
利用平面特征和邻域信息改正的激光雷达形变监测方法研究
2019-04-18 01:18:44翟旭
铁道勘察 2019年2期
翟 旭
(中国铁路设计集团有限公司,天津 300251)
1 概述
国内外很多专家进行了相关研究工作,Bitelli G等利用地面激光雷达对边坡进行了多期数据获取,通过多期数据构建的DEM分析高程方向的变化并得到形变图[1];赵小平对基于地面激光雷达技术的边坡监测技术流程进行研究,并详细介绍了数据采集和数据处理过程[2];邢正全等通过叠加多期点云进行分析,实现了露天矿边坡的监测[3];侯俊岭利用地面激光雷达对铁路危岩落石勘测进行了研究,探讨了数据处理过程和地质信息的提取[4];朱雪峰利用地面激光雷达实现了危岩落石的识别和提取[5];武鹏等对地面激光雷达的标靶布设进行研究[6]。这些研究均取得了一定的成果,但在多期数据的基准统一上,一般是布设反射标靶进行测量,得到的多期点云数据之间会存在一个残余的系统误差,表现为点云间的分层,即存在残余的旋转量和平移量;同时,由于激光光斑大小和脉冲式测距方式等原因,激光雷达获取的点云中均包含点位的偶然误差[7]。利用韩三琪提出的方法[8]可以对激光雷达的单点精度进行检验,但工程中仍缺少削弱点位误差、提高单点精度的方法。因此,在考虑残余系统误差和点位偶然误差的情况下,对地面激光雷达的形变监测方法进行研究,具有一定的现实意义。
本研究的具体思路:在考虑多期数据间残余系统误差和点位偶然误差的情况下,利用多期数据稳定区域的平面特征对点云间的残余旋转量和平移量进行计算,同时利用点云的邻域信息提高点云的点位精度,最后通过隧道口岩体的监测实验验证其有效性。
2 利用平面特征和邻域信息的改正方法
2.1 残余旋转量和平移量的计算
在利用激光点云进行形变监测时,点云中既包含形变区域,同时也包含稳定区域,例如监测隧道口的山体稳定性、有支护的铁路边坡等,可以将隧道洞口和支护当作稳定区域。激光点云具有刚体性质,系统误差表现为点云的整体旋转和平移,可以通过稳定区域的平面特征来求解残余的旋转量和平移量。
可以用旋转矩阵R[9]来表示空间直角坐标系的旋转

