智能物流机器人
2019-04-21 07:06孙鹏伟石岩石佳鹏钟学文卜秋雨孙宇捷
科学与技术 2019年6期
孙鹏伟 石岩 石佳鹏 钟学文 卜秋雨 孙宇捷

摘要:随着科技的发展,机器人在物流行业中发挥着越来越重要的作用。不同于传统的物流行业,“机器人+”物流不仅提升了仓储物流的搬运效率,减轻了人类繁重的体力劳动,还有助于优化资源,提升效益,具有广阔的发展前景和良好的经济效益。但是,传统老式物流机器人的设计大多是把夹持机构和搬运机构结合一体化,这可能会由于货物大小和形状的不同以及夹持精度的问题给夹持和搬运带来困难,因此,我们设计的这款智能物流机器人把夹持和搬运机构分成了独立的两部分,加持机构对货物进行识别分类,再由不同的搬运机构搬运到不同的目的地,实现对货物的处理。
关键词:“机器人+”;物流;夹持;搬运
一、概述
未来物流业的发展离不开机器人技术的支持。机器人技术在物流作业过程中发挥着越来越重要的作用,将成为引领现代物流业发展趋势的重要因素。
机器人技术在装卸搬运中的应用装卸搬运是物流系统中最基本的功能要素之一,存在于货物运输、储存、包装、流通加工和配送等过程中,贯穿于物流作业的始末。目前,机器人技术正在越来越多的被应用于物流的装卸搬运作业,大大提高了物流系统的效率和效益。搬运机器人的出现不仅可以充分利用工作环境的空间,提高物料的搬运能力,大大节约装卸搬运过程中的作业时间,提高装卸效率,還减轻了人类繁重的体力劳动。目前已被广泛应用到工厂内部工序间的搬运、制造系统和物流系统连续的运转以及国际化大型港口的集装箱自动搬运。[1]
根据目前市面上出现的各种物流机器人,我们知道现在物流机器人的主流都是主导搬运,没有夹持和搬运一体化的情况,因此,本文设计的是货物夹持分拣和搬运可以单独作业的机器人。
二、系统及硬件设计
本机器人主要分为夹持分拣和搬运两个部分,夹持机构以OpenMV作为货物识别的处理器,由机械臂将货物分拣;搬运机构以STM32F103RCT6单片机作为处理器,用红外传感器实现循迹导航,由超声波传感器实现避障。
(一)设计思路
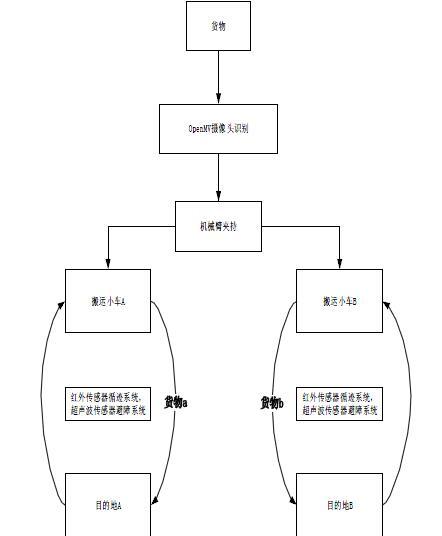
首先,夹持机构由机械臂和OpenMV及其扩展板组成,通过OpenMV摄像头对货物进行识别,控制机械臂对货物夹持,分拣到相应小车的托盘上;搬运机构由stm32单片机,电机,红外传感器,超声波传感器及小车底盘组成,通过提前规划好的路径,小车把货物搬运到相应的区域。
(二)主要模块
1.OpenMV模块
OpenMV是一个开源,低成本,功能强大的机器视觉模块。以STM32F767为核心,集成了OV7725摄像头芯片,在小巧的硬件模块上,用C语言高效的实现了核心机器视觉算法,通过其来实现对不同货物的识别及空间坐标分析,再通过与pca9685舵机驱动板相连控制机械臂夹取物体。
2.机械臂模块
采用六自由度机械臂,配置六个MG996舵机,相当于六个活动关节,实现三维旋转抓取物体,最大抓取重量500g。舵机具体参数如下:
尺寸:40.8*20*38mm
重量:55g
速度:4.8V:0.20sec/60°6.0V:0.19sec/60°
扭力:4.8V:13kg-cm
6.0V:15kg-cm
电压:4.8V-7.2V
空载工作电流:120mA
堵转工作电流:1450mA
响应脉宽时间:≤5usec
角度偏差:回中误差0度,左右各45°误差≤3°
齿轮:5级金属齿轮组
机械臂
3.单片机主板模块
基于STM32F103RCT6单片机,与转接板配合使用,具体功能特点如下:
(1)stm32主板支持USB一键下载,增加了电压自保护,防止烧坏PC端;
(2)stm32主板采用了大容量64脚STM32F103RCT6 ARM芯片,扩展出大部分的IO口和AD模拟信号端口;
(3)stm32主板与转接板很好地对接起来,通过转接板将stm32的IO口全部引出来,方便连接做实验;
4.循迹模块
采用红外传感器,基于TCRT5000红外反射传感器,传感器由红外发射二极管和红外接收二极管组成,可检测反射范围为1mm~25mm,灵敏度可调节。工作时,红外发射管不断发射红外线,当发射出的红外线没有被反射回来或反射回来但强度不够大时,红外接收管一直处于关闭状态,输出端为高电平,指示灯熄灭;当红外线被反射回来且强度足够大时,红外接收管饱和,输出端为低电平,指示灯点亮。
