美陆军航空兵直升机航电系统智能化应用研究
2019-04-10 09:28罗雪丰
直升机技术 2019年1期
罗雪丰
(中国直升机设计研究所,江西 景德镇 333001)
0 引言
美陆军航空兵典型空中突击编队装备包括“黑鹰”指挥直升机、“阿帕奇”武装直升机、“基奥瓦”武装侦察直升机。随着“基奥瓦”武装侦察直升机的逐步退役,其在美陆军航空兵中的作战角色被无人机替代。其中,师级及以上无人机部队使用远程长航时无人机;旅级及以上无人机部队使用“猎人”和“影子”等近程中航时无人机。
编队协同突击中,“长弓阿帕奇”武装直升机在极紧张的高速、低空/超低空飞行的同时还需要执行各种各样的作战任务。如何降低此种状态下“阿帕奇”机组的工作负荷,同时提升态势感知能力和即时反应能力,成为美陆军航空兵直升机装备发展的重要研究课题;而“黑鹰”指挥直升机也需要提升编队态势融合与共享以及任务指挥决策能力。其攻关的关键点在于改善机组读取与吸收战场情报的效率,主要有两条途径:一是从改善座舱的信息显示与操作接口效率着手;二是通过引进智能化技术和辅助决策系统来减轻乘员负担。
为了解决上述问题,美国从20世纪80年代开始,进行了长期的理论研究和工程技术开发。本文论述了美陆军航空兵重点研究的三项直升机航电系统智能化关键技术,以及这些关键技术在典型直升机装备和编队体系协同中的应用情况。
1 直升机航电系统智能化关键技术
空中突击过程中,全面感知掌握编队周围、交战区域或指定地点态势,是整个作战行动的基础。态势感知能力的提升依赖于两个方面:首先是硬件设施升级,主要包括直升机传感器探测能力和互联互通网络等的更新换代;此外还可利用智能化技术进一步提升态势感知能力,涉及到三项关键技术:
①多源传感器数据融合技术——改善航电系统信息汇整处理、融合与呈现的能力,让机组乘员能更清晰、便利地读取与理解传感器获得的复杂信息,以便应对周围情况的变化,迅速做出适当的反应;
②智能体数据挖掘和分发技术——旨在扩大直升机编队协同感知能力,主要通过战术网络广泛地取得友军平台传感器获得的信息或指挥中心数据库信息支援,来弥补单一平台信息感测能力的不足;
③辅助决策技术——通过提升装备自动化程度,降低飞行员工作负荷,提高即时反应和快速攻击能力,为陆军航空兵空中和地面指挥官提供更好的作战支撑。
1.1 多源传感器数据融合技术
多源传感器数据融合技术的目标是通过实时融合本机和它机等多源传感器信息,在编队内形成统一的战场态势场景图像。美国洛·马公司从20世纪90年代初开始开展数据融合技术工程研发。1993年至1999年,洛·马公司的先进技术实验室作为陆军旋翼机驾驶员助手先进技术演示验证项目的二级分包供应商,负责开发多源传感器融合系统,给飞行员和辅助决策系统提供通用融合航迹图像[1]。该数据融合系统最大可接入200个作战单元、14种不同类型的机载或地面传感器数据,并进行关联和融合,形成统一的综合态势画面。数据融合系统于1999年在AH-64D上成功试飞验证。