(1)
φ,ω,κ分别为绕3个坐标轴的旋转角度。
对点云中的平面进行提取,采用稳健特征值的方法[10]对点云进行拟合,得到拟合的平面方程为
a1x+b1y+c1z=d1(2)
在第二期数据中,对与之对应的同名平面进行提取拟合,得到平面方程为
a2x+b2y+c2z=d2(3)
(a1,b1,c1)和(a2,b2,c2)即为不同期数据两个同名平面的单位法向量,则平面间的旋转可表示为
自主学习是一种学习者在总体教学目标的宏观调控下,在教师的指导下,根据自身条件和需要自由地选择学习目标、学习内容、学习方法并通过自我调控的学习活动完成具体学习目标的学习模式。自主学习是以学生作为学习的主体,在教师科学指导下又不依赖于教师而主动获取知识、整理知识、进行实验探究、进行课外研究等活动。
(4)
将式(1)的矩阵R代入到方程(4)中,对其进行线性化,采用间接平差的方法[11]即可求得φ,ω,κ的角度值,求解过程中至少需要稳定区域的3组对应平面。
在对点云间的残余旋转误差进行解算改正后,多期观测的激光点云数据中,稳定区域的同名平面应该体现为相互平行,但因残余平移量的存在,平行的平面之间存在距离差。对于残余的平移量,可将距离差分解到3个坐标轴方向;也可以对几组平面求解交点,利用交点进行残余平移量的计算。Theiler P W等的研究表明,相对于平面自身,平面的交点可靠性更高[12]。因此,本研究采用平面的交点计算点云间的平移残余量。
设场景中有3个平面N1、N2、N3,平面间彼此不平行,对拟合得到的平面方程联立求解,得到其交点坐标P(X1,Y1,Z1);在对场景的第二期测量中,用对应的平面求得交点Q(X2,Y2,Z2),即可得到残余的平移量
(5)
据此,可以对多期点云间的残余旋转量和平移量进行改正。
2.2 点位误差的削弱
由于激光的发散性,随着距离的加大,激光光斑也会变大。另外,由于脉冲式测距受到时间解码器灵敏度的限制,激光点的点位存在偶然误差,其分布表现为正态分布,具有对称性、有界性等特点。虽然激光点的单点精度受到偶然误差的影响,但点云的优势在于其密度较高,可利用其邻域信息提高点云的点位精度。刘绍堂等通过对隧道横断面进行拟合的方式研究了隧道的监测[13],Liu C等根据铁轨的几何形状,采用拟合的方法研究轨道的几何变形[14]。拟合是一种非常有效的方法,但需要被监测目标具有规则的几何形状。对于隧道口的山体或铁路的边坡,无法用一个确定的数学方程进行描述,基于激光点云高密度的特点,在一定范围的邻域内,激光点可以认为具有一定的同质性。因此,本研究采用的算法是在激光点的邻域内求取重心。
由于点云数据无序散乱等原因,无法直接对激光点的k邻域进行查找,必须首先建立点云的空间数据结构。kd-tree是一种有效分割k维数据空间的数据结构[15],首先对点云数据建立kd-tree的数据结构,对每个激光点的k邻域进行搜索,然后以邻域内的重心点代替原始激光点。该方法要求点云具有较高的点密度。
2.3 形变提取方法
在对两期数据的残余系统误差进行改正并且求取重心点之后,需要对两期数据间的变化进行提取。首先对两期数据中一期数据构建TIN,然后计算另一期数据每个激光点到TIN三角面片的法向距离,以这个距离来反映两期数据间的变化,采用分级颜色进行结果显示。
3 实验分析
实验数据为Riegl LMS-Z620仪器扫描得到的一处隧道洞口山体数据,数据采集时点间隔设置为1 cm,连续采集两期数据,两期点云的整体情况如图1所示。
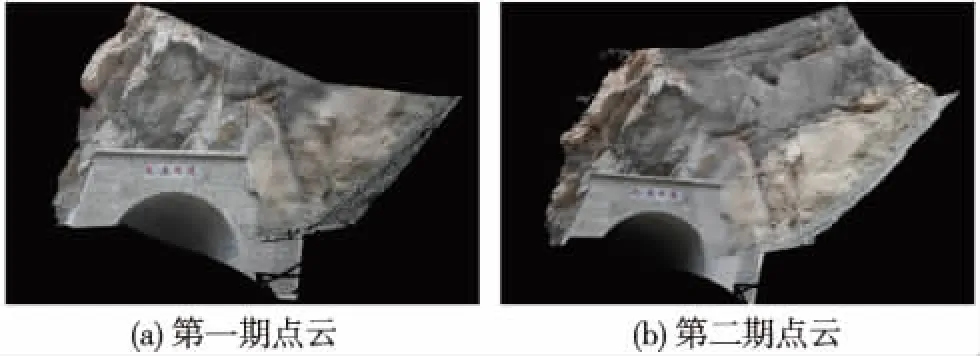
图1 两期点云整体情况
为了验证方法的有效性,在如图2所示区域沿表面的法方向人为地对第二期数据添加5 cm、3 cm、2 cm模拟形变。
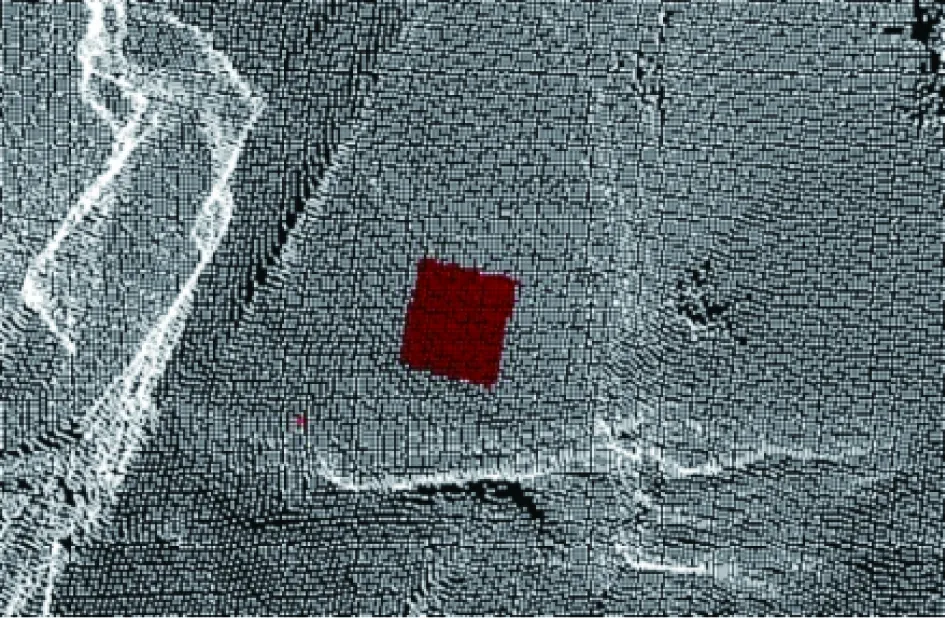
图2 模拟形变区域
考虑到隧道口岩体监测主要为监测岩体相对隧道的变化,因此认为洞口为稳定区域,提取隧道洞口的平面特征(如图3所示)。

