
基于数组变化的单车道车流量检测系统
2019-04-12 00:00:00闫旭刚李博
现代电子技术 2019年21期





摘" 要: 针对现行的基于背景差分法计算的停车场车流量检测系统在特殊情况下容易出现误判,准确率不够高的问题,拟通过对比车辆差异、易引起误判因素间的异同,改进系统算法,利用矩阵中数组的变化规律过滤干扰因素,使系统提高识别率,只针对进出车辆执行操作,从而提高准确率。经过反复实验,改进后系统的准确率接近100%。
关键词: 背景差分法; 数组变化; 车流量; 检测系统; 虚拟检测带; 算法改进
中图分类号: TN911.73⁃34; TP391" " " " " " " " " "文献标识码: A" " " " " " " " " 文章编号: 1004⁃373X(2019)21⁃0049⁃04
Abstract: The accuracy of available parking lot traffic flow detection system based on background difference method is not high, and it is easy to misjudge in special circumstances. In order to make the system only perform operation for inbound and outbound vehicles while ignoring other interference factors to improve the accuracy of system judgment, the system is used to compare the similarities and differences between vehicles and special factors that can easily lead to misjudgment and improve the system recognition rate. The analog signal is digitized and the interference signal is filtered by using the variation of the array in the matrix. The results of the repeated experiments indicate that the accuracy of the improved system is close to 100%.
Keywords:" background⁃difference method; array change; traffic volume; detection system; virtual detection band; algorithm improvement
0" 引" 言
随着计算机视觉技术的不断发展,基于DSP处理视频的车流量检测技术广泛应用于智能交通系统[1]。本文所研究的检测系统采用TMS320DM642作为数据处理总控制器,通过摄像头采集信息。为了降低运算量,保证实时性的同时保证准确性,实际中抽取视频的一部分作为虚拟检测带,在虚拟检测带上提取运动区域完成车辆的检测。
背景提取是在视频图像序列中提取出场景中静止不动的事物,背景提取的目标就是找出图像中每一点的背景值。由于摄像机不动,因此图像中的每个像素点都有一个对应的背景值,在一段时间内,这个背景值是比较固定的,但是为了确保准确性还是要在一定的时间内周期性地重复背景提取。
背景提取算法有很多,如帧间差分法[2]、高斯背景差分法、背景差分算法,还有针对运动摄像机的光流法[2⁃4]等。其中,基于背景差分法的车流量检测算法具有快速高效的特点,可以让车辆在进入停车场时就对场内各停车区域的情况一目了然,有利于节省成本提高效率,从而取代传统的传感器指示灯的检测系统,被广泛应用于停车场[5]判断停车位的使用和分布情况。
1" 背景差分法
在视频图像中截取一帧,假设该图像中的一个像素点[(x,y)]的当前像素灰度值记为[Fk(x,y)],背景像素的灰度值记为[Bk(x,y)],得到背景差分方程如式(1)所示:
为了提取出运动区域,需要将差分后的像素灰度值二值化:
由式(2)可知,当背景差值[Dk(x,y)]大于阈值[T]时,点[(x,y)]为运动点,将[Mk(x,y)]赋值为1,该点在图像上显示为白色。当背景差[Dk(x,y)]小于阈值[T]时,该点视为背景点,将[Mk(x,y)]赋值为0,在图像上显示为黑色。通过这种方法可以直观地提取出运动区域。经过大量的实验测试,本文中阈值[T]取为30能最大限度地避免随机噪声的干扰。
在背景差分法基础上改进的均值背景建模法[6⁃7]能够降低运算量,保证系统的实时性。提前选取一个没有运动车辆的图像作为初始背景,实时截取的图像帧[Ik(x,y)]与背景帧[B1(x,y)]的差值为[Ik(x,y)- B1(x,y)]。将[Ik(x,y)- B1(x,y)]与阈值[T]比较,判断前景点和背景点:
式中[Dk(x,y)]为背景点与前景点判别值。若是前景点,则不用更换背景点;否则就要用均值法更新参考模型。
在DSP处理数据时,截取其中一条检测带进行,可以较好地减少运算量以确保算法的实时性。本文采用一个10×100个像素的虚拟检测带完成车辆的检测及单车道车流量的计数工作。
将检测带看作是10×100个元素的矩阵:
2" 车辆出入库判断
为方便研究,将检测带的矩阵[A]划分为10行,每行都是一个一维数组[a]。记为[a[i]],[i]=1,2,…,10,[a[i]]表示第[i]行的状态。[Pi]表示第[i]行中经过背景差法二值化后白色像素点的个数,即前文[Mk(x,y)]为1的个数。当第[i]行中白色像素点个数大于阈值[T]时,该行表示值[a[i]]为1,否则为0。
各行元素相互独立。经过式(4)运算后,此时检测带内像素变化情况便可以用只有0和1组成的数组[a[i]]代替。
车辆入库依次经历的状态如图1所示。由图1可知,车辆入库要依次经历状态1→状态2→状态3。整个过程是连续的。
在车从状态2变为状态3的过程中,此时数组[a[i]]的变化为:
相反,出库时要经历状态3→状态2→状态1。
根据此规律可知,单车道情况下可以通过判断[a][1]和[a][10]谁先由0变为1就可以得出车辆是驶入还是驶出。若[a][1]先由0变为1,则为入库;若[a][10]先由0变为1,则为出库。
3" 利用矩阵数字变化排除干扰
改进算法的目的是让系统仅对进出车辆起作用,识别并忽略在特殊情况下表现出符合车辆特性的非车辆物体,从而提高准确性。特殊情况包括在镜头的适合距离晃动手掌、数人并排经过检测带等。
没有车辆经过检测带时,矩阵[A]为10×100的零矩阵。有车辆穿过检测带时,矩阵[A]中每一行中都有0元素变为1,并且1和0的排列规律如下:
1) 每一行中1在中间,0在两侧。
2) 1和0不会穿插排布。
矩阵[A]的每一行组成的数组[b[i]],[i]=1,2,…,10,1的个数记为num[[i]],[i]=1,2,…,10,则0的个数为100-num[[i]]。
正常情况下,车的形状不会变化,而且宽度和长度是固定的。车辆是垂直穿过检测带的,这种情况下,检测带的变化区域是矩形,如图2所示。
特殊情况下,车辆和检测会有一个微小的偏差角度穿过检测带。这种情况下,检测带的变化区域是平行四边形,如图3所示。
当在距离镜头合适位置晃动手掌时,检测带受影响的区域是不规则的,不可能形成矩形或者平行四边形,从而在实际运用中被排除干扰。所以当[num[i]-num[j]lt;f],[i,j]=1,2,…,10,[f]是阈值时,可以认定不是外界干扰。
当几个人经过镜头时,检测带受影响的区域是不连续的,所以可以通过判定数组中的num[[i]]的排列规则来排除这种干扰。
同时现实生活中,通用车辆的宽度均保持在一定的范围内,比如1.5~2 m,所以根据停车场摄像头安装的具体情况,可通过实验来确定数组中num[[i]]的范围,以提高准确度。
4" 实验结果与分析
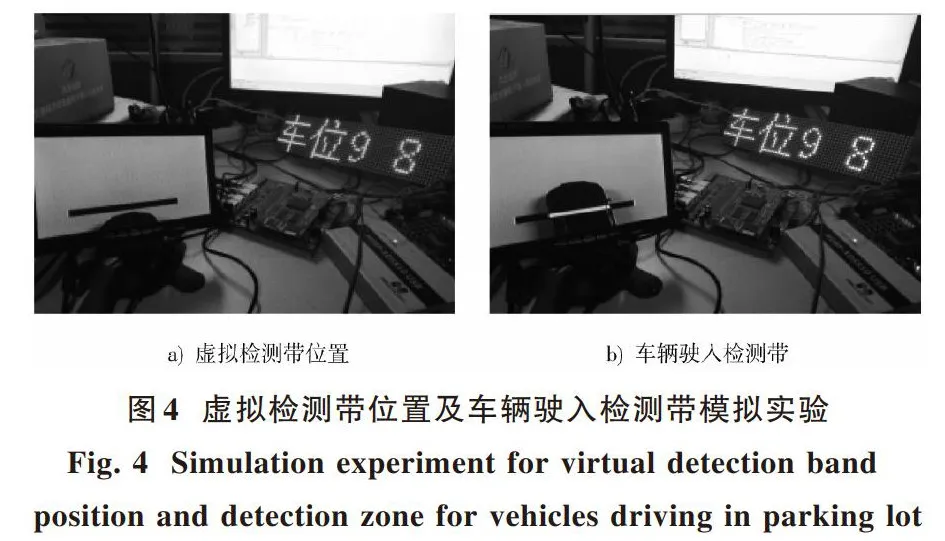
4.1" 模拟实验
在实验室内用模拟单车道车流量测试,如图4所示。
4.2" 真实环境实验
对停车场不同车速下该算法检测的准确性做了实验,如图7所示。
结果显示,车速控制在5 km/h以内基本不会出现漏检,准确率较高;车速在5 km/h以上10 km/h以下,准确率能保持在95%以上。另外,经过大量的对比实验发现,车身颜色对检测的准确性影响特别大。车身的颜色越深,检测的准确率越低。
5" 结" 语
综上,本文提出的改进的新算法有利于提高系统检测的精确度,但是对于由车身颜色带来的误判还需要进一步改进,这是下一步的研究方向。
参考文献
[1] 王振亚,曾黄麟.一种基于帧间差分和光流技术结合的运动车辆检测和跟踪算法[J].计算机应用与软件, 2012,29(5):117⁃120.
