基于元胞自动机模型的车辆换道行为研究
2019-04-21 07:06陈鹏宇胡思奇姜英姿
科学与技术 2019年6期
陈鹏宇 胡思奇 姜英姿
摘要:本文对车辆行驶换道問题进行研究,分析车辆换道对道路交通流量与车辆行驶速度造成的影响。根据驾驶员行为将车辆换道划分为三种:竞争型、协作型、自由型,利用元胞自动机建立微观交通流模型,定义车辆换道竞争程度函数给定新的换道规则与车辆状态更新方程,根据交通流量及车辆行驶速度的仿真结果对三种换道方式进行分析得到协作型换道能够最优提高交通流量与车辆行驶速度。竞争型在交通密度较低情况下比自由型具有优势,但是在高密度情况下,对交通状况会造成负面影响。
关键词:元胞自动机;竞争函数;车辆换道
引 言
近年来,交通系统不断的快速发展,在车辆安全性还是道路流畅性等,都从技术层面上有了很大的提高。但是交通事故并没有减少,相关研究文献对交通事故的发生原因进行调查研究后得知,驾驶员的激进驾驶行为是导致大部分交通事故的直接原因,交通事故中由于驾驶员激进变道作为车祸直接因素的占总事故数的26.4%,竞争型驾驶是指车辆在行驶过程中通过抢占邻近交通状况较好的车道以满足自身车辆的最大速度需求,这种激进驾驶对道路交通行驶安全带来了很大程度的负面影响,本文利用元胞自动机模型从微观层面上对交通流行驶过程中的换道行为进行仿真分析,通过研究车辆换道行为对道路交通流造成的影响,有助于分析合理的驾驶行为,对保障车辆行驶安全与提高道路通行能力具有重要意义。
1.车辆换道行为机理分析
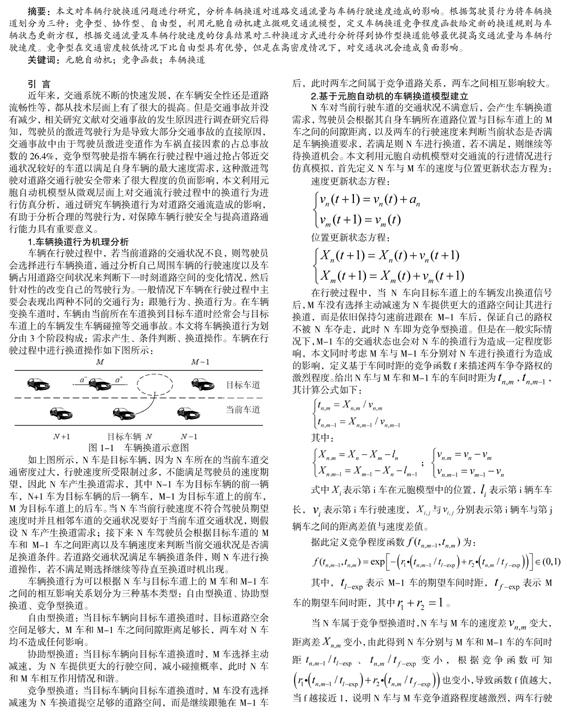
车辆在行驶过程中,若当前道路的交通状况不良,则驾驶员会选择进行车辆换道,通过分析自己周围车辆的行驶速度以及车辆占用道路空间状况来判断下一时刻道路空间的变化情况,然后针对性的改变自己的驾驶行为。一般情况下车辆在行驶过程中主要会表现出两种不同的交通行为:跟驰行为、换道行为。在车辆变换车道时,车辆由当前所在车道换到目标车道时经常会与目标车道上的车辆发生车辆碰撞等交通事故。本文将车辆换道行为划分由3个阶段构成:需求产生、条件判断、换道操作。车辆在行驶过程中进行换道操作如下图所示:
如上图所示,N车是目标车辆,因为N车所在的当前车道交通密度过大,行驶速度所受限制过多,不能满足驾驶员的速度期望,因此N车产生换道需求,其中N-1车为目标车辆的前一辆车,N+1车为目标车辆的后一辆车,M-1为目标车道上的前车,M为目标车道上的后车。当N车当前行驶速度不符合驾驶员期望速度时并且相邻车道的交通状况要好于当前车道交通状况,则假设N车产生换道需求;接下来N车驾驶员会根据目标车道的M车和M-1车之间距离以及车辆速度来判断当前交通状况是否满足换道条件。若道路交通状况满足车辆换道条件,则N车进行换道操作,若不满足则选择继续等待直至换道时机出现。
