
隼鸟2号:一帆风顺抵“龙宫”
2019-04-09 02:36迟惑
太空探索 2019年2期
文/迟惑
日本是一个对航天探索非常积极的国家,在小行星探测这个问题上,虽然美国人的调门非常高,但实际上远远走在前面的却是日本。早在本世纪初,日本就发射了隼鸟1号小行星探测器,历经千辛万苦,终于从糸川号小行星上带回了珍贵的岩石样本。受到这次成功的鼓舞,日本在2014年前又发射了隼鸟2号小行星探测器。这次的目标不再是糸川,而是龙宫小行星。按计划,它将通过“炮击”的方式在“龙宫”实施采样并返回地球(这一采样方式将在后文详述)。因为有前一次成功的经验教训,因此“隼鸟2号”的任务到目前为止执行得很是顺利。2018年7月,“隼鸟2号”成功抵达了龙宫小行星附近,开始了科学探索任务。
或许是因为日本没有载人航天能力,也或许是因为日本航天的调门不高,所以人们对这颗小行星以及隼鸟2号探测器的成绩并不是太重视。在这里我们就把这个不应该受到忽视的探测器详细介绍一下。
“龙宫”是颗什么小行星

▲ 龙宫小行星外观
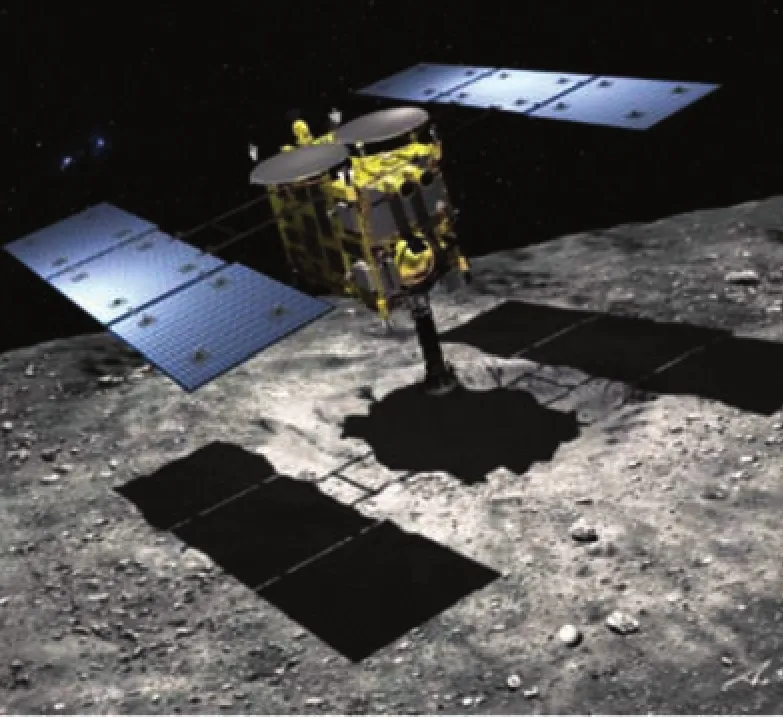
▲ “隼鸟2号”的外形
“龙宫”是一颗接近于正方形的C类小行星,编号是1999JU3。它的对角线长度大约是900米,有7小时38分的自转周期。C类的意思是可能含有水合化合物,如果确认了这样的推测,它们就能成为未来人类在宇宙中的水库和养料库。“龙宫”的质量达到1.7×108~1.4×109吨,哪怕只有百万分之一的含水量也能为人类提供百吨规模的水资源。这在宇宙中是极为宝贵的。
