基于SISOtool的力伺服控制系统的设计
2019-04-08 02:59:50邹宇鹏石永军孙少华吴宝贵
实验室研究与探索 2019年1期
邹宇鹏, 石永军, 孙少华, 吴宝贵, 王 诺
(中国石油大学(华东) 机电工程学院,山东 青岛 266580)
0 引 言
在工程实践过程中,频域分析法以及根轨迹法是经典控制系统(单输入-单输出系统)的两种基本设计方法[1-2]。在经典控制系统的设计过程中,需要根据系统性能指标的要求以及工程经验,选择合适的控制器,然后试凑并反复地调整控制器参数,直至系统性能指标满足设计要求。但是,由于整个设计过程涉及到大量复杂的计算以及性能曲线的绘制,费时费力且效果不理想[3]。即使利用高级语言编程来完成控制系统的计算机辅助设计,也需要花费大量的时间来编写及调试程序实现在线调参与动态性能分析的实时交互。
目前,控制系统的计算机辅助设计(Computer Aided Control System Design, CACSD)技术已经非常成熟,各类CACSD软件种类繁多[4]。其中,Matlab是目前控制系统分析、设计及和仿真领域最受欢迎的软件系统,它将工程师的主要精力从底层重复性机械劳动转移到了控制理论和方法,提高了控制系统设计的效率和可靠性[5-6]。Matlab的Control System Toolbox工具箱为系统化地分析、设计调节线性控制系统提供了算法和应用程序,便于分析和可视化时域和频域中的系统行为。其中,SISOtool (Single Input Single Output Toolbox) 子工具箱为单输入-单输出控制系统的设计提供实时交互的操作环境[7-8]。该工具箱能够实时显示校正后系统的根轨迹图和伯德图;在控制系统设计过程中,根据相位裕度、幅值裕度、截止频率等约束条件,利用鼠标调节控制器零极点分布,直至设计出满足要求的控制器。
本文以柔索驱动力伺服控制系统为研究对象。建立系统的数学模型;分析了柔索驱动前向通道传递函数频率特性,明确其基本控制问题;确定柔索驱动复合控制策略;再利用SISOtool工具箱对系统前向通道控制器进行详细设计,最后通过实验验证控制策略的有效性。
1 柔索驱动系统模型
根据图1所示柔索驱动单元的系统组成和特点,柔索驱动单元机理模型如图2所示。柔索驱动单元采用直流力矩电动机作为驱动元件,提供负载力;通过柔索将负载力传递给主动运动单元[9-10]。

图1 柔索驱动单元

图2 柔索驱动单元机理模型
根据图2的机理模型,在考虑承载对象运动影响的情况下,柔索驱动力伺服系统的开环模型方框图如图3所示。有两个输入量影响加载系统输出的柔索牵引力F,一个是加载电动机电枢电压u,另外一个是承载对象的运动而引入的速度扰动v0[11]。

