
基于Cortex-M3的槽式太阳能热发电自动追踪系统
2019-04-02 09:13:40上海电力大学自动化工程学院韩万里茅大钧魏骜吕彬
太阳能 2019年3期
上海电力大学自动化工程学院 ■ 韩万里*茅大钧 魏骜 吕彬
0 引言
2016年12月22日,国家能源局发布《太阳能发展“十三五”规划》,提出要积极推进太阳能热发电产业化发展,到2020年年底,太阳能热发电总装机容量达到500万kW,太阳能热发电成本要低于0.8元/kWh。目前,太阳能热发电方式主要有槽式、碟式、塔式和菲涅尔式4种。其中,塔式太阳能热发电系统受地形限制,中心塔建造成本高,跟踪系统复杂,目前仅限应用于偏远地区的小型独立供电方式;碟式太阳能热发电系统与电网并网时的传送电压较低,规模小、成本高,目前尚无商业化规模运行的案例,仅处于示范阶段;菲涅尔式太阳能热发电系统的工作效率较低,热损失大,作为刚开发成功的系统,目前只有小型项目在运行,仅处于商业化运行前期;而槽式太阳能热发电系统的土地利用率高,可联合运行,使用材料少,制造成本低,具有储热能力,已达到商业化发展的水平,是目前太阳能热发电系统中最为成熟的一种发电方式,但其跟踪系统的结构较为简单,存在跟踪精度差、跟踪方式单一及跟踪系统稳定性差等问题。因此,设计一种高精度、多追踪模式、全方位、高稳定性的槽式太阳能热发电自动追踪系统,已成为一种必然趋势。
1 槽式太阳能热发电系统简介
槽式太阳能热发电系统的全称为槽式抛物面反射镜太阳能热发电系统,其主要是采用大面积的槽式抛物面反射镜阵列,将太阳光聚焦反射到线性接收器(集热管)上,通过加热管内工质,产生高温蒸汽,进而驱动常规汽轮发电机组发电[1]。整个系统主要由4部分组成:槽式太阳能集热器场、蓄热与热交换系统、辅助能源系统及动力发电系统等。图1为槽式太阳能热发电系统图。
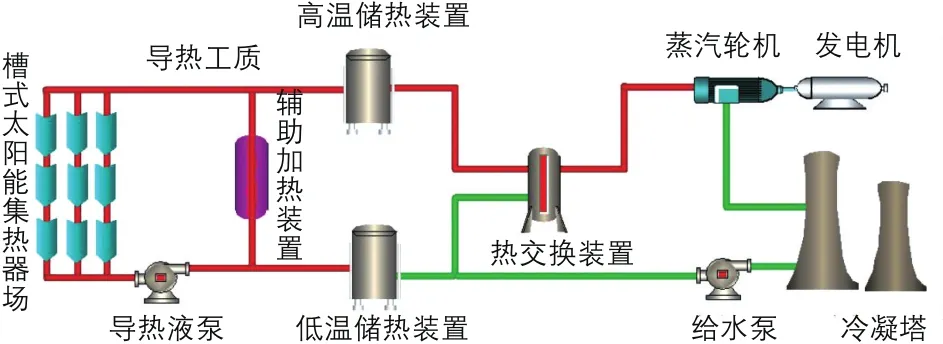
图1 槽式太阳能热发电系统图
1.1 槽式抛物面太阳能集热器
槽式抛物面太阳能集热器是槽式太阳能热发电系统的关键部件,主要包括聚光器、接收器和跟踪系统等部分。槽式抛物面太阳能集热器本质上是利用二维抛物线反射器线性平移得到光能,通过聚焦、反射和吸收等过程将光能转化为热能。图2为槽式抛物面聚光器的原理图[2]。