红外传感器
5.避障模块
采用超声波测距传感器,HC-SR04超声波测距传感器,该模块可提供2cm-400cm的非 接触式距离感测功能,测距精度可达到0.2cm,即障碍物最大检测距离为4m,精度为0.2cm,远远小于2cm;障碍物最小检测距离为2cm,满足设计要求。
超声波测距传感器
6.小车底盘模块
由1块铝合金底板,2个驱动轮,10个承重轮,两条履带,两个电机组成。
小车底盘
(二)主要功能
7.循迹
此功能主要利用红外传感器,在小车的前端左右分别一个红外传感器,两红外传感器相距的距离约等于所巡黑线的宽度。当小车被启动时,两个传感器同时开始工作,分别检测左右两边黑线的边缘,当左边的红外传感器接收不到反射回来的红外线时,说明左边的红外传感器检测到了黑线,此时单片机执行左转的程序;当右边的红外传感器接收不到反射回来的红外线时,说明右边的红外传感器检测到了黑线,此时单片机执行右转的程序;当左右两边的红外传感器都能接收到反射回来的红外线时,小车向前直走;否则,小车停下(这种情况一般不会出现),从而实现了循迹功能。
8.避障
机器人进行避障时,我们需要提前探知其前方是否存在障碍物,这样就可以在行进过程中,自动选择远离障碍物的路线。在避障模块的选择时,有两种选择,一种是使用红外避障,还有一种是超声波避障,这里我们采用超声波避障。
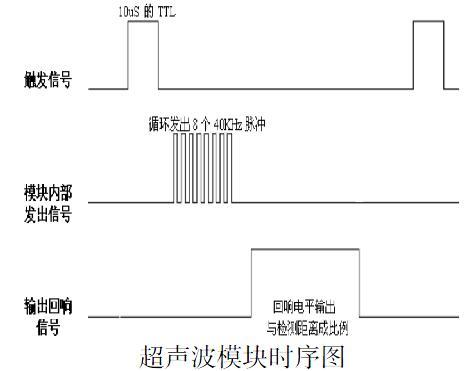
超声波避障:首先利用单片机输出一个40kHz的触发信号,把触发信号输入到超声波测距模块,再由超声波测距模块的发射器向某一方向发射超声波,在发射时刻的同时单片机通过软件开始计时,超声波在空气中传播,途中碰到障碍物返回,超声波测距模块的接收器收到反射波后通過产生一个回应信号反馈给单片机,此时单片机就立即停止计时。由于超声波在空气中的传播速度为 340m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离,即S=VT/2,通过单片机来算出距离,当达到安全距离时,开始自动避障。
3.货物识别与夹取
货物识别:
利用OpenMV机器视觉选中目标色块,将色彩格式调换为 LAB Color,记录L,A,B 三者的最大值(MAX)与最小值(MIN),将LAB的取值范围设置为阈值(threshold),将阈值传入find_blobs函数中,根据需求设定像素点与矩形面积等阈值约束,将摄像头检测到符合目标颜色阈值的部分用矩形框标识出。
货物夹取:
在进行货物识别完成后,OpenMV通过多次测量,精准获得物体位置坐标(分红色和绿色),通过逆运动学[2]得到机械臂的转动数据即各个自由度舵机转动的角度夹取物块最后将红绿物块放到不同的地方。
三、结语
本文介绍的物流机器人可以有效地提高物流效率和质量,而且对保障人身安全、改善劳动环境、减轻劳动强度、提高劳动生产率、节约材料消耗以及降低生产成本都具有十分重要的意义。
随着机器人技术不断进步和物流市场竞争的不断加剧,物流机器人在物流业中的应用范围和规模必将逐步扩大,物流机器人将更好、更高效地服务于物流业,从而促进现代物流业的快速发展。
参考文献
[1]纪寿文,李克强.智能化的物流搬运机器人.中国物流与采购设备与技术,2014
[2]周友行,何清华,邓伯禄. 一种改进的爬山法优化求解冗余机械手运动学逆解[J].机器人,2003
基金项目:本文系天津市级大学生创新创业训练项目智能物流机器人研究成果,项目编号:201810059106
(作者单位:电子信息与自动化学院 中国民航大学)
猜你喜欢
华声(2022年4期)2022-05-05
红领巾·萌芽(2022年2期)2022-01-31
中国水运(2018年6期)2018-09-04
中国水运(2017年9期)2017-09-15
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
物流技术与应用(2009年4期)2009-04-28