
超大型矿砂船智能化总体设计方案
2019-04-22 12:30:12黄洁瑜
船舶设计通讯 2019年2期
陈 立,朱 兵,黄洁瑜
(1.上海船舶研究设计院,上海201203;2.中国船舶工业贸易公司,北京100044)
0 前 言
随着信息技术不断发展,各个国家对智能船舶研究分别提出了不同的技术路线。 韩国计划通过智能自航船舶平台技术等课题的研究实现船舶远程控制、自航等功能。 日本通过智能船舶应用平台研究,建立数据中心并制定ISO 标准。 欧洲康士伯、瓦锡兰等公司已着手无人船舶的研发与建造。 尽管不同技术路线的操作方式有所不同,但整体方向都是通过信息与通信技术实现信息的高度集成,使船舶达到一定的智能化、自主化水平。
依托智能船舶1.0研发专项的示范船400 000 DWT超大型智能矿砂船(400 000 DWT VLOC),以既能提升船舶数字化、信息化水平,又能帮助船东提高营运管理效率为目标,提出一套与智能船舶发展相适应的船舶智能化总体设计方案。该方案从船舶需求分析入手,规划并确定智能功能,根据实船配置确定系统架构,分析智能系统的安全性、稳定性及可靠性对架构设计的要求,结合实船示范应用细化设计方案。
1 设计需求
通过全面分析400 000 DWT VLOC 在营运过程中对航线规划、节能环保、运营维护、货物装载特性等方面的需求,有针对性地确定智能功能,解决船舶营运管理中的实际问题。 400 000 DWT VLOC 智能化体现在以下几方面:
1) 400 000 DWT VLOC 是中巴航线铁矿石运输的主力船型,航线跨越了三大洋——大西洋、印度洋和太平洋,经过数十个海况复杂多变的海区。 超大型船舶技术复杂,航行时间长,故障维修及周期性维护成本高。 航运企业首先要考虑的问题是如何降低船舶控制和管理难度,减少人为操作失误,提高船舶营运安全性,实现视情维护,制定预防性维护计划方案,降低设备故障率,提升船舶可用时间,降低船舶全寿命周期运维成本。
2)400 000 DWT VLOC 装载的是巴西出产的铁矿砂,属于可液化的货物。 当此类货物含水量超出安全运输的含水量极限(TML)时,其所含水分会随着船舶摇摆和振动渗出,导致货物呈流态化并产生自由液面。 当船舶横摇时,高密度的黏稠流态化矿砂会流向船舶一舷,造成稳性损失和局部结构的损坏,会给船体结构强度安全带来很大的影响。 因此,在航运过程中实时自动监控矿物液化状态,实现对矿物液化程度的安全预报及辅助决策,能大幅度提高船舶矿物运输的安全性。
3)400 000 DWT VLOC 燃油消耗受航速、装载、气象等多种因素影响,节能减排、降低成本的关键是主、辅机等核心设备保持良好运行状况。 考虑风、浪与装载对船舶性能的影响,科学地进行船舶能效管理,在提高经济效益的同时减少温室气体排放,实现绿色航运。
