
多波束联合遥控水下机器人在高土石坝水下检测中的应用
2019-04-26 12:09:32朱伟玺
水利水电快报 2019年4期
朱伟玺,马 俊
(华能澜沧江水电股份有限公司糯扎渡电厂,云南 普洱 665008)
鉴于水下环境的复杂性、检测区域范围大等因素,目前,高土石坝坝前淤积、坝后冲淤和水下坝面等的水下检测主要采用传统的蛙人水下检测技术。但该技术受下潜时间和深度的限制,且人员生命危险面临巨大考验。单一的多波束探测系统只能对大范围的检测区域进行扫描,采用条带状水深图,全面了解探测区水下地形情况,但无法准确、直观地判断待测对象的量化指标,因此需要联合遥控水下机器人的高精度局部探测功能对重点区域进行扫描,从而得到较为准确的水下检测状况[1]。
与传统蛙人水下检测技术相比,多波束联合遥控水下机器人技术可发挥两种技术的优点,快速、连续、全方位和多角度地获取采集数据,准确真实地描述高土石坝坝前淤积、坝后冲淤和水下坝面等异常情况,从而弥补传统水下检测技术的弊端,克服水下复杂环境的限制,为衡量缺陷等级和制定缺陷修复计划提供重要基础数据[2]。
1 多波束探测系统工作原理
多波束探测系统主要利用发射换能器阵列向海底发射宽扇区覆盖的声波,利用接收换能器阵列对声波进行窄波束接收,通过发射、接收扇区指向的正交性形成对水下地形的照射交叉区域称为脚印,根据声波到达时间或相位即可测量出对应点的水下被测点水深值,若干个测量周期组合形成带状水深图(见图1),从而描绘出水下地形的三维特征。
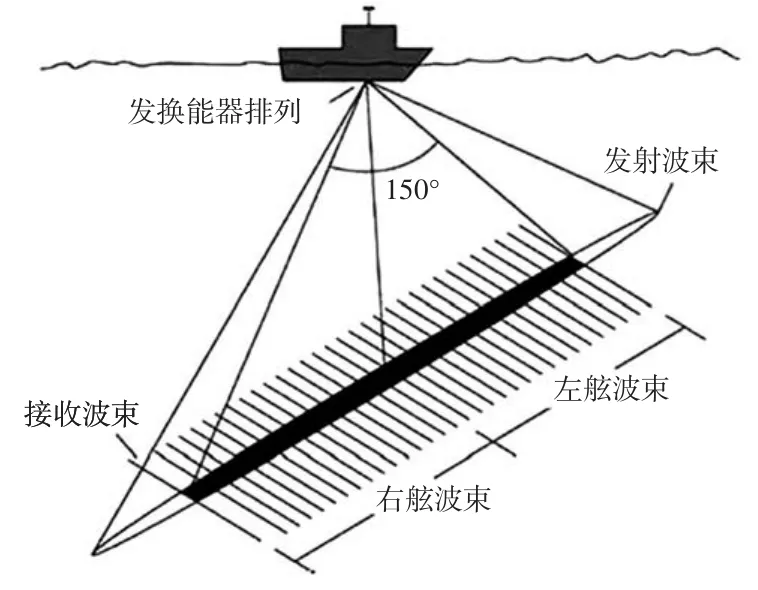
图1 多波束探测系统工作原理示意
该系统主要部件包括3个子系统(见图2):①多波束声学子系统(发射接收换能器阵和信号控制处理电子系统);②辅助设备(卫星定位系统、姿态传感器、验潮仪和声速剖面仪等);③数据后处理软件(典型如Hypack)及相关软件和数据显示、输出、储存设备[3]。
2 遥控水下机器人系统工作原理
遥控水下机器人是一种由水面遥控结合水下作业的综合系统,可在水下摄像、水下空间数据采集和声呐回传,按工作模式可将水下机器人分为2种:有缆水下机器人(ROV)和和无缆水下机器人(AUV)。从检测费用、时间和区域等角度考虑,在水库大坝水下检测中一般采用有缆水下机器人,该系统主要由ROV主机、地面控制系统、绞盘管理系统3个部分组成,主要通过脐带缆(通气管、电缆线、信号线等)完成供电和功能控制,具有作业时间长、控制可靠、动作灵活等优点,适用于开展负载的水下作业任务[4]。水下机器人系统工作原理和组成部件见图3~4。

图2 多波束探测系统子系统