车辆换道行为可以根据N车与目标车道上的M车和M-1车之间的相互影响关系划分为三种基本类型:自由型换道、协助型换道、竞争型换道。
自由型换道:当目标车辆向目标车道换道时,目标道路空余空间足够大,M车和M-1车之间间隙距离足够长,两车对N车均不造成任何影响。
协助型换道:当目标车辆向目标车道换道时,M车选择主动减速,为N车提供更大的行驶空间,减小碰撞概率,此时N车和M车相互作用情况和谐。
竞争型换道:当目标车辆向目标车道换道时,M车没有选择减速为N车换道提空足够的道路空间,而是继续跟驰在M-1车后,此时两车之间属于竞争道路关系,两车之间相互影响较大。
2.基于元胞自动机的车辆换道模型建立
N车对当前行驶车道的交通状况不满意后,会产生车辆换道需求,驾驶员会根据其自身车辆所在道路位置与目标车道上的M车之间的间隙距离,以及两车的行驶速度来判断当前状态是否满足车辆换道要求,若满足则N车进行换道,若不满足,则继续等待换道机会。本文利用元胞自动机模型对交通流的行进情况进行仿真模拟,首先定义N车与M车的速度与位置更新状态方程为:
速度更新状态方程:
位置更新状态方程:
在行驶过程中,当N车向目标车道上的车辆发出换道信号后,M车没有选择主动减速为N车提供更大的道路空间让其进行换道,而是依旧保持匀速前进跟在M-1车后,保证自己的路权不被N车夺走,此时N车即为竞争型换道。但是在一般实际情况下,M-1车的交通状态也会对N车的换道行为造成一定程度影响,本文同时考虑M车与M-1车分别对N车进行换道行为造成的影响,定义基于车间时距的竞争函数f来描述两车争夺路权的激烈程度。给出N车与M车和M-1车的车间时距为,,其计算公式如下:
其中:
;
式中表示第i车在元胞模型中的位置,表示第i辆车车长,表示第i车行驶速度,与分别表示第i辆车与第j辆车之间的距离差值与速度差值。
据此定义竞争程度函数为:
其中,表示M-1车的期望车间时距,表示M车的期望车间时距,其中。
当N车属于竞争型换道时,N车与M车的速度差变大,距离差变小,由此得到N车分别与M车和M-1车的车间时距、变小,根据竞争函数可知也变小,导致函数f值越大,当f越接近1,说明N车与M车竞争道路程度越激烈,两车行驶速度变化波动越大。重新定义N车加速度,其中为最大期望加速度,为最大期望减速度,假设当N车换道时,M车以概率加速,以概率减速,从而得到M车加速度为:
可得新的速度状态更新方程,并定义是N车在换道时避免与M车发生碰撞的最小距离,根据元胞模型中N车与M车之间距离判断是否大于S,若大于,即满足换道规则,若不满足,则不进行换道。
3.仿真结果分析
3.1元胞自动机模型条件确定
本文在元胞自动机模型中设置两条车道,1车道为目标车辆所在车道,2车道为目标车道,每辆车占据4个元胞(包括车前车后安全距离),道路均由4000个元胞组成,设定单个元胞长度为1.5m,则得到道路长度为6000m,车辆的最大行驶速度,N车与M车最小换道距离为20,M车随机慢化概率为0.3。
3.2不同交通密度下交通流量分析
根据以上定义规则,利用元胞自动机进行仿真模拟,得到三种类型换道方式在不同的交通密度的情况下,道路的交通流量仿真结果如下图所示:
从上图可以看出:在交通密度较低的道路状态下,三种不同换道方式各自影响的道路交通流量差别较小,因为在道路交通密度较低的情况下,车道空余区域较大,车辆有足够的自由行驶空间,期望速度得到满足,大部分车辆并没有产生换道需求。当交通密度逐渐增大时,三种换道方式的最大交通流量开始发生改变,其中协作型换道方式的交通流量最大,次之的竞争型,最低的是协作型换道方式。在道路交通密度逐渐增加但道路状态还不至于形成轻微拥堵的情况下,部分驾驶员为满足行驶速度期望,产生换道需求,这时车辆之间间隙距离较大,车辆换道满足条件的概率较高,因此一定程度的竞争型换道行为能够提高交通流量。但是当交通密度大于85veh/km后,竞争型换道的交通流量开始小于自由型换道,因为当交通密度过高,逐渐出现拥堵现象时,此时在进行竞争换道,会影响周围车辆的交通行为,降低行驶速度,从而降低交通流量。
经过三种换道方式对比可知,协作型换道方式能够最大化提高车道交通流量,在交通密度不高的情况下,竞争型换道的条件基本满足,一定程度的竞争型换道可以提交交通流量,但是在交通密度较高的情况下,自由型换道的交通流量要高于竞争型。
3.3不同交通密度下车辆速度分析
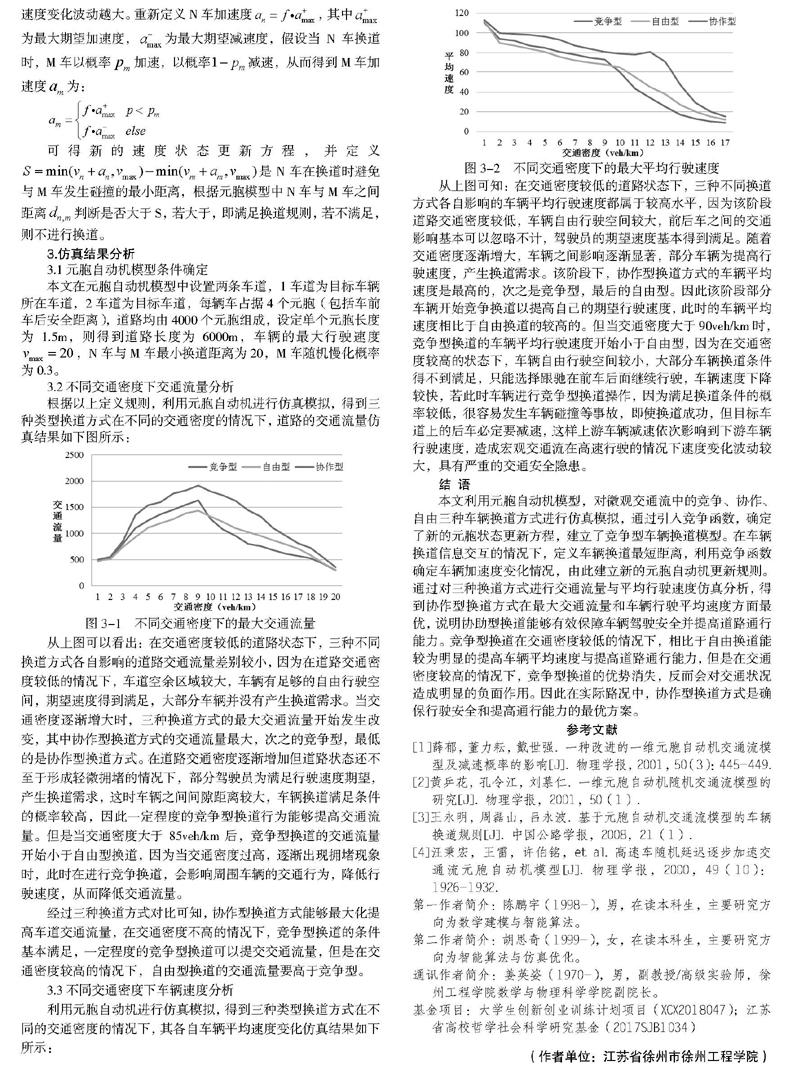
利用元胞自动机进行仿真模拟,得到三种类型换道方式在不同的交通密度的情况下,其各自车辆平均速度变化仿真结果如下所示:
从上图可知:在交通密度较低的道路状态下,三种不同换道方式各自影响的车辆平均行驶速度都属于较高水平,因为该阶段道路交通密度较低,车辆自由行驶空间较大,前后车之间的交通影响基本可以忽略不计,驾驶员的期望速度基本得到满足。随着交通密度逐渐增大,车辆之间影响逐渐显著,部分车辆为提高行驶速度,产生换道需求。该阶段下,协作型换道方式的车辆平均速度是最高的,次之是竞争型,最后的自由型。