图3 柔索驱动力伺服系统的开环模型方框图
由图3可得到,在考虑承载对象运动影响的情况下,柔索驱动被动式力伺服系统的传递函数为
F(s)=M1(s)U(s)-M2(s)V0(s)
(1)
式中:M1(s)为从输入电压u到输出F的对象模型,是指令前向进入的通道,称之为前向通道传递函数;M2(s)为从输入速度v0到输出力F的对象模型,是多余力产生的通道或者扰动的通道,称之为多余力传递函数[12-13];而
M1(s)=Cmr(Ms2+Bs+K)/[JeLs3+(BeL+JeR)s2+
(BeR+CmCe+KLr2)s+KRr2]
(2)
M2(s)=(Bs+K)[JmLs2+(BmL+JmR)s+
(BmR+CmCe)]/[JeLs3+(BeL+JeR)s2+
(BeR+CmCe+KLr2)s+KRr2]
(3)
2 系统特性分析
柔索驱动力伺服控制系统的设计要满足两个要求:①系统应是高阶无静差的,并要求有很好的快速性;②主动运动单元的运动是施加在力伺服回路的外部扰动,会严重影响系统的加载精度,最大程度地抑制多余力的影响也是控制系统设计的基本要求。
为了保证柔索驱动单元的加载精度和快速性,以系统前向通道传递函数M1(s)为研究对象,分析其动态特性,明确前向通道控制系统设计的方向。在此基础上,设计前向通道控制器,提高柔索驱动单元对指令信号的跟踪能力。
系统前向通道传递函数M1(s)可以分解为1个1阶惯性环节和1个2阶振荡环节,M1(s)中不含有积分项,是典型的0型系统。图4所示为系统前向通道频率响应曲线,在低频段,M1(s)幅频响应曲线足够平直,无需校正;相频响应呈现滞后特性,并有1°左右的整体滞后,在10 Hz(62.8 rad/s)处系统相位滞后约35°;同时由于二阶微分环节的影响,高频段系统幅值衰减强度变弱。
对于M1(s)这个0型系统,其主要控制问题是:为了提高系统稳态精度,需提高系统类型,要引入积分校正,但引入积分校正会降低系统相位储备,危及系统稳定性;为了保证系统的稳定性就要降低系统的开环增益,但这样会降低系统的响应速度;柔索驱动单元前向通道控制器的设计需要兼顾精度和快速性。
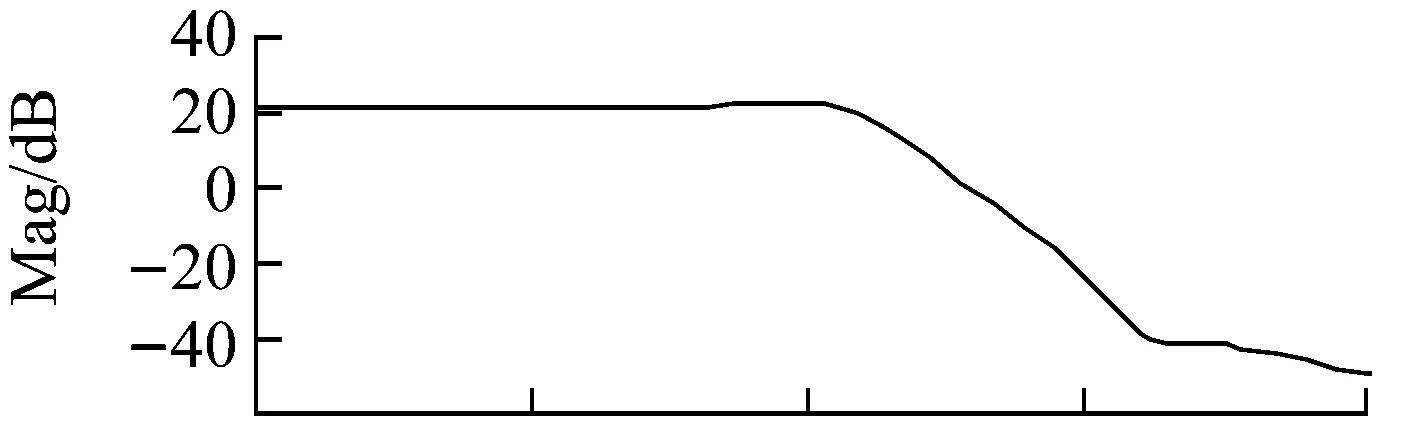

图4 柔索驱动前向通道传递函数伯德图
3 柔索驱动单元复合控制策略
考虑到一般的反馈控制在扰动的抑制、高阶无静差以及协调系统动静态指标等方面的能力有限,本文采用前馈控制和反馈控制相结合的复合控制,前向通道复合控制的结构方框图如图5所示[14]。