图3 水下机器人系统工作原理示意
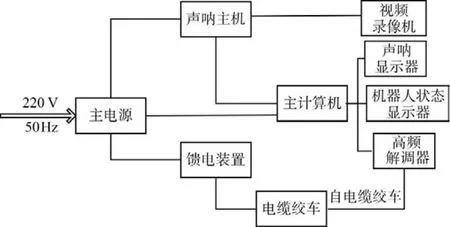
图4 水下机器人系统组成部件
3 多波束探测系统精度评估
多波束探测系统引起误差的主要因素包括多波束换能器量程和多波束辅助传感器(姿态测量、声速测量及GPS测量)。根据各种因素可将精度评估分为3类[5]:
(1)静态探测精度评估。反映系统深度重复测量精度,用来评价声呐测深系统的水深测量精度,但无法暴露整个系统各误差源引起的水深和位置误差,是有限项误差评估的方法。
(2)相对探测精度评估。对系统自身的测量数据进行精度评估,由于系统的一些传感器误差对测量水深的影响自中央波束向边缘波束增加,使中央波束精度明显高于边缘波束精度,该精度反映出影响波束水深精度各因素综合误差。
(3)绝对探测精度评估。由于多波束测深系统采用了波束开角小于3°窄波束技术,其中央波束的精度应高于单波束测深精度,在技术上不能采用由单波束系统来检验多波束系统的方法。绝对精度评估方法是对多波束测深系统的系统偏差和外侧波束的精度进行分析和评估。
4 联合探测技术
多波束探测系统能够提供大范围内高精度的水下地形数据,可全面探查水底地形的起伏情况,但无法准确、直观地发现异常区域。遥控水下机器人可近距离地提供水下局部情况的真实照片,但无法全面高效地了解整个探测区域的水下复杂环境,水下作业存在高风险及盲目性。因此可发挥两种系统各自的优势,采用多波束探测系统的面积普查和遥控水下机器人的局部详查相结合的方式进行水下探测。待水下缺陷区域确定后,可采用多波束探测系统对重点部位进行精细化扫描,实现大坝水下隐患的定性和定量描述,可为评判建筑物缺陷等级和制定修复计划提供重要基础数据。
5 应用实例
运用Sonic2024多波束探测系统和Seamor 600F 2/4遥控水下机器人系统于2016年7月10日至12月11日、2018年5月9日至11月30日,对大坝水面以下部分进行4期三维激光扫描观测(见表1)。分别选取枯水期和丰水期,第一期水位777.00 m,第二期水位812.00 m,第三期水位777.00 m,第四期水位812.00 m。
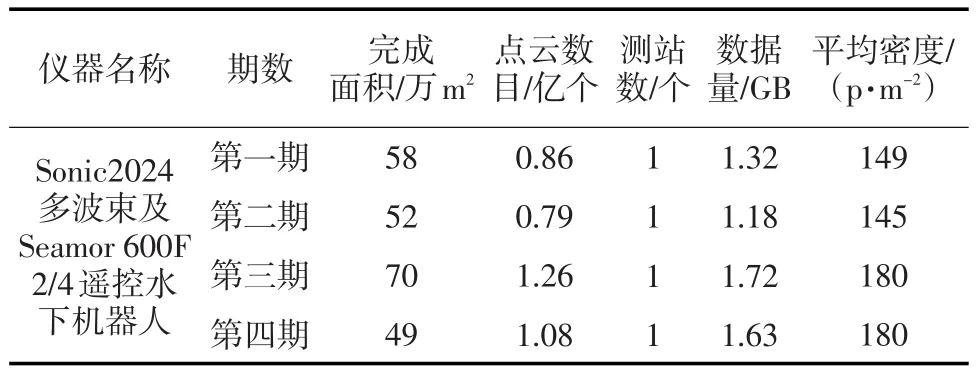
表1 大坝表面扫描点云数据采集统计
在水下探测过程中,需要遵循以下原则:
(1)最大水深时波束开角20°,单测线点间距小于0.34 m,波束开角随测线移动适当增加,以确保足够的重叠度。
(2)为了实时记录船只的位置和运动姿态,将罗经的数据输出到实时采集系统中,对罗经进行纬度设置、网络设置和输出设置等。