图3 提取的平面特征
将提取出来的平面点云按稳健特征值的方法进行拟合,然后按2.1中的方法进行旋转和平移计算改正。之后利用kd-tree空间索引计算重心坐标,减小偶然误差的影响。形变提取得到的形变量如图4所示。

图4 形变量
如图4(a1)、图4(a2)、图4(a3)所示,除形变区域外,整体表现为淡黄色量级的形变,表明其受到了残余系统误差的影响;在系统误差改正后,如图4(b1)、图4(b2)、图4(b3)所示,淡黄色量级的形变被消除,但有明显的噪声影响;在计算重心之后,如图4(c1)、图4(c2)、图4(c3)所示,形变结果基本与模拟的形变一致。
对形变量作分布直方图(如图5所示)。

图5 分布直方图
直方图中包含两个特征的分布,无形变区应表现为均值为0的正态分布,形变区应表现为均值为模拟形变量的正态分布;如图5(a1)、图5(a2)、图5(a3)所示,其中一个分布的均值在0的左侧,也就是无形变区出现了一个系统误差;在改正系统误差后,如图5(b1)、图5(b2)、图5(b3)所示,无形变区分布的均值为0;如图5(b3)所示,形变区的分布基本被另一个分布淹没,表明其受到了偶然误差的影响;在削弱偶然误差之后,如图5(c1)、图5(c2)、图5(c3)所示,分布直方图变瘦,偶然误差明显减小,避免了形变被偶然误差掩盖。
对提取的形变区做统计,计算均值和标准差如表1所示。
如表1所示,在系统误差没有改正时,提取的形变量比模拟值小,在5 cm、3 cm、2 cm模拟形变下,提取形变量与模拟形变量的差值分别为0.76 cm、0.70 cm、0.70 cm,存在一个系统差值;在系统误差改正后,提取形变量与模拟形变量的差值分别为0.09 cm、0.04 cm、0.11 cm,系统误差分别改正了0.67 cm、0.66 cm、0.59 cm,改正量达到了88%、94%、84%。

表1 形变量统计值 cm
对比形变量的标准差发现,在未计算重心时,5 cm、3 cm、2 cm模拟形变下,形变量标准差分别为0.71 cm、0.71 cm、0.68 cm,在计算重心后,形变量标准差分别为0.29 cm、0.32 cm、0.27 cm,精度分别提高了2.4倍、2.2倍、2.5倍。
4 结论
在考虑多期数据间残余系统误差和点位偶然误差的情况下,对地面激光雷达的形变监测方法进行了研究。针对残余系统误差,利用稳定区域的平面特征进行计算改正;针对点位的偶然误差,采用搜索k邻域计算重心的方法进行改正。最后,以某隧道口岩体监测实验为例进行分析,统计提取形变的均值和标准差,研究表明,该方法对系统误差的改正量为80%以上,并可将形变提取精度提高2倍。
猜你喜欢
北京测绘(2022年5期)2022-11-22 06:57:43
汽车观察(2021年8期)2021-09-01 10:12:41
吉林大学学报(理学版)(2020年3期)2020-05-29 06:32:16
中国交通信息化(2019年1期)2019-03-26 06:43:46
电子制作(2018年16期)2018-09-26 03:27:00
自动化学报(2018年7期)2018-08-20 02:59:04
北京航空航天大学学报(2017年4期)2017-11-23 05:48:25
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
周口师范学院学报(2016年5期)2016-10-17 06:36:47
系统工程与电子技术(2016年7期)2016-08-21 13:58:58