图5 柔索驱动单元复合控制系统
采用积分校正Ki/s,系统从0型提高到Ⅰ型,提高了系统的稳态精度。局部反馈Gp_lead(s)采用二阶的相位超前环节,改善系统的动态品质。二阶相位超前校正环节为:
(4)
式中:ωan的选取原则是补偿系统在中频段的相位滞后,保证系统在工作频段的滞后小于10°;阻尼比ξan越大,Gp_lead(s)所提供的相位补偿越小;ωad根据需要滤除高频噪声的频率确定,阻尼比ξad越大,高频衰减越快,但Gp_lead(s)相位补偿能力会降低;Ka根据稳定条件确定,调节局部反馈系统的增益。ωad和ωan可以通过需要补偿的相位裕量确定,ωan<ωad。
前馈校正环节Gff(s)配合Gp_lead(s)共同提高系统的快速性,其本质是一种开环控制形式。为了保证系统的稳定性,将前馈校正环节Gff(s)设定为比例环节。当输入的变化较快时,积分环节对高频信号抑制显著,积分控制器的输出很小,此时输入信号经由前馈校正环节Gff(s)直接进入到局部反馈校正后的系统,系统近似工作于开环状态,系统的快速性得到最大程度的发挥;当系统进入稳态后,积分环节的作用增强,系统在积分负反馈控制和前馈控制的共同作用下工作,系统处于闭环工作状态,稳态性得到提高。
此外,ξ为工频噪声,通过双T带阻滤波器Gbs(s)滤波,其阻带频率范围为45~55 Hz[15]。
4 基于SISOtool的控制器设计
为了衡量控制系统的优劣,柔索驱动力伺服系统要满足:①“双十”指标:10 Hz范围内,给定与实际输出之间的幅值变化不超过10%,相角变化小于10°,即校正后系统在低频段的频率特性平坦[16];②阶跃响应调整时间小于0.05 s;③阶跃响应超调量小于10%。
基于Matlab-SISOtool工具箱详细设计柔索驱动单元前向通道控制器的基本步骤如下。
步骤1在Matlab工作空间中构建柔索驱动系统前向通道传递函数,在命令行窗口输入的指令为:
num=[Cm*r*MCm*r*BCm*r*K];
den=[ (M*r^2+Jm)*L(Bm+B*r^2)*L+(M*r^2+Jm)*R(Bm+B*r^2)*R+Cm*Ce+K*L*r^2K*R*r^2 ];
G=tf( num, den);
式中,各参数的数值大小见表1。