图2 槽式抛物面聚光器的原理图
槽式抛物面开口宽度b的大小决定了聚光器输入的总能量。对于圆形聚光器而言,聚光器的聚光比C可表示为:

式中,d为集热管直径。
太阳光经抛物面反射后,能全部落到集热管上的条件为:

式中,δs为太阳光线的半张角。
抛物线方程为:

式中, f为抛物线的焦距。
根据式(3)可求得集热管的最小直径dmin为:

1.2 槽式太阳能热发电系统的跟踪方式
槽式太阳能热发电系统的跟踪方式有单轴跟踪和双轴跟踪两种方式。单轴跟踪方式一般采用东西向或南北向跟踪,虽然采用该方式的系统机械结构简单、易于维护,但其只能在方位角上跟踪太阳,高度角上只能进行人工调节,且太阳入射角只能在特定时间内为零,所以其聚光性较低,跟踪精度不高。双轴跟踪方式不仅可在方位角上对太阳进行跟踪,也可在高度角上对太阳进行跟踪,弥补了单轴跟踪的劣势,提高了追踪精度,理论上可完全追踪太阳的运行轨迹,使太阳的入射角为零,能有效提高集热器的集热效率,并可提高太阳能利用率。图3为单、双轴跟踪方式原理图。
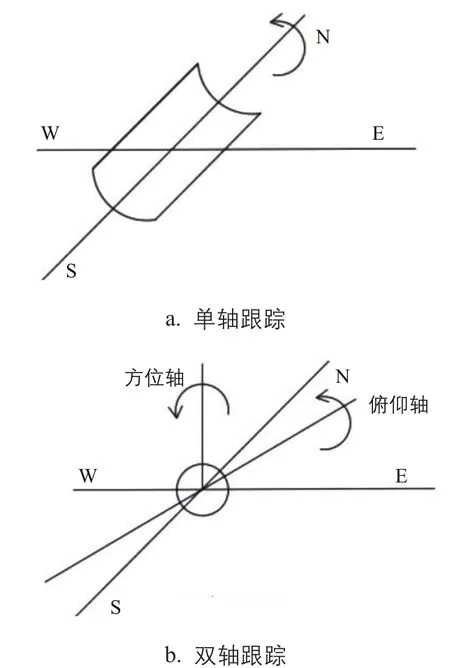
图3 单、双轴跟踪方式原理图
本文设计的基于Cortex-M3的槽式太阳能热发电自动追踪系统采用的是双轴跟踪方式。下文对该系统的硬件和软件设计进行了详细介绍。
2 系统硬件设计
本槽式太阳能热发电自动追踪系统的硬件部分主要由以Cortex-M3为核心的MCU追踪控制单元、GPS模块、实时时钟电路、角度传感器、风速传感器、光电检测模块、信号处理模块、电机驱动电路,以及步进电机等组成。系统结构框图如图4所示。
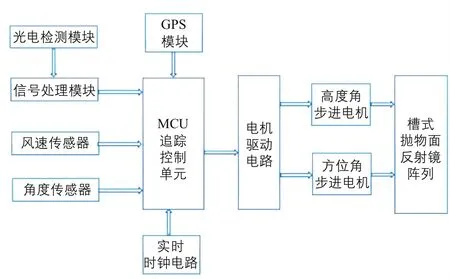
图4 槽式太阳能热发电自动追踪系统结构框图
2.1 MCU追踪控制单元
本自动追踪系统的MCU追踪控制单元选用的是32位的微处理器Cortex-M3 LPC1800,其具有成本低、性能高、功耗低、中断反应超快、效率高等特点。该微处理器具有高达180 MHz稳定的工作频率,最高1 MB双片内Flash和200 kB片内 SRAM,2个独立序列的 8通道 10位ADC,转换速率为400 ksps和最高多达164个I/O接口,能完全满足太阳能热发电自动追踪系统的要求。