龙宫小行星是1999年5月由美国人发现和确认的。日本宇宙航空研究开发机构(JAXA)在为“隼鸟2号”选择目标的时候。提出了几个原则。第一,轨道必须在地球和火星之间,便于探测器的轨道控制。第二,自转周期必须大于6小时,转得太快的小行星不容易降落。第三,直径在数百米级别,这样采样时容易瞄准。第四,用“隼鸟2号”携带的燃料能飞一个来回,所以这颗小行星的公转轨道面和地球公转轨道面的夹角不能太大,降低对变轨速度增量的需求。经过反复筛选,“龙宫”被确定为探测的对象。
按照JAXA的说法,“隼鸟2号”的具体任务有四项,分别是两项科学任务和两项工程任务。
其中,科学任务的第一项是研究太阳系演变过程中各种物质是如何变化的。在“龙宫”这样的C型小行星上,人们可能会发现一些独特的信息,尤其是矿物质水和有机物之间的相互关系。第二项科学任务是发现行星演变过程的秘密,这需要对“龙宫”的内部结构和浅地表物质进行研究。
工程上的两项任务是:第一,“隼鸟1号”的基础上进一步完善深空采样返回技术,提高鲁棒性、稳定性和可操作性。第二,验证“小型便携式冲击器”技术。第二项听起来让人有点费解,我们会在后文中进行详细的论述。

▲ “隼鸟2号”的离子发动机
全副武装的“隼鸟2号”
和各种深空探测器一样,“隼鸟2号”身上也装满了各式各样、花里胡哨的设备。这并不仅仅因为JAXA秉承了日本人喜欢小而全的天性,更是因为向深空目标发射一颗探测器的机会实在是太难得了,不多搭载一些设备、多具备一些功能,实在是太浪费了。实际上,在各国的各种深空探测器上,都是能多塞一件设备就多塞一件设备的。