表1 柔索驱动单元力伺服系统标称参数表
步骤2在命令行窗口输入“SISOtool”指令,打开“Control System Designer”交互界面,如图6所示。
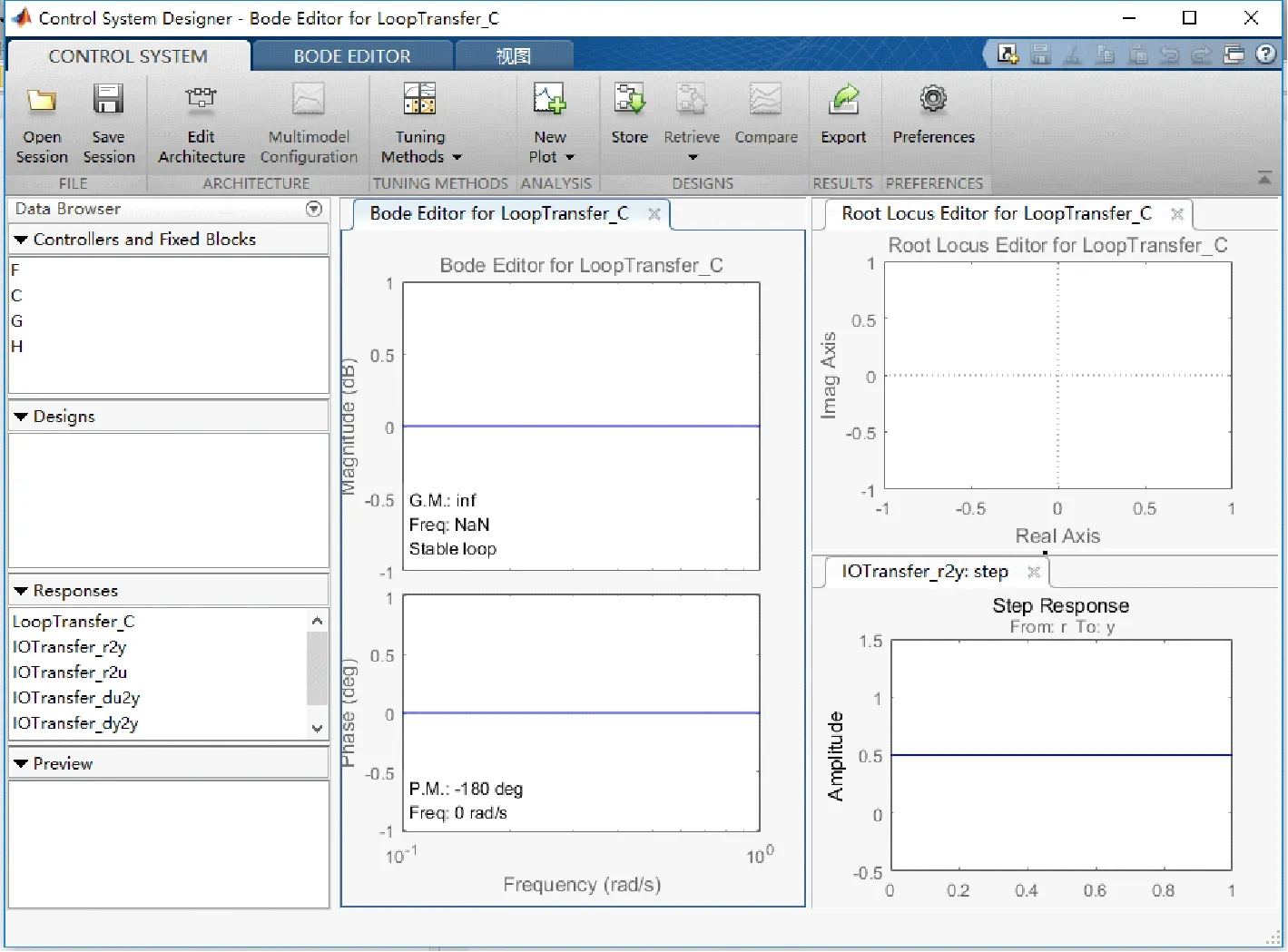
图6 Control System Designer 交互界面
步骤3根据图5所示的复合控制的结构方框图,首先设计二阶相位超前环节Gp_lead(s)。点击“Edit Architecture”工具栏,图7展示了常见的控制构型。确定控制构型为“Configuration 1”。