因此该阶段部分车辆开始竞争换道以提高自己的期望行驶速度,此时的车辆平均速度相比于自由换道的较高的。但当交通密度大于90veh/km时,竞争型换道的车辆平均行驶速度开始小于自由型,因为在交通密度较高的状态下,车辆自由行驶空间较小,大部分车辆换道条件得不到满足,只能选择跟驰在前车后面继续行驶,车辆速度下降较快,若此时车辆进行竞争型换道操作,因为满足换道条件的概率较低,很容易发生车辆碰撞等事故,即使换道成功,但目标车道上的后车必定要减速,这样上游车辆减速依次影响到下游车辆行驶速度,造成宏观交通流在高速行驶的情况下速度变化波动较大,具有严重的交通安全隐患。
结 语
本文利用元胞自动机模型,对微观交通流中的竞争、协作、自由三种车辆换道方式进行仿真模拟,通过引入竞争函数,确定了新的元胞状态更新方程,建立了竞争型车辆换道模型。在车辆换道信息交互的情况下,定义车辆换道最短距离,利用竞争函数确定车辆加速度变化情况,由此建立新的元胞自动机更新规则。通过对三种换道方式进行交通流量与平均行驶速度仿真分析,得到协作型换道方式在最大交通流量和車辆行驶平均速度方面最优,说明协助型换道能够有效保障车辆驾驶安全并提高道路通行能力。竞争型换道在交通密度较低的情况下,相比于自由换道能较为明显的提高车辆平均速度与提高道路通行能力,但是在交通密度较高的情况下,竞争型换道的优势消失,反而会对交通状况造成明显的负面作用。因此在实际路况中,协作型换道方式是确保行驶安全和提高通行能力的最优方案。
参考文献
[1]薛郁,董力耘,戴世强. 一种改进的一维元胞自动机交通流模型及减速概率的影响[J]. 物理学报,2001,50(3):445-449.
[2]黄乒花,孔令江,刘慕仁. 一维元胞自动机随机交通流模型的研究[J]. 物理学报,2001,50(1).
[3]王永明,周磊山,吕永波. 基于元胞自动机交通流模型的车辆换道规则[J]. 中国公路学报,2008,21(1).
[4]汪秉宏,王雷,许伯铭,et al. 高速车随机延迟逐步加速交通流元胞自动机模型[J]. 物理学报,2000,49(10):1926-1932.
第一作者简介:陈鹏宇(1998-),男,在读本科生,主要研究方向为数学建模与智能算法。
第二作者简介:胡思奇(1999-),女,在读本科生,主要研究方向为智能算法与仿真优化。
通讯作者简介:姜英姿(1970-),男,副教授/高级实验师,徐州工程学院数学与物理科学学院副院长。
基金项目:大学生创新创业训练计划项目(XCX2018047);江苏省高校哲学社会科学研究基金(2017SJB1034)
(作者单位:江苏省徐州市徐州工程学院)