“隼鸟2号”的本体上带有四台科学仪器,分别是光学导航相机、激光高度计、红外波谱仪和热红外相机。光学导航相机实际上是由三台相机组成的。分别叫做ONC-T、ONC-W1、ONC-W2。ONC-T 的视场角是6.35°×6.35°,焦距为100米至无穷大,指向天底方向。ONC-W1、ONC-W2的视场角都是65.24°×65.24°,焦距都是1米至无穷远。但ONC-W1指向天底方向,ONC-W2指向探测器的侧面。光学导航相机的主要任务是拍摄宇宙中的星图,与探测器电脑中存储的星图进行对比,从而确定自己的飞行方向。当接近“龙宫”小行星之后,它们还要从众多天体中找到“龙宫”,指引探测器向着它飞行。
激光高度仪的工作波长为1.064微米,工作距离为30米至25000米。它在“隼鸟2号”上有两个用途。首先是作为最后阶段的精确导航设备,另外还可以绘制“龙宫”表面的地形图。后一种功能与地球观测卫星上的激光高度计很类似。
红外波谱仪被称为NIRS3,这就有些意思了。因为这种仪器的缩写一般是NIRS,这个“3”字是从何而来的呢?根据JAXA的说法,3指的工作波段为1.8~3.2微米。这种选择是因为羟基化合物和水分子在3微米上的反射信号最为强烈,因此这台红外波谱仪实际上是去找水的。