图中:F为前向通道滤波器;C为控制器;G为被控对象;H为反馈通道滤波器。点击,将工作空间中系统前向通道传递函数导入到被控对象G中,其他部分传递函数默认为1。此时系统的开环频率特性曲线、根轨迹曲线、闭环的阶跃响应曲线如图8所示。
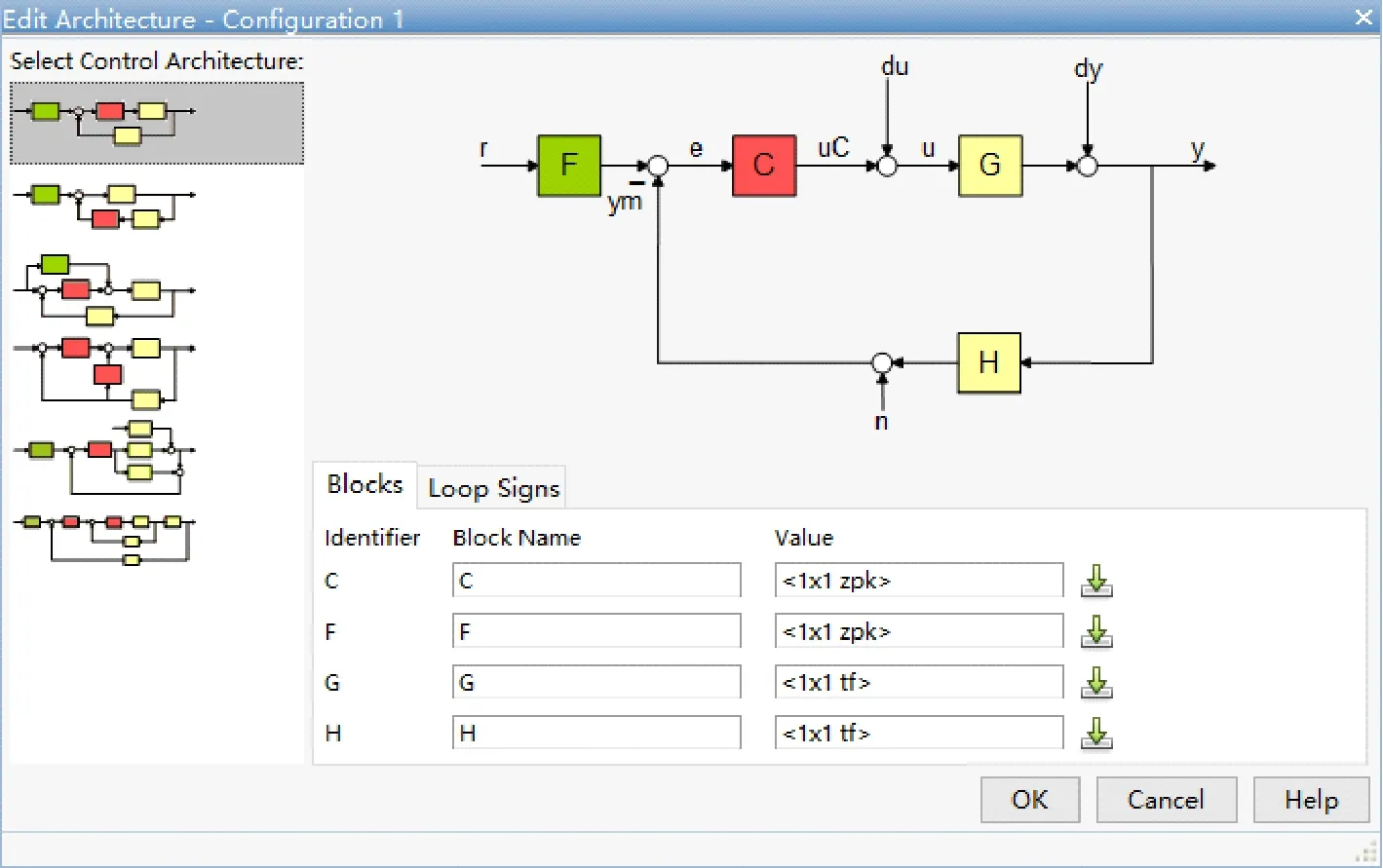
图7 控制构型 I
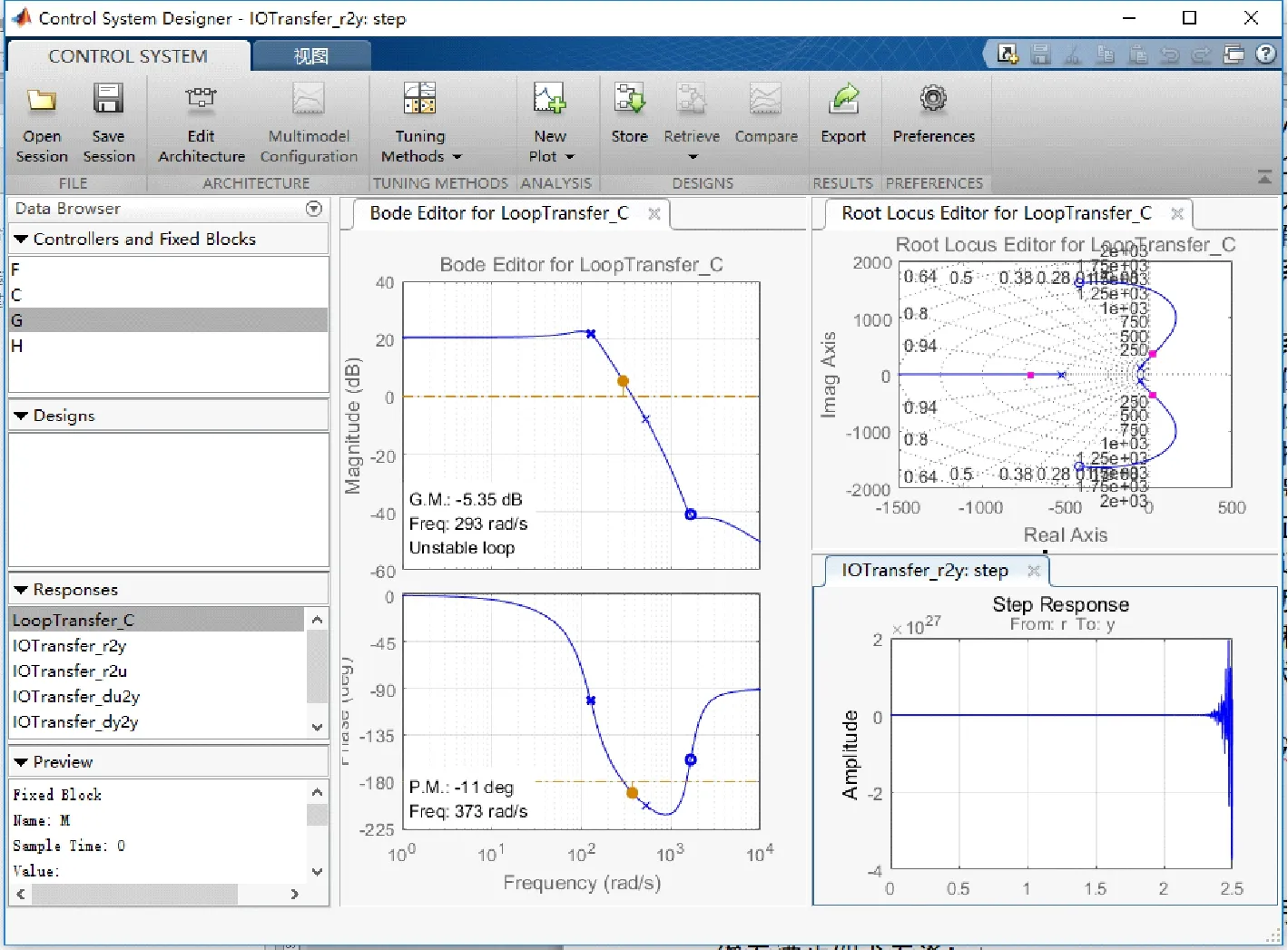
图8 被控对象的响应曲线
步骤4右键单击左侧“Controllers and Blocks”栏内的控制器C,选择“Open Selection”选项,出现“Compensator Editor”界面,如图9所示。

