用意念控制机器人
2019-04-25 06:38李忠东
青少年科技博览(中学版) 2019年1期
李忠东

目前,我们可以用遥控器或手机屏幕操控机器人,也能够通过编程让它们学习如何完成高难度的任务。那么能不能在现有的基础上,设法让机器人“读懂”人心,而人类只需用意念就能操控它们呢?虽然这事听起来不可思议,但肯定在大多数人的想象中出现过,在科幻影片中看过。而不久前,这样的场景在现实中真的实现了。
戴“帽”操控机器人
美国麻省理工学院与波士顿大学联手。开发出了一個反馈系统,让机器人可以读取人类思想。在创建该系统时,科学家首先利用脑电图和肌电图分别监测大脑活动和肌肉活动。通过将这两者合并,找到了一种更可靠的生物传感方法,使得系统可以让机器人在没有被训练过得情况下为用户工作。
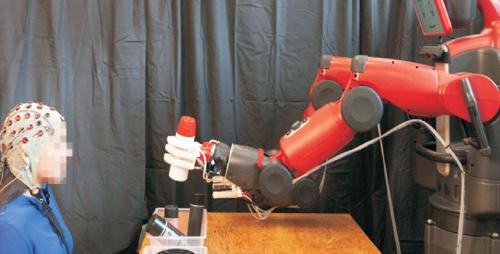
使用时,人类需要依靠一项特殊的脑电极帽。这顶帽子的作用是读取和分析人类的脑电图,用户戴上之后就可以对机器人进行操控。机器人能接收来自人类大脑活动的信息,并根据指令做出相应的动作。
用意念操控机器人的原理听起来很简单,但是其中的算法相当复杂。机器人本身不能直接读出人类的思想,而是依靠背后的反馈系统在运作。其中的核心技术是脑电图监视器,可以对大脑发出的数据进行处理,通过算法计算出人类在思考什么,再将指令传递给机器人,它接到指令后既可以进行相应的动作。
将来,该系统能通过思想控制多项任务,不断升级就可以做更复杂的事情,最终以更直观的方式完全控制机器人,让未来充满无限的可能。
实时纠错与人互动
在2018年6月26日召开的“2018机器人技术:科学和系统”大会上,美国麻省理工学院的科学家公布了这个新开发的界面系统,用可连接到大脑的系统来指引机器人Baxter工作。
机器人Baxter可以实时读取人类脑电波,以便了解人类何时不满意其行为。当它意识到用户认为自己犯了错误时,会立即纠正。由于内置一套“基本常识”系统,机器人Baxter掌握了一基础动作,例如知道移动或是放下某个物体之前,需要将其拿在手里。它还拥有一个亲切友好的界面,既可以给它编程,也可以通过“演示训练”教会它做一件事情。用户可以做出细微的手势,指示机器人执行不同的任务,比如从地上捡起一串钥匙放在桌子上。
当人类发现错误时,大脑会发出一种名叫“误差相关电位”的特定脑信号。“误差相关电位”信号先被脑电极帽抓取,反馈系统收到后即判断出“人类对该机器人的选择表示不同意”,再把这个信息传递给机器人。机器人接收到信号后就会“知道”刚刚的选择是错误的,于是便显出“害羞脸红”,立刻停止正在从事的任务,等待人类的手部动作信号去处理。如果没有接收到信号,机器人就会继续重复它此前的动作。
由于系统可以使用手势和情绪反应等指挥,用户在机器人损坏东西之前就可以阻止它,甚至可以帮助机器人在任务开始前对其任务进行修改。在一次实验中,研究团队要求机器人Baxter从飞机机身3个地方挑选一个地方进行钻孔。由于任务出现变化,站在附近的人在机器人工作前向它做手势,改变钻孔位置,以训练机器人Baxter能很好地执行新指令。在另一次实验中,机器人拿着线圈拟放进左边颜料盒。当用户用意念加以制止时,它就需要等待人类指示向左或向右的方向才能重新工作,这是机器人在进行复杂而微妙的通信活动时采取的关键步骤。
有了这成功的实验,研究团队认为接下来有可能通过意念让机器人Baxter处理更复杂的任务,例如训练它与老年人、有语言障碍或行动不便的残疾人互动,甚至在口头交流之前通过关注或发出警报来预防意外。
“当你在操控Baxter机器人时,所要做的就是心里赞同或不赞同它的行为。没有必要去训练自己按照规定的方式去思考。”研究人员还特别指出,“机器人能读懂你的手势和思维,会主动来适应你,而不是反过来要你去适应它。”
猜你喜欢
小学生必读(低年级版)(2022年10期)2022-02-16
河北画报(2020年10期)2020-11-26
测控技术(2018年5期)2018-12-09
电子测试(2018年18期)2018-11-14
成都信息工程大学学报(2018年6期)2018-03-21
中国公路(2017年17期)2017-11-09
下一代英才(酷炫少年)(2016年12期)2016-02-28
电源技术(2015年5期)2015-08-22
现代教育技术(2015年1期)2015-02-26
机械与电子(2014年2期)2014-02-28