2.2 光电检测模块
光电检测模块是通过光电二极管将光的变化量转化为相应的光电流,再经过电流放大和电压变换转换为系统所需的信号。本文在传统光电检测电路的基础上,设计了一种新型的光电检测电路,如图5所示。
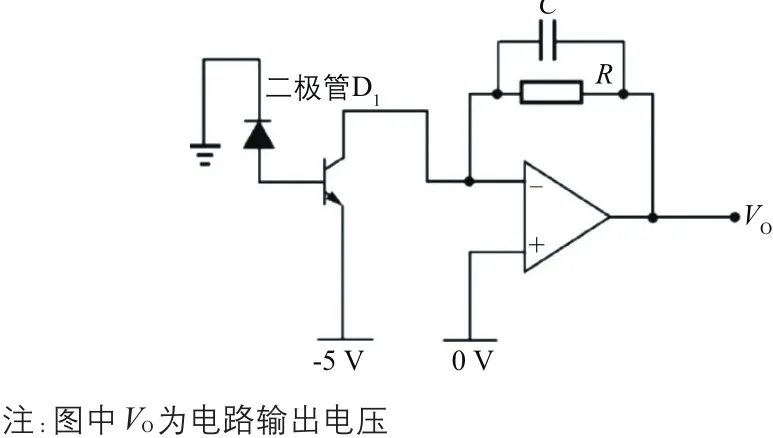
图5新型光电检测电路图
图5 中,在传统光电检测电路的基础上,新型光电检测电路在光电二极管输出和放大器输入之间增加了一个三极管,将电流进行前置放大。这样既保证了较高的信噪比,又提高了响应速度,同时也减小了传统光电检测电路的自激振荡现象,提高了系统的稳定性。
2.3 实时时钟电路设计
本自动追踪系统的实时时钟电路选择的是美国Dallas公司推出的一种低功耗的实时时钟芯片DS1302。它可以对年、月、周、日、时、分、秒等进行计时,具有闰年补偿功能[3];工作电压为2.0~5.5 V;内部有一个“31×8”的用于临时性存放数据的RAM寄存器,I/O接口为时钟控制接口,用于输入跟踪太阳的信号,如图6所示。
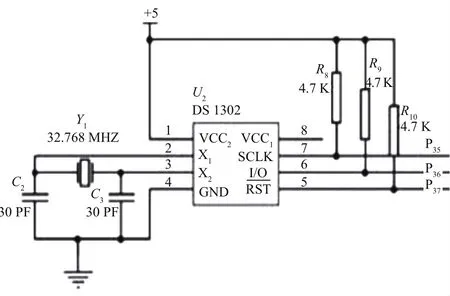
图6 实时时钟电路图
2.4 电机驱动电路
本自动追踪系统的电机驱动模块选用的是LV8727驱动芯片。该芯片是一个PWM电流控制微步距角步进电机马达芯片,采用双桥MOSFET驱动,内置温度保护及过流保护,最高耐压为50 VDC,具有自动半流锁定功能。该芯片不仅可以满足步进电机对恒转矩精确控制的要求,还可以降低控制系统的功耗,达到对步进电机精确控制的目的。图7为电机驱动电路图。
2.5 步进电机
步进电机是一种将电脉冲信号转换为线位移或角位移的开环控制元件。电机停止的位置取决于脉冲信号的脉冲个数,转速取决于脉冲信号的频率,均不受负载变化的影响。步进电机具有定位精度高、控制简单、无累计误差和惯量低等特点,广泛应用于各种自动化系统中,通常被用作定速控制和定位控制。
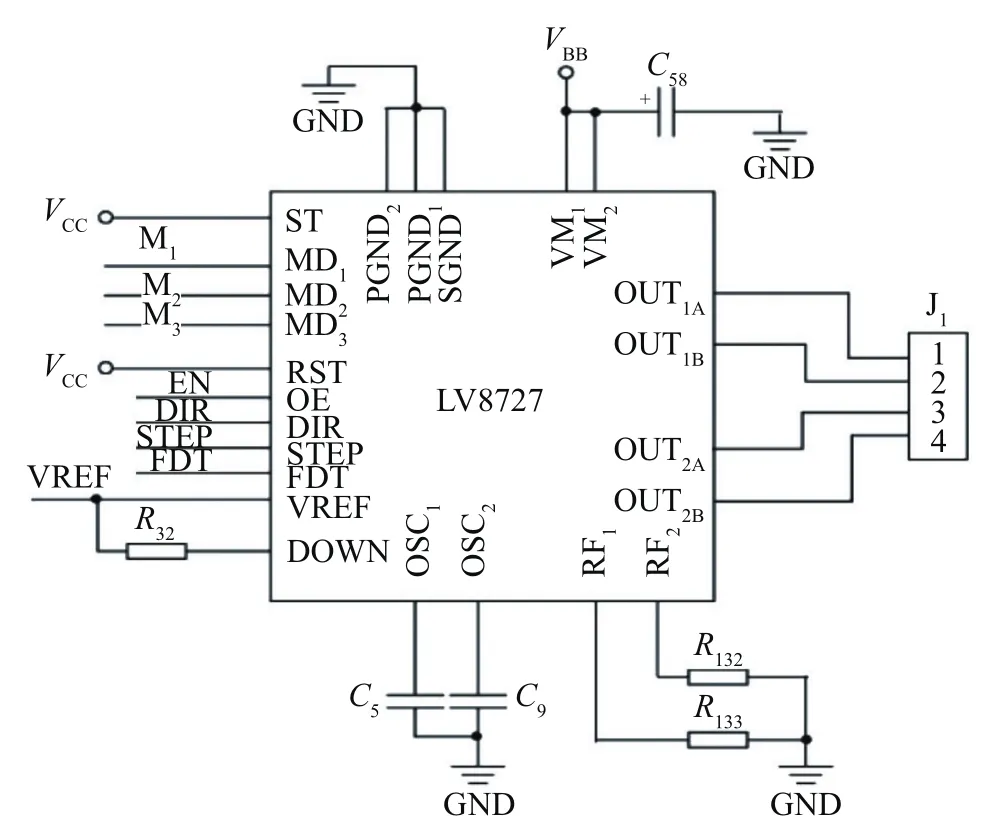
图7 电机驱动电路图
3 系统软件设计
本自动追踪系统是采用视日轨迹追踪和光电追踪相结合的双轴跟踪方式,先进行视日轨迹追踪粗调,再进行光电追踪精调,可提高太阳能的利用率。图8为本槽式太阳能热发电自动追踪系统的主程序流程图。