多源传感器数据融合内核软件架构见图1所示,由5个主要部件组成:融合分发模块、融合控制模块、融合算法内核、航迹管理模块、输入输出接口模块。融合分发模块和融合控制模块根据输入数据类型调用对应的融合算法内核和计算资源;融合算法内核是对输入航迹数据进行关联、融合处理的关键过程,每个融合内核算法不同,但都遵循同样的处理步骤(见图2);航迹管理模块存储所有航迹数据,保持融合内核输出的航迹之间的连续性关系。
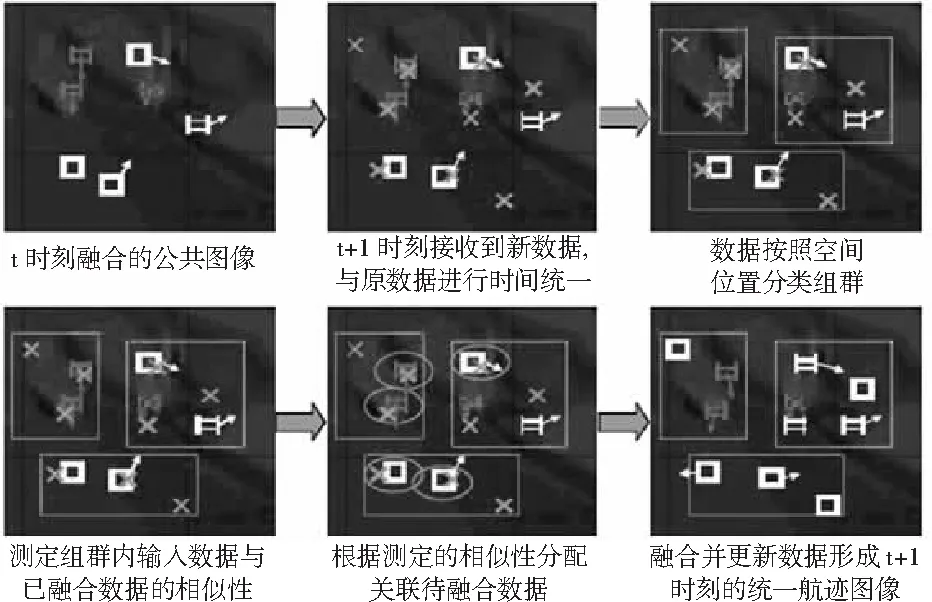
图2 数据融合内核通用处理过程(以移动目标航迹融合为例)
输入模块管理与传感器或其他数据输入源的接口匹配,并对数据进行预处理转换为内核可计算处理的通用格式。输出模块将融合后的航迹数据根据后续使用需求进行消息格式转换后输出,输入输出接口模块数量均可根据特定应用平台配置裁剪。
1.2 智能体数据挖掘与分发技术
1995年,洛·马公司的先进技术实验室开始研究智能体数据挖掘与分发技术[2]。“黑鹰”指挥直升机配装的智能体数据挖掘软件交联架构见图3所示,负责从“黑鹰”指挥直升机上的陆军作战指挥系统中通过搜索、修正和用户请求等智能体代理来识别、定位和重现战场机动指挥官助手所需的数据。陆军作战指挥系统的联合公共数据库存储了敌我双方的战场作战力量数据以及指定区域、交战区域、直升机航线等监控数据,作战指挥系统中的另一个模块—在线反馈服务器则存储了友、敌机动部队的实时数据。

图3 “黑鹰”指挥机基于智能体的数据挖掘应用架构
在机动指挥官助手辅助软件内部,智能体数据挖掘模块的作用是使用软件智能体从数据融合模块、决策辅助软件模块、Link16模块获取信息,以支撑编队成员之间的信息互操作,包括:数据共享分发、数据挖掘获取、监控驻留应用中的关键信息,监控特定事件(如指定区域、友邻位置附近、敌方位置发现威胁后)并在其发生时向飞行员发出警报等(见图4示例)。
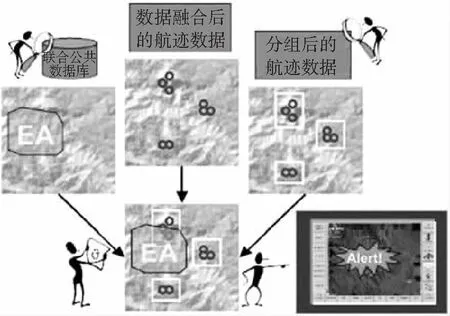
图4 智能体对交战区域的持续监控与威胁报警
为了在有限带宽下高效共享信息,向友邻节点发送信息需求以便友邻节点有选择性地发送对应数据。洛·马公司的先进技术实验室开发的“葡萄藤”架构分发技术,用于通过传感器数据共享,使编队内乘员能获得尽可能完整的统一战场态势图像。
如图5所示,“葡萄藤”数据分发架构以数据融合系统为基础,架构中的每个节点都包含数据融合模块融合本机和它机数据,每个节点的“葡萄藤”管理器管理与友邻节点的数据交互操作。消息需求智能体代理在对比本机融合数据能力和信息需求后,向某个友邻节点提供本节点能支撑满足的信息需求。