4) 400 000 DWT VLOC 本身的网络通信手段主要采用卫星通信。 随着船队管理水平不断提高,岸基管理公司与航行船队之间的通信数据量越来越大,可靠性要求越来越高,船东迫切地需要从传输稳定、数据安全、资费经济等角度优化现有的通信方式。
针对上述需求,确定船舶辅助自动驾驶、矿物液化监控、综合能效智能管理、设备运行与维护、船岸一体通信等智能化功能在400 000 DWT VLOC 上示范应用,见表1。
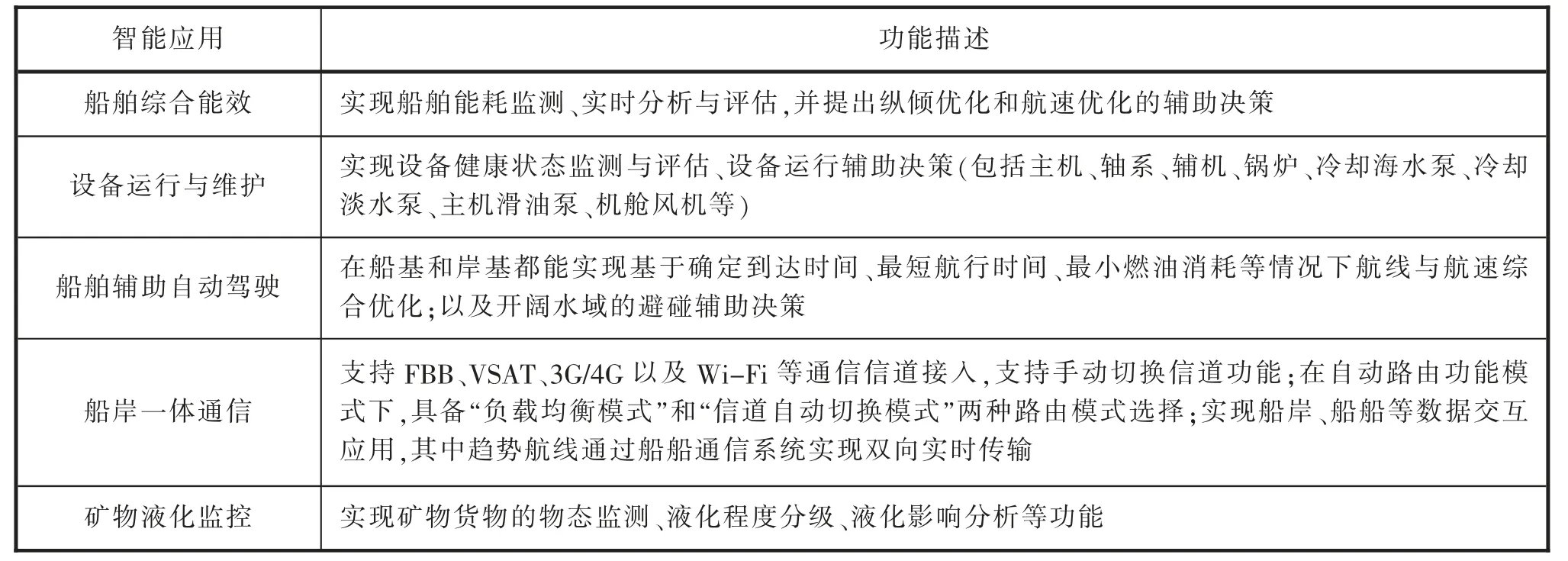
表1 智能应用及功能描述
2 架构设计
架构设计是船舶智能化总体设计中最重要的一个环节,它决定了船舶在数字化、信息化、智能化方面的程度,对船舶及智能系统的稳定性、可靠性、安全性起到关键作用,是实现智能功能的基础。
传统的系统架构通常采用网状架构 (如图1),为了实现信息与交互,不同的系统或传感器之间两两相连,电气连线复杂,信息采集冗余;单个系统拥有独立的工作站,船上同一处所经常存在多个系统的设备。 该架构的优点是可靠性高,单条通信链路的故障不会影响其他系统的正常运行。

图1 网状架构
相比于传统架构,400 000 DWT VLOC 选择了“平台+应用”的架构(如图2),各智能应用基于平台获取所需信息并实现相应功能,通过平台实现各系统及传感器的联通。 该架构拥有结构简单、资源占用小、效率高等优点,但平台的建设与维护需要更多的费用,可靠性略低于网状架构。
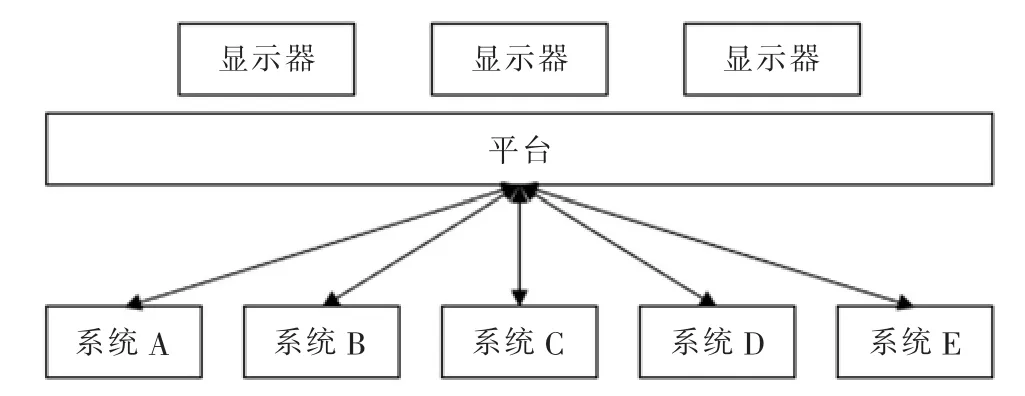
图2 “平台+应用”架构
对比上述两个架构,在系统数量较少的情况下,网状结构的可靠性高且成本低,可优先选择该架构。在系统数量较多(大于3 个)的情况下,平台+应用的架构更简化, 占用资源更少且能实现信息共享。智能船舶1.0 采用该“平台+应用”的架构形式,通过搭载5 个智能应用,实现了船舶数字化、信息化及辅助决策功能,满足了多方面需求。
400 000 DWT VLOC 的智能系统架构分为感知层、平台层和应用层,如图3 所示。 通过感知层实现全船信息感知,经过平台层的数据传输、处理、存储和分发,智能应用模块获得所需要的信息数据,并实现各自功能。
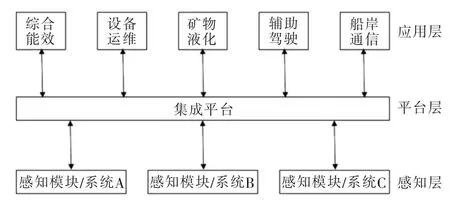
图3 400 000 DWT VLOC 智能系统架构
2.1 感知层
400 000 DWT VLOC 有着感知信息点数量多、种类多、分布散等特点,而且不同智能应用对感知信息的需求有重叠。 确定感知点的信号来源,统筹考虑所有智能应用对感知点的需求,以及根据感知点的分布情况来最终确定采集单元布置设计方案。 感知点选取及传感器布置的合理与否将影响设备的运行稳定性、采集精度、信息可信度等,进而决定智能功能及辅助决策的完整性及准确性。