具体操作步骤为:
1)系统启动后,首先对各模块进行初始化操作,复位至起始位置;此时风速传感器开始进行工作,若测得当前风速大于临界值,自动追踪系统判定当前风速可能对系统造成破坏,于是启动自我保护程序,系统装置平放,以减少大风对跟踪装置的破坏;系统经过30 min延时后,风速传感器再次对当前风速进行测量。
2)若当前风速小于临界值,追踪系统从实时时钟读取当前时间。若当前时间是白天(08:00~18:00),追踪系统将启动视日轨迹追踪模式;此时MCU追踪控制单元通过GPS模块得到本地当前的时间和经纬度等信息[4],然后根据内置的相关计算方法,计算出当前时刻太阳的理论高度角和方位角;同时角度传感器实时测量太阳的实际高度角和方位角,便可得到理论值和实际值之间的误差;MCU追踪控制单元根据此误差,计算出方位角步进电机和高度角步进电机应该转动的脉冲数,通过电机驱动电路发出相应的电脉冲数,从而驱动步进电机的转动,完成视日轨迹追踪粗调。若当前时间是黑夜,追踪系统将处于关闭状态。
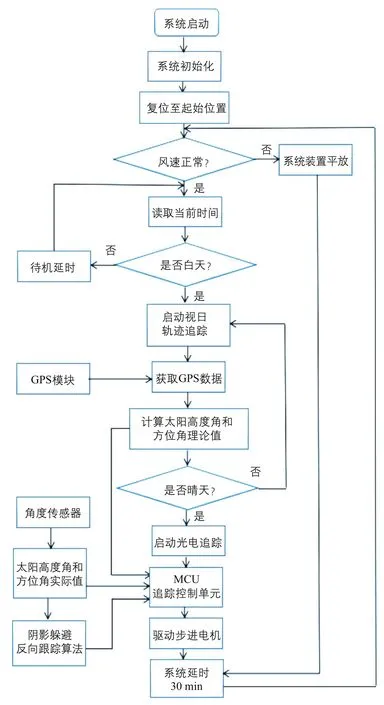
图8 槽式太阳热发电自动追踪系统的主程序流程图
3)下一步将进行晴、阴天的判断。本自动追踪系统通过光电检测模块,对当前时间的光照强度进行检测,若当前的光照强度小于设定值,则追踪系统判定当前天气为阴天,继续进行视日轨迹追踪粗调;若当前光照强度大于设定值,则追踪系统判定当前天气为晴天,将启动光电追踪精调,追踪系统通过光电二极管将光的变化量转换为相应的微弱光电流信号,经信号处理模块的处理和放大,得到较大的电压信号,再通过A/D转换电路转换为相应的数字信号,传输到MCU追踪控制单元中,经处理后,此时电机驱动电路发出相应的电脉冲信号,从而驱动高度角步进电机和方位角步进电机的转动,完成实时的光电追踪精调。
4)本自动追踪系统的阴影躲避反向跟踪算法,即根据GPS模块提供的太阳实际的高度角和方位角自动计算阴影,启动躲避时间,保证抛物面反射镜始终与太阳保持一个最佳角度,互不干扰。系统启动运行后,将循环检测当前的天气情况,间隔时间为30 min,以此来选择合适的追踪方式,保证本自动追踪系统的实时性、准确性和经济性。同时,为了应对长时间的雨雪等恶劣天气,该系统还增加了辅助燃气轮机组,以保证系统的稳定运行;而对于短时间的雨雪等天气,系统可通过本身的蓄热装置来供给。