(3)采集两个以上控制点进行坐标转换,检查流动站测量精度后,将流动站接收机与多波束测深系统相连,使多波束获取的坐标与工程坐标相一致。
(4)在后期数据处理过程中进行必要的姿态改正,包括时延的校正、横摇校正、纵摇校正、艏摇校正等,分别选择平坦的水下地形区域以及有起伏的区域,进行重复多次往返测量。
(5)根据系统水下探测结果进行精度验证和误差改正。
5.1 点云数据获取和数据处理
在水下探测过程中,以离测区最近的变形观测基点(DB-JQR-JD01S观测房顶基点)作为RTK工作基点,实际采集测线与设计一致,平均测线间距20 m,共布设7条测线,测线间覆盖率≥60%。水下数据的采集过程中,严格控制船速和航线,以保证水下多波束数据满足设计精度要求。
如图5所示,选取7条水面测线,平均间距20 m,单个扫描点间距为50 cm;选取左右坝肩两个基点(DB-JQR-JD01S、DB-JQR-JD02S)、上 游 坝 面(DB-TP08-11)一个基点共计3个点作为观测基准点。根据既定的探测路径依次探测水下待测区域获取初始点云数据,并经过噪点剔除、点云配准、数据过滤、数据分类和抽稀等数据预处理过程后,得到水下区域整体结构化点云数据,进而构建水下待测区域三维模型。
坝体测量点云数据4期扫描平均密度约为164 p/m2,折算后扫描点的间距约50 cm,经过相关数据处理分析后,有效的数据量约为5 600万点,构建模型分辨率为6 cm。
经过4期多波束扫描和水下机器人探测可知,获取点云数据需经过去燥、滤波和粗差处理后形成平滑的第一、二期基础点云数据(见图6)。对于右泄的重点部位结合开挖轮廓图和扫描点云数据进行二次建模重点分析(见图7)。为了整体分析坝前库底的探测状况及其形成原因,可将水下扫描建模部分和大坝整体模型构建成整体可与竣工模型进行对比分析(见图8)。对于右泄入口处需用水下机器人进行重点探测,探测混凝土的破损情况,为后期做进一步结构分析提供数据支撑(见图9)。

图5 大坝水下区域探测路径
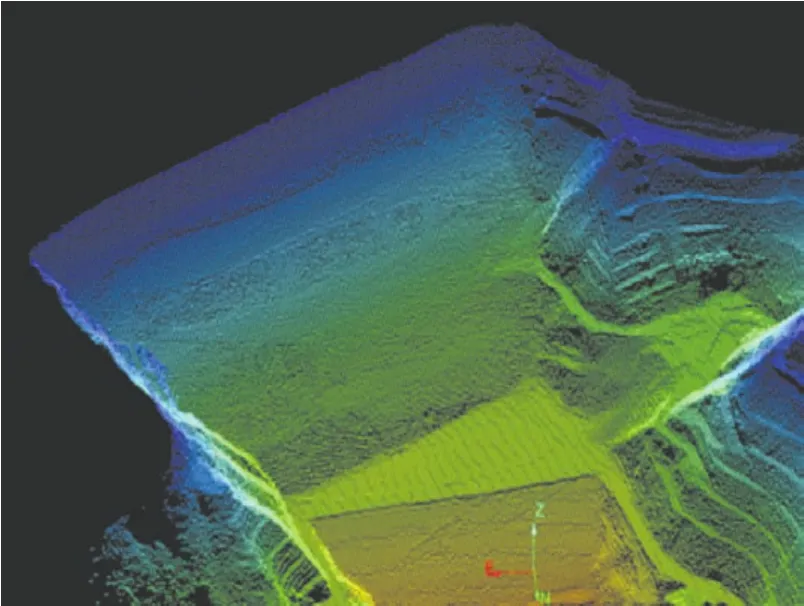
图6 第一、二期迎水面多波束点云
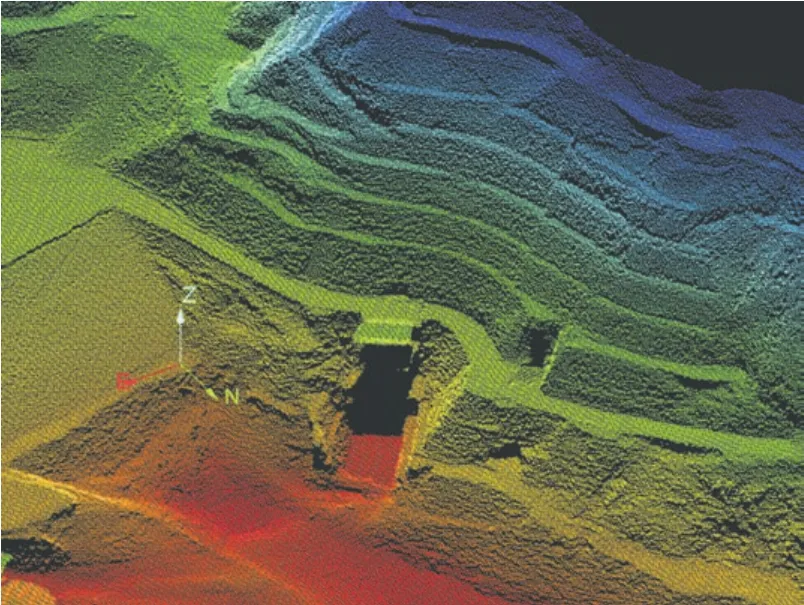
图7 第三、四期右岸泄洪洞多波束点云
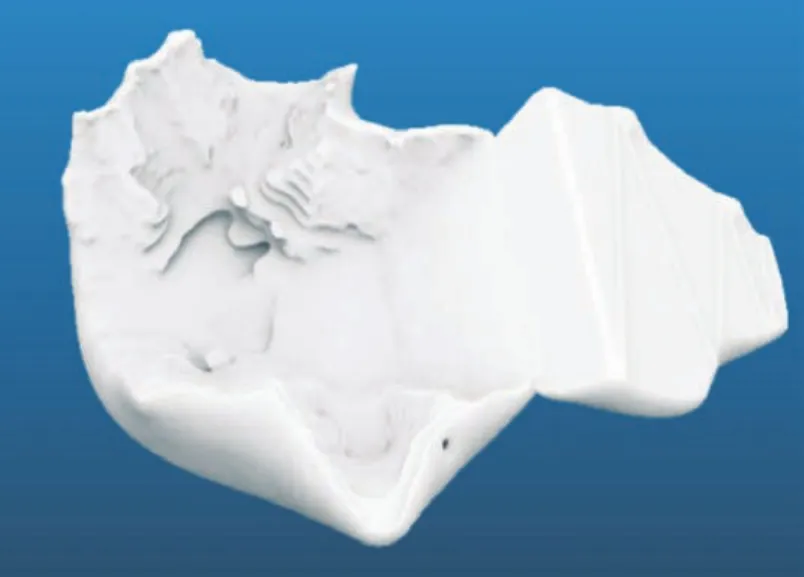
图8 整体坝区三维重建示意

图9 水下机器人探测混凝土结构麻面
根据4期测量数据对比分析可知:
(1)大坝坝前水下部分淤积层普遍较薄,其厚度小于80 cm,但在右坝肩部分有小范围的淘蚀现象,在坝段桩号0+80 m、左岸1、2号导流洞进口两处有少量集中淤积现象,淤积总量约为496 m3。