在400 000 DWT VLOC 工程设计实践中, 首先根据5 个智能应用对感知信息的需求梳理成表,并对表中每一个信号点补充信号编号、信号名称、采集单元名称、信号类型、需求方(智能应用)、信号来源及信号来源的位置等信息,然后根据船体、系统、设备等配置情况,并结合特殊传感器的安装工艺要求,完成感知点布置设计。 400 000 DWT VLOC 在艏部锚机控制室、机舱上平台、机舱下平台、两个数据中心布置了5 个采集单元,用于将感知信息采集并传输至平台层。 除了常规配置的传感器外,还根据智能应用需求配置了特殊要求的专用感知模块,见表2。 针对这些感知模块,结合实船情况优化了布置设计。例如,由于该船型较长,配置了2 套运动传感器,分别安装于首部储藏室和尾部上建区域的中心线上,可以更好地测量到船舶的运动姿态。 根据矿物液化监控系统的开发需求,需要选择在晃荡较大、矿物液化可能性较高的货舱加装传感器,以便获得较为有效的监测结果。 但是,考虑到第一货舱的不规则性,且容积较小,因此最终选择第二货舱的矿砂作为监控对象。 为保证3 种特殊感知模块正确安装,除了在安装前对施工工艺进行了研究外,还在安装完成后进行了气密性试验。 感知信息的采集质量由于受到感知模块精度、采集模块稳定性等方面的影响,部分感知信息还需进行校准。 例如,随着船舶主机运行时间不断增加,采集到的轴功率数据会产生一定的偏移,从而影响智能辅助决策的准确性。
2.2 平台层
2.2.1 平台层可靠性设计
平台层作为智能系统中的关键系统,需足够的安全性和可靠性。 集成平台通过数据的统一采集、传输、处理、存储与分发,实现了数据集成、界面集成和应用集成。 从系统架构冗余、信息服务冗余以及网络安全3 个方面开展可靠性设计。
在400 000 DWT VLOC 上, 集成平台内的部件均为双套设置,通过交叉的电气连接实现通信冗余,简易架构如图4 所示。 智能系统采用双路船用电源供电方式,同时配置专用不间断电源(UPS)以保证智能系统在船舶失电30 min 的情况下仍能正常工作,实现了电源冗余。 通过通信与电源的冗余设计,该船智能系统通过了失效模式和影响分析(FMEA)测试,可保证智能系统中任一设备、线路及电源故障均不影响系统的正常运行。 尽管从架构上实现冗余配置,已满足规范规则和使用要求,但从信息服务层面上来看,仍可以通过双机热备的方式提升系统可靠性。 作为互为冗余备份的双套设备,当其中一套设备发生故障后,另一套应能立即接管原设备中运行的应用, 并能在故障解除后完成数据的自同步。从网络安全层面,配置交换机、服务器通过了网络风暴测试以及网络渗透测试。 同时,开展风险识别、风险评价、风险分析与风险控制等工作,通过了网络安全风险评估,保障了平台的可靠性。

表2 专用感知模块清单

图4 集成平台简易架构
2.2.2 平台层功能设计