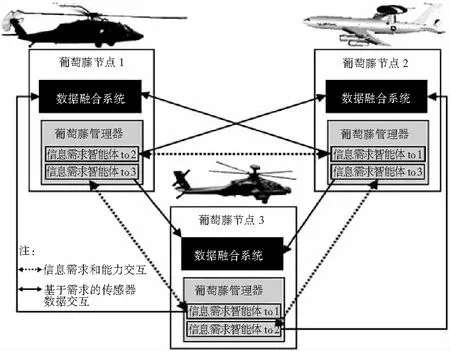
图5 “葡萄藤”数据分发架构
1.3 辅助决策技术
为了降低人力操控的工作负荷以及寻找提高航空器自主程度和控制精准度的技术,面向航空器应用的辅助决策技术基础理论研究从20世纪80年代开始,主要基于认知理论来设计相应的人机交互和协同系统,从而更有效地完成各种战术任务。工程技术开发层面主要是认知决策辅助系统的研发和持续完善。
1.3.1 人工认知系统理论研究和仿真
1986年,Rasmussen提出了认知系统工程方法[3],被广泛应用到人机界面架构设计中,解决了人机交互过程中需求与认知资源调动之间的匹配问题。这套方法后来成为了构建各种自动化系统认知过程设计的理论基础。1987年,Newell基于人工智能与专家系统理论提出了Soar通用智能架构模型。以Soar认知理论为基础构建的机器认知架构,简化了系统执行先验指示的过程,减少了系统对处理特殊知识所需的建模需求。
1996年,德国联邦国防大学面向有人无人混合编队协同应用开展了基于人工认知单元辅助决策的仿真应用研究。试验结果表明人工认知单元知晓在何时需要对飞行员进行支持,可在认知层面进行有效的人机协同。
1.3.2 认知决策辅助系统
认知决策辅助系统是旋翼机驾驶员助手(见图6)的核心组件,主要包括6个模块[4]:①融合模块将多个输入通道的数据融合为统一、精确的战场态势图像;②外部态势评估模块由战场和目标评估子系统合理理解任务目标的外部条件约束;③内部态势评估模块监控直升机健康状态和机载系统状态;④六个实时规划器根据评估数据提供成功完成任务的建议,每个规划器负责一项功能:航线规划、生存力(威胁评估与规避路线)规划、通信管理、传感器管理、攻击和侦察;⑤座舱信息管理是旋翼机驾驶员助手和认知决策系统的用户界面模块;⑥认知决策和任务处理模块。

图6 旋翼机驾驶员助手软件架构
早期的认知决策辅助系统功能比较偏向于自卫电子战系统应用的相关辅助决策,可视为“阿帕奇”武装直升机自卫电子战系统后端的整合支持系统。可针对一些预设的作战情境,自动做出适当的判断与行动选择,若飞行员同意,还能自动执行行动方案,从而为飞行员省下大量的决策时间与工作负担。待威胁解除后,又会自动将机体带回原先任务的飞行路径上。
在“阿帕奇”武装直升机最新型号中升级后的认知决策辅助系统能够进行精确的威胁杀伤力评估,并据此提前规划威胁规避航线,或者协同编队自主感知、开火、完成攻击后的规避,以减少各平台设备的人工操控和加载时间。
2 直升机装备智能化应用情况
2.1 单机装备应用
2.1.1 AH-64D Block II地面火力捕捉系统