3.1 视日轨迹追踪
视日轨迹追踪是一种基于天文学参数的开环式主动追踪方式,其所需的当前时刻的太阳高度角和方位角可由式(5)~式(7)求得。
太阳高度角α的计算式为:

式中,φ为当地地理纬度(GPS可直接测得);δ为太阳赤纬角;ω为太阳时角,以当地真太阳时正午为0°,上午时角为负,下午时角为正,每小时变化15°。
太阳方位角γ的计算式为:

太阳赤纬角δ的计算式为:

式中,dn为一年中某一天的顺序数。
3.2 光电追踪
光电追踪是在太阳的光照强度达到一定值时,系统所启动的一种追踪模式。在光电追踪过程中,追踪系统将偏差电压转化为相应的脉冲个数,然后通过电机驱动电路驱动步进电机转动,使抛物反射镜镜面垂直于太阳照射,保证最大限度地聚集太阳光。图9为光电追踪程序的流程图。

图9 光电追踪程序的流程图
光电追踪的流程为:首先光电检测模块通过光电二极管对当前的光照强度G进行检测,当G大于光照强度的设定值G1时,追踪系统将启动光电二极管初步追踪模式。若当前的抛物反射面未垂直对准太阳,遮光筒会出现较大的阴影面积,此时4个光电二极管所感应出的光电流大小不同,四象限探测器就会感应到光电流,追踪系统将进入到四象限探测器精确追踪模式,使追踪系统始终与太阳保持在最佳角度。四象限探测器将作为系统的反馈环节,使系统的追踪精度更高。
3.3 阴影躲避反向跟踪算法
在大规模的抛物反射镜阵列中,当太阳的高度角较低时,装置与装置之间势必会出现遮挡现象,这就会造成后排抛物反射镜对太阳光的聚光性降低,影响系统的光热转换效率,同时造成资源的浪费。本文所设计的自动追踪系统采用了一种阴影躲避反向跟踪算法,图10为该算法的程序流程图。
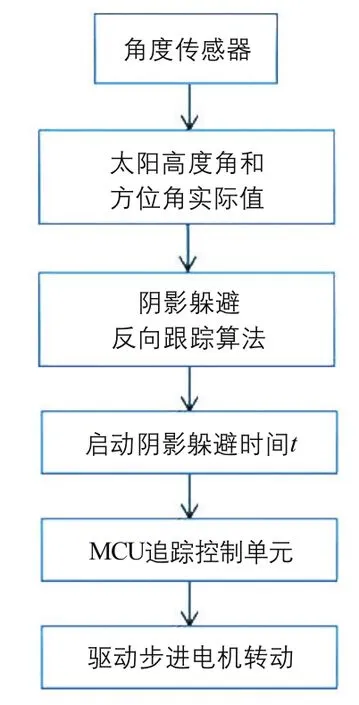
图10 阴影躲避反向跟踪算法的程序流程图
阴影躲避反向跟踪算法的流程为:首先,角度传感器开始工作,MCU追踪控制单元将得到太阳高度角和方位角的实际值;然后通过内置的阴影躲避反向跟踪算法计算出阴影躲避的启动时间;最后MCU追踪控制单元通过电机驱动电路驱动步进电机的转动,完成阴影躲避功能。
4 系统动态仿真与模拟