集成平台通过硬件及软件的配置可以实现数据集成、界面集成和应用集成。 由于平台的存在,全船的感知信息汇集成数据池,不同的智能应用都可以从数据池中获取需要的信息。 同时,无论是界面还是功能,在同一处所只需一套计算和显示终端即可实现多个智能应用的运行和切换。为实现数据集成,400 000 DWT VLOC 在数据采样规则、 传输规则以及清洗规则方面做了一定研究。
不同智能应用系统为实现各自功能,对感知信息的采集精度、采集频率有着不同的需求,在实际操作中,应根据感知模块自身的输出能力以及智能系统的带宽限制综合确定。
在确定数据通信协议的过程中,应根据采集精度确定通信模块的寄存器地址,对于特殊传感器尤其需要关注。 例如,本船为满足综合能效管理对燃油流量信号的精度需求,在传输相关信号时采用两位寄存器分别存储流量值的整数部分及小数部分,与每位寄存器存储单个信号的方式有所不同。另外,受到通信数据体量和不同设备配置的限制,通信线缆的规格和数量差异较大,同时为了配合船厂预制线缆工作节点,应尽早根据通信协议类型确定通信线的类型与数量。
在数据清洗过程中,应根据营运状况对每个感知点设置量程范围,并对数据空值、数据超限、信号丢失等各种异常情况确定判断方法及清洗规则。 在400 000 DWT VLOC 设计中曾遇到过寄存器中某一特定的编码同时表征数据超限及数据丢失两种异常状态的情况,导致智能应用无法准确判断状态。 也遇到过量程设置不合理导致某个船舶吃水信号长期处于超限状态。 这些问题都是在设计过程中需要关注并尽量避免的。2.2.3 船岸通信
通过船岸通信实现船舶营运数据回传、岸基远程管理、智能应用远程支持与维护等功能。 船岸通信的设计应保证数据安全、流量管理、传输稳定。 唯有保证通信安全, 通信数据才可信。 400 000 DWT VLOC 通过权限管理模块和数据加密模块, 确保传输过程的安全可控。 经实船验证,本船在营运期间未发生网络安全相关的异常事件。
船岸通信的数据格式种类较多,包含结构化数据如设备运行数据, 以及非结构化数据如视频数据、气象文件。为降低船岸通信的流量,应根据不同数据类型采取不同传输策略。对于船舶视频监控信息,采用视频压缩处理方式回传;对于结构化数据则采用轻量化处理与压缩的形式回传。 根据该船营运数据,集成平台平均每个月产生结构化数据约40 Gbit,经过轻量化处理后,实际通信约1 Gbit 的数据流量,有效节省了船岸通信的费用。
无论是岸基管理所需的数据分析,还是岸基智能应用的运行,都是建立在船岸数据连续传输的基础之上的。 船舶在营运过程中,由于卫星信号不稳定,气象文件等数据在传输过程中会通信失败。 通过开发断点续传模块,通信链路在恢复正常后能够继续回传之前未完成传输的数据,有效提升了数据传输的稳定性。
2.3 应用层