图9 控制器设计界面
右键单击界面中“Dynamics”空白区域,选择“Add Pole/Zero”选项,再分别选择“Complex Pole”和“Complex Zero”两个选项,分别向系统中增加一对复零点和一对复极点。如图10所示,图中,“○”和“×”分别代表2阶相位超前环节引入的复零点和复极点。
根据第3节确定的ωan和ωad的选取原则,经过试凑和验算,最终确定ωan=130 rad/s、ξan=0.8、ωad=1 000 rad/s、ξad=0.9;为了保证经过局部反馈校正后的系统的谐振峰值不超过0 dB,确定Ka=0.05。
图11中的实线是引入局部反馈校正环节后的闭环频率响应曲线,虚线是未校正的开环频率响应曲线。从图中可以看出,经过局部反馈校正后的等效系统相位储备得到了较大提高;由于局部反馈校正环节增益Ka较小,系统存在较大的稳态误差(约为-8 dB),但是幅频响应曲线仍然较为平坦,这样有利于对其实施进一步的校正。

图10 控制系统设计过程中交互界面


图11 局部反馈校正后系统闭环频率特性
步骤5再根据图5所示的复合控制的结构方框图,进一步设计积分控制器和前馈校正环节Gff(s)。确定控制构型为“Configuration 6”,如图12所示。G2为系统前向通道传递函数;C2为2阶相位超前环节Gp_lead(s);C1为即将要设计的积分控制器;通过F引入前馈校正环节;此外,其余各环节默认为1。

图12 控制构型VI
步骤6同样操作方法设计积分器C1,在“Dynamics”空白区域,选择“Add Pole/Zero”选项,再选择“Integrator”选项。经过试凑和验算,积分系数为150,采用积分负反馈以及局部反馈校正后系统的开环频率特性曲线如图13所示,此时系统的幅值裕量为15.4 dB,相位裕量为89.2°,系统具有很好的稳定性。但是积分校正会使系统相位储备下降,此时系统在10 Hz处幅值衰减约4 dB,相位滞后约为60°,如图14所示。