组态化的三维力控(Forcecontrol)软件最大的特点是以灵活多样的组态方式而不是编程方式来进行系统集成,其基本的程序及组件包括:实时数据库、工程管理器、I/O驱动程序、人机界面、控制策略生成器,以及各种数据服务和扩展组件等。本文通过Forcecontrol软件分别对固定式槽式太阳能热发电系统和本文设计的自动追踪系统进行了动态仿真模拟。图11为槽式太阳能热发电自动追踪系统主界面图,图12为固定式与自动追踪式输出功率对比图。
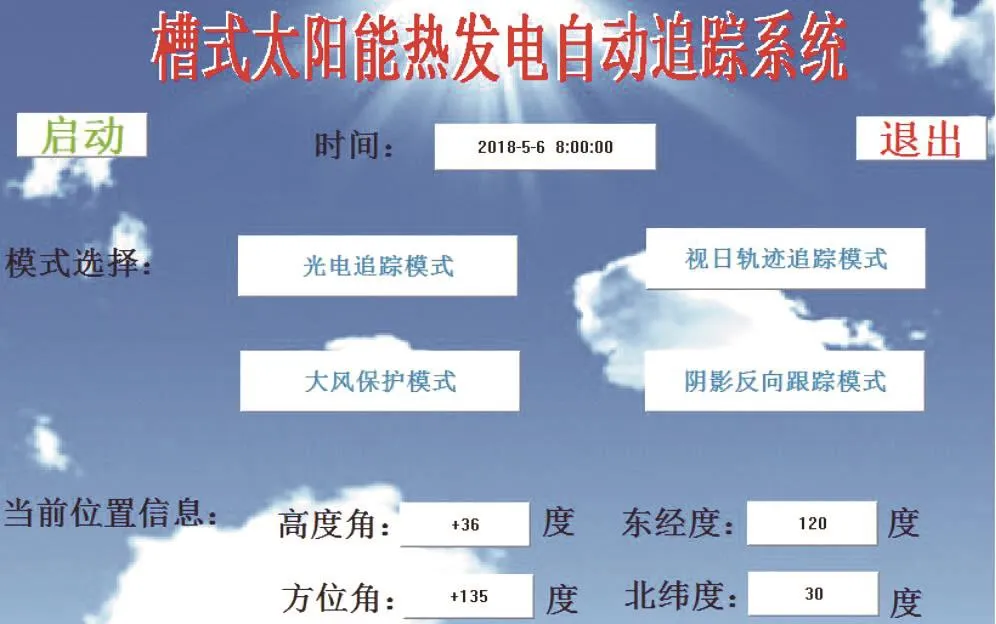
图11 槽式太阳能热发电自动追踪系统的主界面图
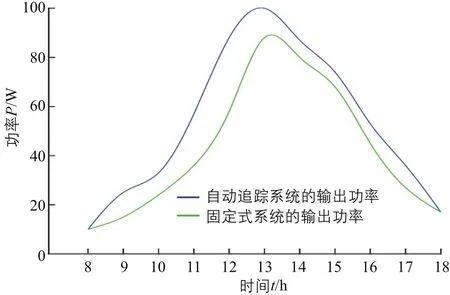
图12 固定式与自动追踪系统的输出功率对比图
由图12可知,自动追踪系统下的输出功率大于固定式系统下的输出功率,说明自动追踪系统的效果较好。
5 结论
本文设计了一种基于Cortex-M3的槽式太阳能热发电自动追踪系统,其MCU追踪控制单元以Cortex-M3为核心,采用光电追踪和视日轨迹追踪相结合的双轴跟踪方式,旨在提高追踪系统的精度;增加的阴影躲避反向跟踪算法,提高了追踪系统的效率;增加的辅助燃气轮机组,保证了追踪系统的稳定性。然后通过Forcecontrol软件对该自动追踪系统进行了动态仿真模拟,结果显示,自动追踪系统下的输出功率大于固定式下的输出功率,为该自动跟踪系统以后的商业化运行提供了一定的依据。
猜你喜欢
风流一代·经典文摘(2024年2期)2024-02-28 00:59:46
科学大众(2022年23期)2023-01-30 07:03:44
天文研究与技术(2021年3期)2021-07-15 01:57:44
小哥白尼(趣味科学)(2018年4期)2018-06-21 06:23:30
中国工程咨询(2017年4期)2017-01-31 03:05:20
环境科技(2016年4期)2016-11-08 12:19:04
光学精密工程(2016年6期)2016-11-07 09:08:09
哈尔滨理工大学学报(2016年2期)2016-09-12 14:37:06
发明与创新(2016年6期)2016-08-21 13:49:36
电源技术(2016年9期)2016-02-27 09:05:31