热红外相机,用来探查小行星的地质结构。小行星上没有大气层,因此昼夜温差很大。沙质结构和中空岩石的温度差大一些,高密度岩石小一些。通过对比昼夜的红外图像。就能了解小行星的地质结构。这项技术在“隼鸟1号”上已经得到了验证,清晰地展示了糸川小行星的地质结构。
除了这么多的设备,“隼鸟2号”还携带了四个小型的着陆器。其中有三个圆的和一个方的。长方体着陆器是德国航天局和法国航天局联合研制的。三个圆柱形着陆器中,有两个是JAXA自己研制的,还有一个是多家日本大学联合研制的。需要注意的是,这些着陆器没有轮子也没有腿,它们是靠特制机构来蹦跳的。关于它们,我们在后文还要详细解读。
用超大型天线保持联系
深空探测器最怕的是什么事情呢?是动力不足吗?是电力不够吗?是飞行时间太长吗?都不是。它们最怕的事情就是失联。
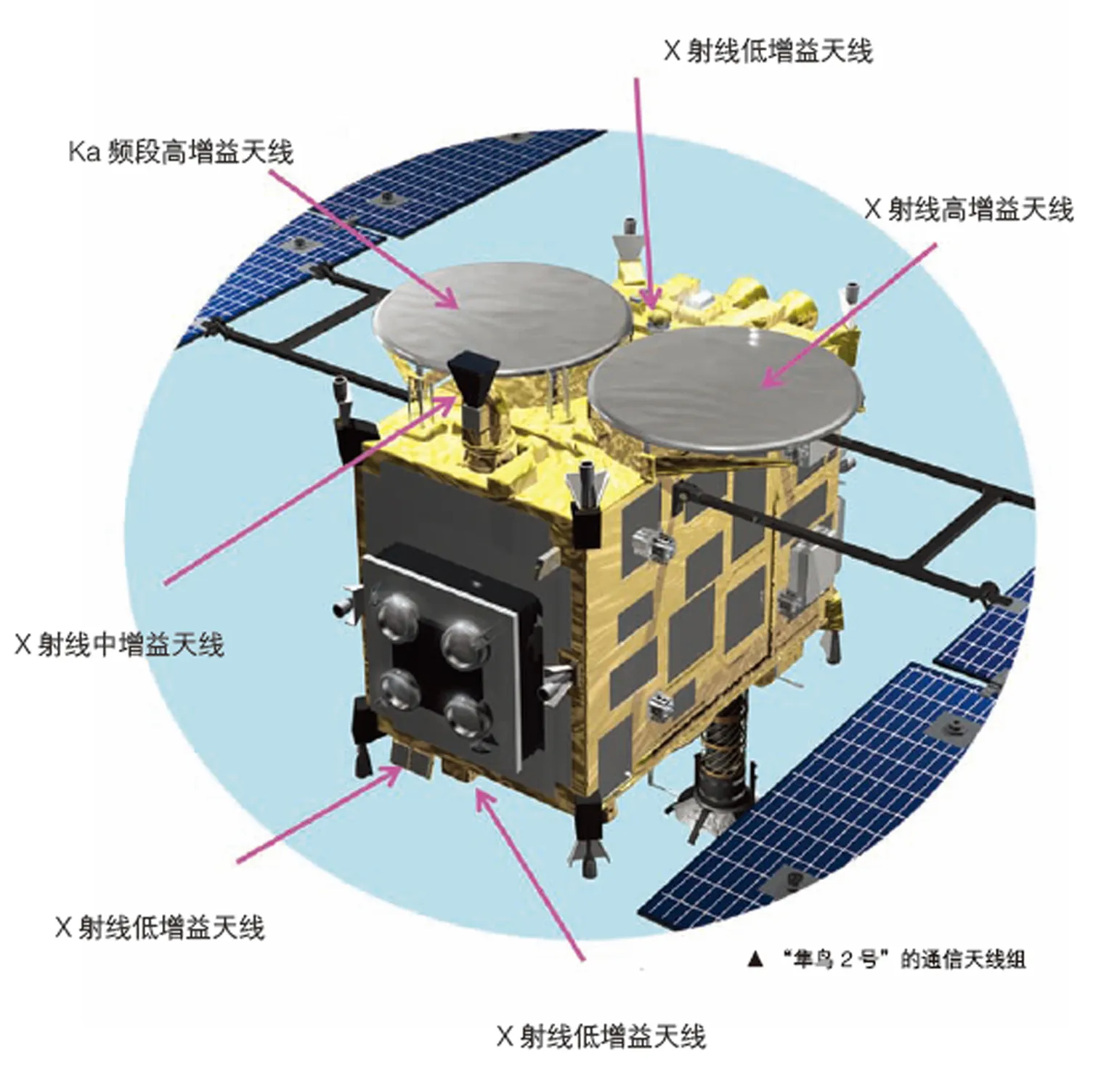
在茫茫宇宙当中,一个只有600多千克的探测器如果丢了,那是无论如何也别想再找回来了。因此,深空探测器上最重要的设备就是与地球联系的天线。隼鸟2号探测器也是一样,在它身上装着三套通信设备,分别工作在X频段和Ka频段。其中X频段上设置了4套天线,分别是2副低增益天线、1副中增益天线和1副高增益天线。而Ka频段天线是高增益天线,据说这也是Ka频段第一次用于深空探测。
“隼鸟2号”上携带了两套推力装置,一套是传统的化学推力器,另一套就是在“隼鸟1号”飞行期间立下汗马功劳的离子推进器。当然,即使携带了这么复杂的推力系统,要想凭借它们把609千克的“隼鸟2号”送到龙宫小行星附近也是很费力的。