WANG Zhenya, ZENG Huanglin. A new algorithm of moving vehicle detection and tracking based on combining" frame" difference method with optical flow technique [J]. Computer applications and software, 2012, 29(5): 117⁃120.
[2] 卢章平,孔德飞,李小蕾,等.背景差分与三帧差分结合的运动目标检测算法[J].计算机测量与控制,2013,21(12):3315⁃3318.
LU Zhangping, KONG Defei, LI Xiaolei, et al. A method for moving object detection based on background subtraction and three⁃frame differencing[J]. Computer measurement amp; control, 2013, 21(12): 3315⁃3318.
[3] 王效文.基于光流法的车辆检测与跟踪[D].镇江:江苏科技大学,2015.
WANG Xiaowen. Vehicle detection and tracking based on optical flow [D]. Zhenjiang: Jiangsu University of" Science and Technology, 2015.
[4] 吴亚斌,陈淑荣.一种基于监控视频的车型识别和车流量检测算法[J].微型机与应用,2015,34(7):45⁃48.
WU Yabin, CHEN Shurong. A vehicle identification and traffic detection algorithm based on surveillance video [J]. Microcomputer amp; its applications, 2015, 34(7): 45⁃48.
[5] 金华强.基于AMR传感器的车位监测系统的设计与实现[D].杭州:浙江工业大学,2012.
JIN Huaqiang. Design and implementation of parking spaces monitoring system basedon AMR sensor [D]. Hangzhou: Zhejiang University of Thechnology, 2012.
[6] 杨婷,李博,石雯婧,等.基于DSP的单车道车流量实时监测算法[J].计算机应用,2017,37(2):593⁃596.
YANG Ting, LI Bo, SHI Wenjing, et al. Real⁃time vehicle monitoring algorithm of single⁃lane based on DSP [J]. Journal of computer application, 2017, 37(2): 593⁃596.
[7] 杨婷.停车场车流量视频检测关键技术研究与应用[D].太原:中北大学,2017.
YANG Ting. The research and application of the key technologies for traffic flow video detection in parking lot [D]. Taiyuan: North University of China, 2017.
[8] 王骁,李博,张硕.基于DSP的地下停车场车流量视频检测的改进算法[J].电子器件,2016,39(3):741⁃745.
WANG Xiao, LI Bo, ZHANG Shuo. An improved DSP based on algorithm for underground parting lot traffic flow detection [J]. Chinese journal of electron devices, 2016, 39(3): 741⁃745.
[9] 薛茹,宋焕生,张环.基于像素的背景建模方法综述[J].电视技术,2012,36(13):39⁃43.
XUE Ru, SONG Huansheng, ZHANG Huan. Overview of background modeling method based on pixel [J]. Video engineering, 2012, 36(13): 39⁃43.
[10] 杨宇腾.基于背景差分与虚拟区域融合的视频中车流量统计的方法[D].昆明:云南大学,2015.
YANG Yuteng. The method of combined the background difference method and video traffic statistical region merging based on virtual [D]. Kunming: Yunnan University, 2015.