美国陆军从2011年起展开地面火力捕捉系统在“阿帕奇”上的小规模试验部署,在2012年完成了1个AH-64D Block II营的配备,随后将该营部署到阿富汗进行实战测试。该系统是一套用于定位地面射击火力位置的信息融合系统。
在AH-64D Block II上,地面火力捕捉系统以吊舱方式安装在两侧短翼翼梢上,吊舱设有多组宽带中波红外传感器,每个吊舱可涵盖120°方位,通过捕捉枪支、火箭或迫击炮等地面武器射击时的枪/炮口闪焰,来定位射击火力来源初次开火的位置。地面火力捕捉系统传感器获得的图像信息先由一套处理器进行图像筛选处理,判定射击闪焰来源方位,并通过对比地面射击信号闪焰特性来识别武器的种类(通过数据库比对,判别该信号属于机枪或RPG等不同类型)。然后通过另一套机载处理器,整合来自机载自卫电子战系统与M-TADS指示系统的数据后反馈到AH-64D Block II的多功能显示器上显示。也就是说“阿帕奇”可在对方进行第2次攻击前便依照融合后的数据指示立刻发动反击。
2.1.2 旋翼机驾驶员助手
旋翼机驾驶员助手演示验证项目[4],由美国陆军应用技术处组织,麦道直升机总承包,洛·马、Loral联邦系统公司、霍尼韦尔公司分包完成工程研制工作。项目于1993年启动,1999年在“阿帕奇”直升机上试飞演示成功。
该项目旨在开发与演示攻击侦察直升机飞行过程中的“助手”系统——部分取代人类行为能力的智能辅助系统,可以:①扮演此领域专家相同的角色;②通常情况下按照人的决策行动,必要时可主动实施;③整合正在进行的活动以展现更好的协同能力。旋翼机驾驶员助手的关键目标是能自动管理直升机上的信息,减轻机组负荷的同时提升态势感知能力。旋翼机驾驶员助手的总体架构包括两个主要部件:先进任务传感器组、认知决策辅助系统(见图6)。
2.1.3 战斗助手和机动指挥官助手
战斗助手辅助软件[5]由波音公司在机载有人无人技术、“猎人”远距离杀手编队演示验证项目期间开发,以驾驶员助手系统技术成果为基础,通过进一步提高有人直升机飞行员的态势感知能力来增强攻击机(如“阿帕奇”)的生存能力。战斗助手主要处理操作量密集的任务,使飞行员集中于作战规划和战术运用之类的高层次任务上,由下列模块组成:①航路规划器;②航路评估器;③火力攻击规划器;④数据融合;⑤传感器覆盖与监视;⑥无人机控制;⑦机载视频记录器与图像收发机。
同样以驾驶员助手技术成果为基础,为“黑鹰”指挥直升机、无人机协同作战能力开发的机动指挥官助手辅助软件[2]通过对机内外多源传感器信息的综合处理,生成统一战场态势,并自动根据相关的作战规则完成在线任务规划,然后发出提示辅助飞行员高效完成任务。其关键在于对有人直升机上无人机操作人员的决策支援、数据融合和智能数据挖掘,以及控制和显示子系统。与战斗助手的不同之处在于,机动指挥官助手软件具备更强的数据链互联管理和更多的数据源输入接口能力、更强的分布式数据融合能力、智能体数据挖掘能力、更好的编队管理/航路规划与监控能力。