因此,JAXA设计了极其复杂的轨道,绕地球飞行的轨道上进行多次变轨。这样复杂的变轨,凭借日本本土设置的测控站是无法完成的,因此JAXA协调了美国和欧洲的合作伙伴进行测控。
“隼鸟2号”总共动用了5套测控天线。主要测控工作在X频段实施,日本本土臼田站的64米超大天线作为主站,日本内之浦站的34米天线、美国深空探测网的34米天线和70米天线、欧洲空间局的测控天线作为辅助站。这四套天线都具有收发功能,其中美国、欧洲的两套系统具备8GHz和32GHz两个频段的接收能力。另外还有日本内之浦站的20米天线作为单收站。而Ka频段测控能力只有美国深空探测网才具备,必须借用它。
在具体的测控站上,除了臼田站和内之浦站,还动用了澳大利亚的堪培拉站和新诺西亚站,欧洲的威尔海姆站、色布雷斯站、马德里站,美国的哥德尔斯顿站,阿根廷的Malargüe站。
日常的测控工作由臼田站执行。在重大操作时——比如炮轰“龙宫”和实际采样的时候,要靠美国宇航局的深空网来实施,。
总体来说,与“隼鸟1号”相比,“隼鸟2号”在体积和重量上略微大了一点,功能却强了很多。下表给出了主要参数的对比。
用太阳来吹一吹
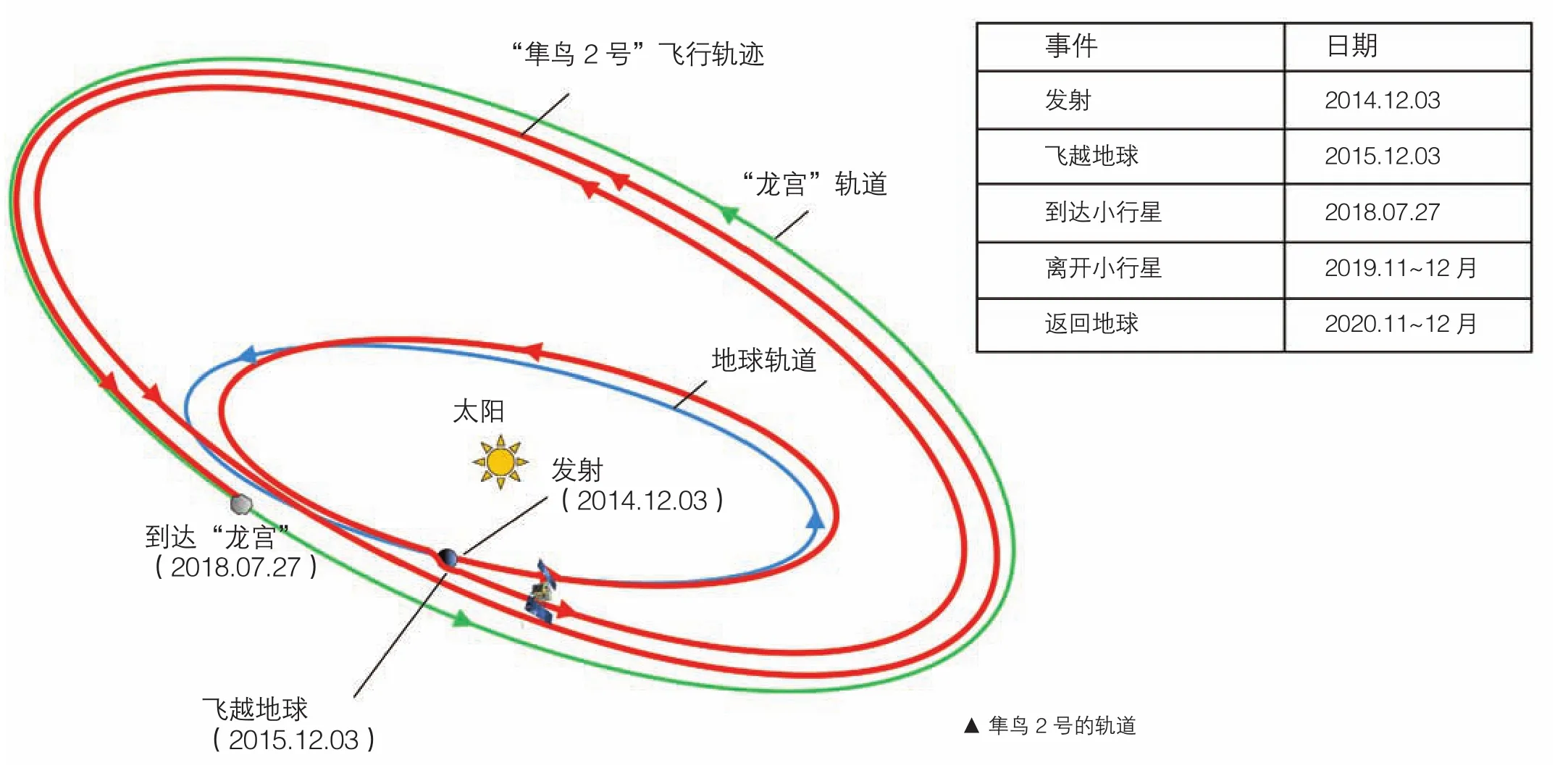
“隼鸟2号”起飞后,进入了一条绕太阳公转的轨道,公转周期和地球大致相同。一年后的2015年12月3日,“隼鸟2号”再次与地球相遇,然后加速向前进,进入一条半长轴更大的公转轨道,和“龙宫”的公转轨道近似。在这个过程中,“隼鸟2号”一度回到地球公转轨道附近。但那个时候地球并不在那里。“隼鸟2号”继续公转。利用和“龙宫”之间的周期差,终于在2018年7月2日追上了“龙宫”。