图13 积分-局部反馈校正系统开环频率特性
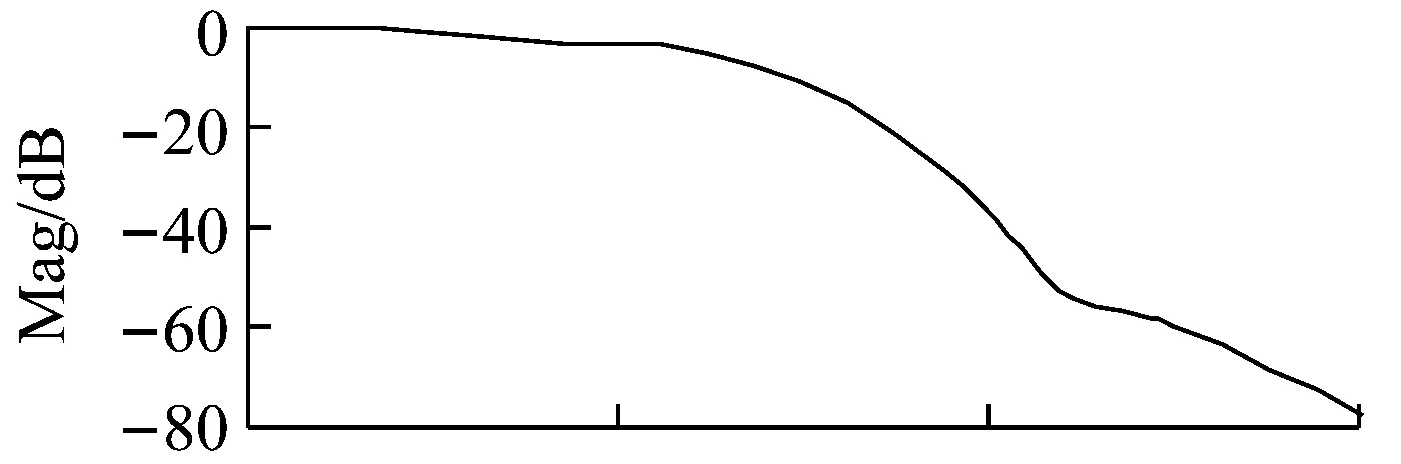

图14 积分-局部反馈校正系统闭环频率特性
步骤7同样操作方法设计积分器F,在保证稳定的前提下,前馈环节的比例系数为1.9。经复合校正后的系统的闭环频率响应曲线如图15所示。从图中可以看出,经复合校正后的系统稳态误差较小,系统在10 Hz处相位滞后约为8°,-10°相移约为20 Hz。