由于各智能应用的业务信息并未主动汇总到平台层,因此智能应用除了独立开发与测试外,更重要的是与其他应用之间的数据交互测试。 在实际应用过程中,船舶航线和航速的优化分别由船舶辅助自动驾驶系统和船舶综合能效系统完成。 例如,本着优先确保航行安全、避开台风等恶劣天气的原则,船舶辅助自动驾驶系统将优化后的航线数据传递给船舶综合能效系统才能完成航速优化,此两系统之间数据交互是船舶能效优化的关键。
由于集成平台汇总了全船不同类型的数据,各智能应用在调用相关数据时的方式也是不同的。 例如,通过数据库可以实现模拟量调用,而调用文件类型的数据,如海图文件、气象文件等,则需通过连接FTP(文件传输协议)的方式并配置不同的接口参数。
以上都是在设计架构的应用层时需要考虑的。现阶段对于智能应用要求更多的是提供辅助决策,船东通过该辅助决策可以在船舶驾驶及营运管理中获得新的思路与建议,提升船舶营运的安全性、经济性、高效性、环保性,而辅助决策的精确性将是未来各智能应用需要重点提升的方向。
3 结 语
400 000 DWT VLOC 智能化总体设计方案按照“平台+应用”的设计理念,从感知点选取及布置、平台层可靠性及功能设置、 船岸通信与信息安全和信息交互等方面,开展感知层、平台层和应用层设计工作,满足船级社规范要求,并获得CCS 的i-Ship(I,N,M,E)和DNV GL 的SmartShip Descriptive Notation(OE,PE,CME)智能船舶附加标志。 该船在营运期间各智能系统运行稳定,在船舶航行安全、设备运维和营运效率、货物监控等方面实际示范应用效果良好。
在当前阶段,尽管部分基于集成平台的智能应用已实现信息交互,但整体来看,这部分交互的信息目前还不涉及决策与控制应用,对于将来涉及自主控制的智能船舶,信息交互将变得更加复杂。 要满足船舶在不同场景下的自主控制要求,需要实现智能应用之间深度信息集成,这是未来需要重点研究的关键技术。 另外,智能船舶作为信息连接的载体, 网络与信息安全也是体系性的重点研究内容。总之,智能船舶实现多任务自主决策与控制是未来发展方向,船舶智能化总体设计的重要性将更加突出。
猜你喜欢
成都信息工程大学学报(2022年4期)2022-11-18 07:31:10
船舶(2021年4期)2021-09-07 17:32:22
汽车工程(2021年12期)2021-03-08 02:34:30
小哥白尼(趣味科学)(2019年10期)2020-01-18 09:16:22
船舶标准化工程师(2019年4期)2019-07-24 07:21:12
文苑(2018年23期)2018-12-14 01:06:06
文苑(2018年19期)2018-11-09 01:30:14
文苑(2018年17期)2018-11-09 01:29:26
文苑(2018年21期)2018-11-09 01:22:32
电信科学(2017年6期)2017-07-01 15:45:17