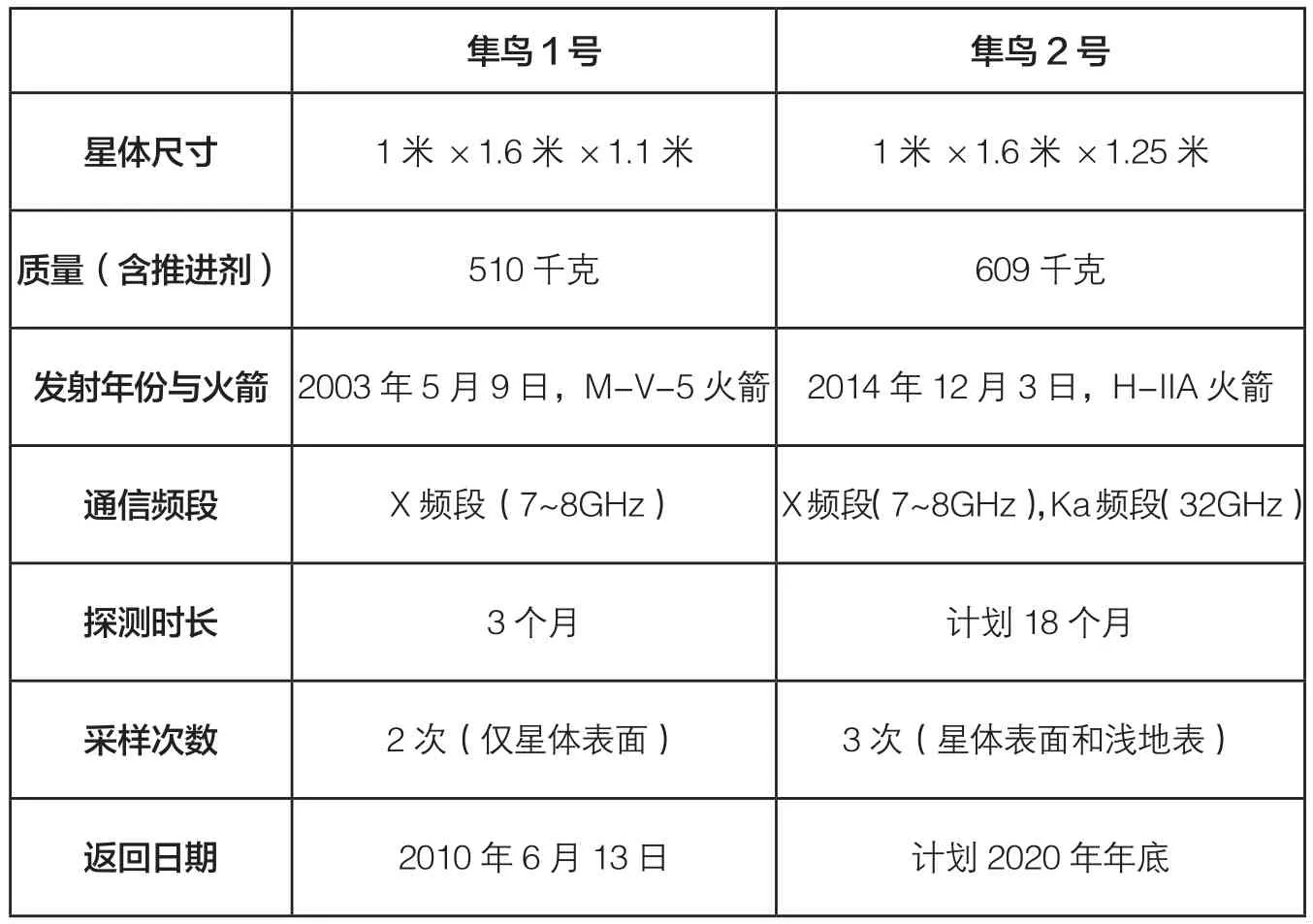
隼鸟1号 隼鸟2号星体尺寸 1米×1.6米×1.1米 1米×1.6米×1.25米质量(含推进剂) 510千克 609千克发射年份与火箭 2003年5月9日,M-V-5火箭 2014年12月3日,H-IIA火箭通信频段 X频段(7~8GHz) X频段(7~8GHz),Ka频段(32GHz)探测时长 3个月 计划18个月采样次数 2次(仅星体表面) 3次(星体表面和浅地表)返回日期 2010年6月13日 计划2020年年底
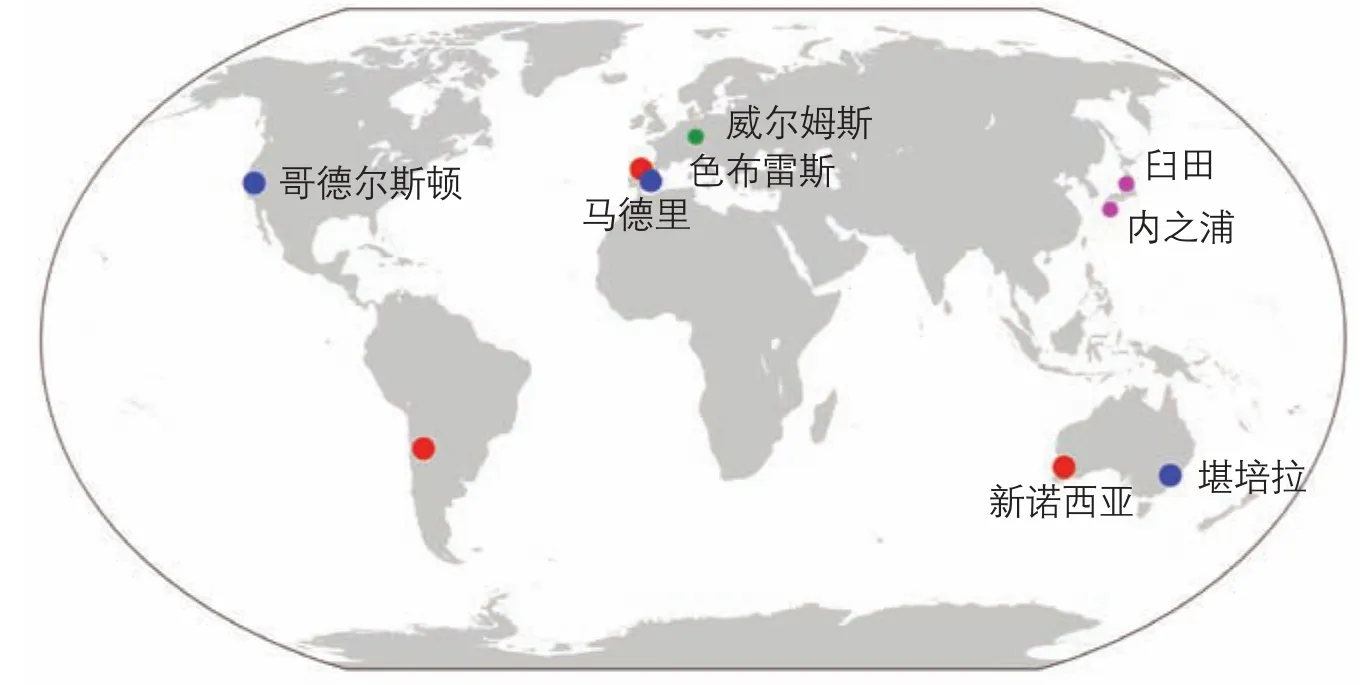
▲ “隼鸟2号”全球测控网组成
按照传统方式,这个过程要消耗很多燃料。因此,“隼鸟2号”探测器还采用了一种脑洞很大的推进模式,称为太阳帆模式。
早在2010年,JAXA就研制并且试验了一种太阳帆飞行器。经过这次实践,日本取得了关于太阳风压推进的第一手经验。在“隼鸟2号”飞行的某个阶段,它的推进不是仅仅靠离子推进器来实现的,而是利用两片太阳电池来当做真正意义上的风帆。