图15 复合校正后系统闭环频率特性曲线
经过复合校正后的系统的阶跃响应曲线如图16所示,阶跃响应调整时间小于0.05 s,校正后的超调量不超过10%。
5 实验研究
为了验证复合控制策略的有效性,进一步利用所设计的复合控制器进行柔索驱动单元主动加载控制实验研究,结合第4节的理论分析结果,同时根据实验过程中系统的实际响应情况对复合控制器各部分参数进行调节,最终确定复合控制器各部分的参数为:局部反馈校正环节Ka=0.05、ωan=130 rad/s、ξan=0.8、ωad=1 000 rad/s、ξad=0.9;积分负反馈环节Ki=150;前馈校正环节K=2.8。进行主动加载实验,期望负载力为正弦信号,频率分别为1 Hz和10 Hz、幅值为20 N,初始情况下柔索的预紧力为150 N。复合控制主动加载实验效果如图17和图18所示。
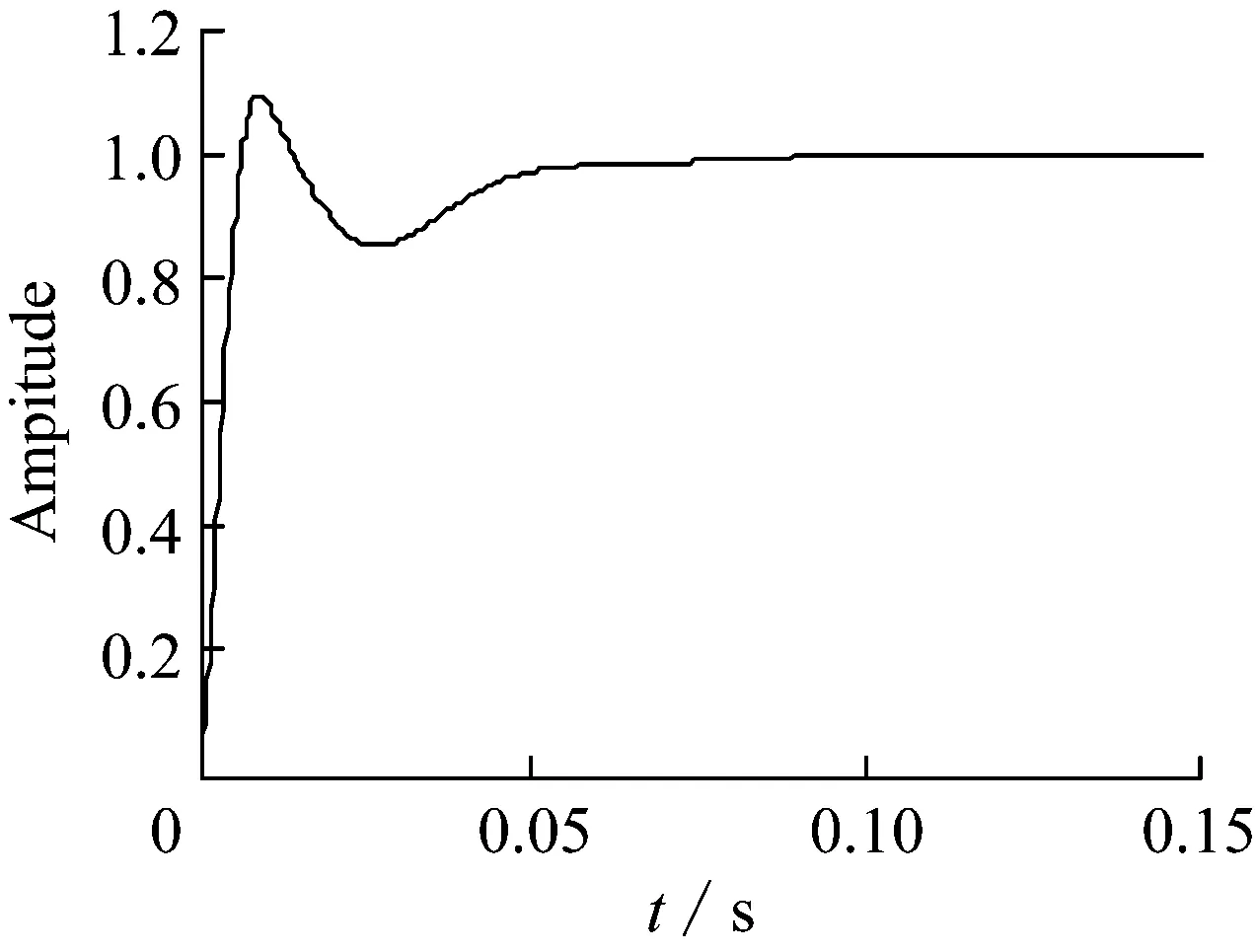
图16 复合校正后系统阶跃响应

图17 1 Hz复合控制跟踪曲线

图18 10 Hz复合控制跟踪曲线
在图17和图18中,虚线为期望负载力,实线为柔索驱动单元实际产生的负载力。当给定频率为1Hz时,柔索驱动单元实际负载力曲线能够很好地跟随期望负载力曲线;当给定信号频率为10 Hz时,系统相位滞后约为9°,实际力幅值为期望力的0.95倍(-0.45 dB),加载误差不超过10%。所设计的柔索驱动复合控制器满足控制器设计要求。
6 结 语
本文以柔索驱动力伺服控制系统为研究对象,建立了系统的数学模型,分析了柔索驱动前向通道传递函数的频率特性,明确了基本控制问题,确定了柔索驱动单元复合控制策略,进一步利用SISOtool对系统前向通道控制器进行详细设计,最后对柔索驱动复合力控制策略进行了实验研究。设计过程及实验结果表明,SISOtool可简化单输入-单输出控制系统设计过程,设计过程直观高效。SISOtool工具箱对于控制理论的学习及控制系统的设计都具有重要的参考意义,便于实验教学和科学研究。
猜你喜欢
汽车实用技术(2022年7期)2022-04-20 11:45:04
房地产导刊(2020年11期)2020-12-28 01:32:30
国学(2020年1期)2020-06-29 15:15:30
铁道通信信号(2019年4期)2019-10-10 03:42:56
测控技术(2018年7期)2018-12-09 08:58:46
数学物理学报(2017年6期)2018-01-22 02:26:53
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
光学精密工程(2016年4期)2016-11-07 09:05:39
通信电源技术(2016年1期)2016-04-16 04:57:31
电测与仪表(2014年11期)2014-04-04 09:21:20