2.2 协同编队应用
陆军航空兵采用编队协同作战方式,把“黑鹰”直升机、武装直升机、无人机混合编队协同。智能化技术在协同编队中的体系化应用将给机动指挥官提供更好的态势感知能力,包括:编队共享态势感知、编队辅助决策。
2.2.1 编队共享态势感知架构
如图7所示,“黑鹰”指挥直升机配装智能体数据挖掘模块、多源数据融合模块、“葡萄藤”信息分发模块;“阿帕奇”武装直升机配装多源数据融合与“葡萄藤”信息分发模块。配装长弓雷达的“阿帕奇”直升机在本机数据融合后通过情报信息分发模块与“黑鹰”指挥直升机交换信息;配装有人无人协同数据链组件的“阿帕奇”还可接入无人机传感器数据,融合后再与“黑鹰”指挥直升机交换信息。通过共享与融合战场上所有的传感器信息和情报数据源信息形成统一的战场态势图像,来提供混合协同编队机上和地面机动指挥官的态势感知能力。
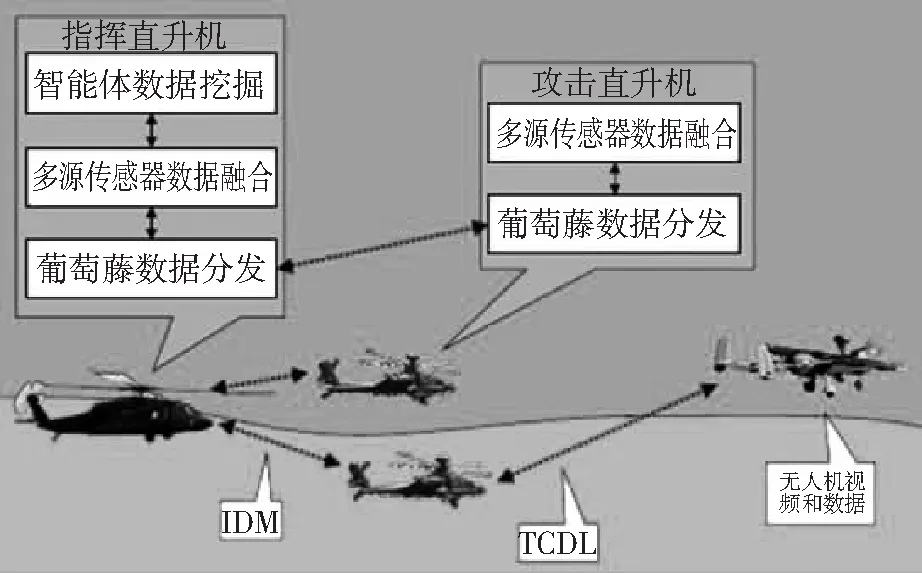
图7 有人直升机与无人机混合编队共享态势感知架构
2.2.2 编队辅助决策架构
如图8所示,在统一的战场态势图像情报的基础上,战斗员助手为“阿帕奇”飞行提供航线规划和攻击支撑;移动指挥官助手决策辅助技术为编队指挥官提供了态势感知显示、无人机管理、协作小组管理、航路管理、传感器管理和通信管理等功能。
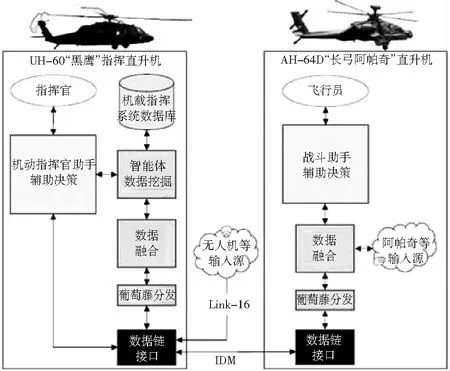
图8 “黑鹰”指挥机与“阿帕奇”武装直升机编队辅助决策架构
4 结束语
智能化辅助技术在人机协同与体系化编队作战方面具有非常好的应用前景。飞行员面对简单刺激通常需要较长的反应时间,智能化辅助技术在直升机航电系统中的应用可压缩陆军航空兵作战人员在观察、定向、决定、行动(OODA)循环中的时间。人与机器智能的结合,将全面提升OODA环的运行速度和运行质量;通过这些技术的充分利用,将实现陆军航空兵混合编队协同作战效能的提升,从而构建赢得未来战争的信息机动优势。
猜你喜欢
环球时报(2022-09-15)2022-09-15
军事文摘(2022年15期)2022-08-17
阅读与作文(小学低年级版)(2016年3期)2016-03-08
少儿科学周刊·儿童版(2015年2期)2015-07-07
少儿科学周刊·儿童版(2015年2期)2015-07-07
第二课堂(小学版)(2009年9期)2009-11-13
幼儿智力世界(2004年7期)2004-08-29
航空知识(2001年5期)2001-06-12