2015年3月27日,“隼鸟2号”成功进入了绕太阳公转的轨道,太阳风吹拂在两片太阳电池上。这时候,通过独立调整这两片太阳电池的角度,就能为“隼鸟2号”提供一定的控制力矩,地面控制人员关掉了4台反作用飞轮中的3台,只留下一台继续工作。这样也可以节省飞轮的消耗,以备不时之需。这个工作状态持续到了2015年5月7日。
到2015年9月6日,太阳正好处在“隼鸟2号”飞行方向的后面,于是太阳帆推进模式全开。这个阶段一直持续到2016年8月3日,再次回到太阳帆姿态控制模式。
在“隼鸟2号”前往“龙宫”的两年半旅程之中,太阳帆姿态控制模式可以运行9个月之多。这大大减少了飞轮的寿命消耗,也节省了推力器的燃料。
其实,太阳光压对航天器姿态的影响一直为人们所熟知。在环绕地球运行的航天器上,太阳光压是个扰动因素,对宇宙飞行来说就是另外一回事了。未来,能不能让太阳风发挥更大的作用呢?能不能让它成为星际飞行的主要动力呢?如果能够制造出更轻、更薄的太阳电池来,或许就可以实现了。
猜你喜欢
今日农业(2022年2期)2022-11-16
振动与冲击(2022年19期)2022-10-17
军事文摘(2022年8期)2022-05-25
军事文摘·科学少年(2022年4期)2022-05-14
航天标准化(2021年3期)2021-12-25
中国船检(2020年11期)2020-11-27
数学大王·中高年级(2020年3期)2020-03-13
小哥白尼·趣味科学画报(2019年12期)2019-02-28
科普童话·百科探秘(2014年1期)2014-01-13
小雪花·初中高分作文(2009年7期)2009-11-16