(2)在左右岸泄洪洞进水口处有少量混凝土出现麻面现象,破损总面积为0.76 m2,不影响泄洪洞的整体结构稳定性。
5.2 数据精度分析
水下多波束扫描系统的精度主要由RTK测量精度、惯导精度和测距精度确定。
(1)RTK测量精度。RTK基站架设于DB-JQR-JD01S观测房顶部基点,Trimble R7 GNSS系统的测量精度为平面±2 cm,高程±3 cm。
(2)惯性导航系统。惯性导航系统本身并不参与测量,主要用于纠正多波束测深系统在测量过程中的行船姿态,进而实时改正观测数据,因此惯性导航系统的精度与测量深度有很大关系。本次作业过程中,水下最低点约为高程600 m,最高点约为高程777 m,最大水深约为180 m,在该深度条件下,惯性导航系统精度约为±(2~3)cm。
(3)声纳精度。多波束声纳精度和惯性导航系统精度类似,主要取决于测量水深,在该深度条件下,声纳精度约为±(2~3)cm。
综上所述,在各类误差的影响下,经过精确计算和数据分析可知,水下多波束测深点云数据的精度≤10 cm。
6 结论与展望
联合检测系统可充分发挥多波束探测系统和遥控水下机器人系统的优势,建立了一套用于高土石坝水下检测的联合技术方案,实现水下近距离、高精度的定量化扫描测量,准确真实地描述高土石坝坝前淤积、坝后冲淤和水下坝面等异常情况,从而弥补了传统水下检测技术的弊端,克服了水下复杂环境的限制,为衡量缺陷等级和制定缺陷修复计划提供重要基础数据。
该联合水下检测系统在军事领域,海洋领域的运用将有更大的优势,也可为坝前水下拦污栅的检查、消力池水下检查提供借鉴。
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
通信技术(2019年3期)2019-05-31 03:19:08
民用飞机设计与研究(2019年4期)2019-05-21 07:21:30
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
成都信息工程大学学报(2018年4期)2019-01-23 06:57:24
电子制作(2018年23期)2018-12-26 01:01:02
传感器与微系统(2018年7期)2018-08-29 00:44:20
电子测试(2018年6期)2018-05-09 07:31:54
声学与电子工程(2017年1期)2017-06-22 11:30:09
四川师范大学学报(自然科学版)(2015年4期)2015-02-28 14:08:20
