可控震源谐波干扰的分析讨论
2019-04-26 02:39李明亮谢伟王强
中国设备工程 2019年6期
李明亮,谢伟,王强
(东方地球物理公司,河北 保定 072750)
对可控震源地震进行勘探,需要注意震源车传输信号的方式,可能会受到各种因素的影响产生谐波。不管在什么样的地表结构下进行工作都会产生谐波干扰,这种谐波干扰会通过可控震源进行记录。震源震板与地表不耦合的情况下,震板的力信号会发生畸变,可控震源振动的频率也会发生谐振,从而造成震源信号遭到畸变,谐波相应的也会发生变化,导致可控震源的震板无法接受到信息,从而无法对信号数据进行记录。谐波的产生方式与存在的特征都有较大的差别,因此产生的谐波干扰会存在较大的差距,比如位置、频率等。
1 两种谐波干扰联合压制的方法
1.1 机械系统谐波的形成原理
对可控震源的机械系统着手,分析机械系统存在的原因,因为可控震源的信号是非正弦,因此,傅立叶基数能够兼容任何一种类型的非正弦信号,如图1 所示。在傅里叶级数原理的展开式中,最小的正周期与原函数的周期部分相等,一般情况下被称为一次谐波,因此高次谐波的频率是一次谐波频率的若干倍。比如是一次谐波频率2 倍的波被称为二次谐波,3 倍的波被称为三次谐波。可控震源的机械系统发生畸变的原因有很多,比如编码器、液压系统、电系统、重锤、活塞皮囊等,都会让机械系统发生畸变。而可控震源本身存在的谐波畸变是无法改变的。
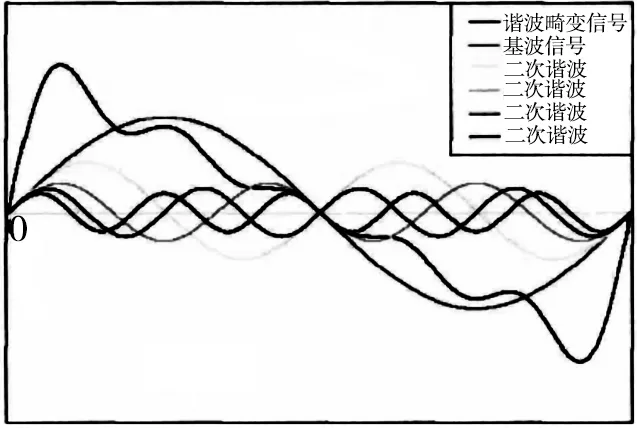
图1 非正弦信号分解示意图
1.2 表层响应谐波形成的原理
当可控震源的信号处于向下传播的状态时,震板与地表之间如何不兼容将会发生共振现象,当地震波向下传播时,会与多个信号重合,此时就会产生谐波畸变现象,导致信号发生畸变,这种情况下的畸变谐波就是表层响应谐波形成的原因。如果单单考虑谐振,那么为了简化,假设只存在一种频率,则产生谐波干扰会与地表有一定的关系。可控震源与耦合系统示意图如图2 所示,可控震源振动时的力为:

可控震源与大地之间的响应关系为:

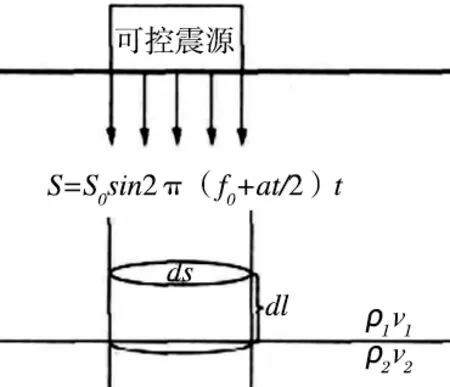
图2 可控震源与大地耦合系统示意图
公式中,ρ 表示密度;E 表示模量;v 表示速度。当ρ1v1>ρ2v2时,B 的值最大,可控震源的振动频率将与大地的频率一致,形成共振耦合响应系统,从而产生谐振。
2 机械系统谐波特征
2.1 谐波信号
可控震源需要有足够的时间来满足信号持续的时间,并对信号进行自定义,如果使用的信号为正弦扫描,则表达式为:

公式中,a1表示振幅时间;表示相位;表示频率。

f1与f2表示起始与终止的频率;T 表示长度。
K 次谐波与扫描信号之间的表达式为:

公式中sk(t)表示第k 次的谐波,当k=1 时,是一次谐波,当k=2,3,4 时为二次谐波、三次谐波,如果k>3,则表示高次谐波,因此k=4 时表示的是高次谐波。k 次谐波的频率是信号的k 倍。间谐波指的是畸变信号中存在不是一次谐波的倍数的信号,因为不影响谐波的分析,因此可以将少量的信号忽略。力信号中会有少量的不规则信号,并且地震记录会将这种不规则的信号进行记录。
2.2 谐波干扰模拟
机械系统产生的谐波干扰,对最初的炮记录有两种谐波干扰情况,本炮谐波与邻炮谐波,本炮谐波干扰是当前炮记录中形成的污染而产生的谐波干扰;邻炮谐波干扰则是对之前的炮记录造成的污染产生的谐波干扰。如图3 所示,用线性升频与线性降频扫描信号对速度模型进行计算,在模型中有很多的地层存在,其中有一个类似于椭圆形的物体,该物体能够达到的速度超过5000m/s。
目前针对邻炮谐波干扰采用的方式是机械系统谐波压制,邻炮谐波干扰的范围分布较紧密,属于近偏移,近偏移指的是产生谐波干扰炮的距离,图3 中的速度模型采用的方式是滑动扫描,主要的参数有线性扫描、起始/终止频率以及扫描时间,滑动扫描的时间为3s,采样时间为0.5ms。震源车分别在1km、2km、3km 处激发。
2.3 谐波压制
机械系统谐波可用来指导机械系统谐波干扰的压制。机械系统谐波出现的时间可以通过表达式进行表达,在条件不好的地方进行数据的采集要避免产生谐波干扰。机械系统的谐波与一次谐波在相位上有一定规律,因此机械系统的谐波压制采用的方法是相移法。分析机械系统的谐波干扰原理,在震板记录中的力信号中有一次谐波信号,测试力信号能够得到地震记录的谐波干扰。将机械系统谐波干扰去除的方式是使用原始数据减去预测谐波干扰数据,得到的结果就能够将谐波干扰去除。
3 表层响应谐波特征
3.1 谐波信号
分析表层响应谐波能量,如图4 所示,图a 中的线框分别表示受到谐波干扰与未受到谐波干扰的影响变化,图b 表示的是方根振幅曲线,从图中可以看出,正常信号的能量要比谐波能量低很多,为了能够更加清晰的显示谐波能量,需要将图中的曲线分开表示,对图c 和d 的反应情况进行分析可以得出,谐波的能量高达420000,没有谐波的区域能量只有260。谐波在单炮记录上主要分布在近偏移,对谐波的压制非常不利,如果炮域将谐波的能量强行去除,会影响去噪的效果。
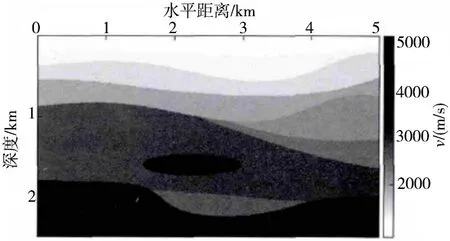
图3 速度模型

图4 谐波能量分析
从图中的空间分布来看,可控震源的采集并没有将表层响应的谐波干扰全部存储,而是否出现谐波干扰则与地表的情况具有一定的关联,而且单炮记录有自身的特点,就是具有一定的随机性。对表层响应谐波干扰的原理进行分析,出现表层响应的原因就是因为可控震源中力信号与畸变信号重叠得来的结果。如果机械系统不存在谐波干扰,则力信号就是扫描信号,扫描信号就是力信号。表层响应谐波干扰具有集中性的特点,且地域性强,而单炮记录有一定的随机性,因此产生的谐波干扰只能集中在某一个较小的频段中。
3.2 谐波正演模拟
为了明确产生谐波干扰原因,对起始/终止频率、扫描长度、地表情况进行对比研究,起始/终止频率f1与f2的频率为6Hz 与84Hz,长度T 为12,在线性信号中添加不同的谐波畸变才能进行谐波正演模拟。
3.3 表层响应谐波压制
表层响应谐波能够对谐波进行压制,对影响表层响应谐波的原因进行分析后,可以设计采集信号的参数,消除表层响应谐波干扰,或者降低扫描信号的始末频率,延长谐波产生的时间,能够更好的压制谐波干扰的产生;增加扫描长度也可以有效压制谐波干扰,且地表越硬则越容易产生谐波干扰。
4 结语
机械系统产生的谐波与表层响应产生的谐波有较大的区别,产生机械系统谐波的原因是因为系统发生了畸变,从而造成输出的力信号与可控震源的扫描信号不同,从而发生谐波干扰;而表层响应谐波产生的原因是因为力信号与向下传播信号的方式不同,从而产生谐波干扰。可控震源采集技术在未来的地震勘探中的发展前景广阔,会逐渐发展为高效采集方向。
猜你喜欢
金属热处理(2022年3期)2022-04-09
东南大学学报(自然科学版)(2020年1期)2020-01-16
无人机(2018年1期)2018-07-05
摄影之友(影像视觉)(2017年10期)2017-11-07
现代商贸工业(2016年17期)2017-02-15
科技资讯(2015年7期)2015-07-02
弹箭与制导学报(2015年1期)2015-03-11
燃气涡轮试验与研究(2011年1期)2011-04-16