基于复矢量解耦的电流环动态性能改进策略
2019-03-26 08:31:32包芳泉郭昊昊刘彦呈张珍睿
微电机 2019年12期
包芳泉,郭昊昊,刘彦呈,张珍睿,李 浩
(大连海事大学 轮机工程学院,辽宁 大连 116026)
0 引 言
永磁同步电机(Permanent Magnet Synchronous Motor,PMSM)因其具有结构简单、调速范围宽、功率因数高、功率密度高等优势,在各种工业领域得到了广泛应用。因为具有在较宽调速范围内实现电流的无静差跟踪的能力,同步坐标比例积分控制器被广泛的用于PMSM的电流控制[1]。PMSM调速系统的控制性能很大程度依赖于电流调节器的调节能力[2-3],因此提升电流环动态性能对整个调速系统的控制性能具有重要的意义。
PMSM矢量控制期望通过坐标变换实现磁链分量和转矩分量的解耦,以进行独立的控制。虽然同步坐标系下的PMSM模型能够实现静态解耦,但仍然存在动态耦合,电机转速越高,耦合程度就越严重[4]。经典的矢量控制采用PI调节器分别对d、q轴电流进行负反馈调节,并没有考虑耦合问题,影响了电流环的动态控制性能。为改善解耦效果,国内外学者进行了大量的研究。电压前馈解耦控制可以提高电流环的响应速度,但电机参数的变化会影响解耦效果,并且当开关频率较低时不能实现完全解耦[5-6];文献[7-8]利用内模控制原理实现了解耦,使得电流环具有较强的鲁棒性,但内模控制对电机参数和电机模型有极强的依赖性,实用价值不高;动态解耦[9]要想在动态调节过程中使电流良好地跟踪给定,需要较大的比例增益,这使得系统超调量增大;神经网络逆系统解耦控制[10]对电机参数不敏感,但需要大量的实验数据进行离线训练,不利于推广使用;复矢量解耦控制[11]根据零极点对消原理,实现了d、q轴的完全解耦,提高了电流环的动态性能。但是电流环存在的计算延时和逆变器输出延时对系统的响应速度和稳定性有着严重影响,并且延时的存在会加剧d、q轴的耦合[12]。
目前常用的减小电流环延时的方法有:使用计算速度更快的处理器,如可编程逻辑器件(Field Programmable Gate Array,FPGA)[13];使用开关频率更高的开关管,如碳化硅MOSFET[14];或者利用无差拍控制、预测控制等算法对延时进行补偿[15]。但是这些方法或者增大了硬件成本,或者依赖电机参数,工程上不实用。
本文采用复矢量方法建立了电机模型,调整电流调节器结构,引入一个随转速变化的零点,实现解耦。分析了电流环延时环节,通过改进电流采样方法并使用双采样双更新策略,大大减小了延时。仿真结果表明,采用复矢量解耦加双采样双更新的新算法后,电流环动态性能有明显的提升。
1 永磁同步电机数学模型
在忽略电机铁心饱和、涡流和磁滞损耗、谐波反电动势的条件下,构建同步旋转坐标系下的数学模型,其定子电压方程为
(1)
定子磁链方程为
(2)
将式(2)代入式(1)可将定子电压方程化为:
(3)
式中,ud、uq分别为定子电压直轴、交轴的分量;R为定子电阻;id、iq分别为定子电流直轴、交轴的分量;ψd、ψq分别为定子磁链直轴、交轴的分量;ωe为电角速度;ψf为永磁体磁链;Ld、Lq分别为电感直轴、交轴的分量,对于表贴式永磁同步电机Ld=Lq=Ls。由定子电压方程可以看出,d轴和q轴之间存在交叉耦合项,耦合项的影响会随着速度的增高而变大。

(4)
其中,e=jωeψf为电机反电动势,将其看作一个干扰项,永磁同步电机复矢量形式的传递函数为
(5)
2 永磁同步电机解耦控制
2.1 d、q轴耦合分析
复矢量形式的电流环控制框图如图1所示。此时电流环开环传递函数和闭环传递函数分别为
(6)
(7)
为了使调节器的零点对消掉被控对象大惯性环节的极点,取KP/KI=Ls/R。由式(6)可知,调节器的零点为-KI/KP,被控对象大惯性环节的极点为-R/Ls-jωe,两者并不能完全对消。由于电流环为单位反馈系统,则调节器零点也是闭环传递函数的零点,被控对象极点对闭环传递函数的主导极点影响极大。闭环传递函数的零极点分布如图2所示,当电机转速低时闭环传递函数中的零点与主导极点可近似抵消,电流环的动态性能由非主导极点决定,而非主导极点与虚轴的距离较远,故电流环峰值时间短,系统响应速度快。当转速高时耦合项影响增大,主导极点向虚轴方向移动,而零点不变,两者不再能够相互抵消,此时电流环的动态性能由主导极点决定,由于主导极点离虚轴较近,使系统峰值时间增长,响应速度变缓。故对永磁同步电机进行解耦控制是有利于提升电流环动态性能。

图1 电流环控制框图

图2 未解耦时电流环零极点分布图

图3 电压前馈解耦电流环控制框图
2.2 复矢量解耦控制
常用的解耦控制方法是电压前馈解耦,其控制框图如图3所示。电压前馈解耦电流环开环和闭环传递函数分别为
(8)
(9)
调节器的零点和被控对象的极点分别为-KI/KP和-R/Ls,两者之中都不包含 ,不会随转速的变化而变化。此时调节器的零点和被控对象的极点也是闭环传递函数的零点和极点,其分布与图2中转速为零时零极点分布相同,零点与主导极点完全相消,电流环可以获得良好的动态性能。
由图3可以看出,电压前馈解耦的前馈项中包含电感Ls。由于磁路饱和的作用,电机工作时电感值会随着电流的变化而变化。因此电压前馈解耦对电机参数敏感程度高。复矢量解耦能够很好地解决这个问题。复矢量解耦的思路是调整调节器的结构,使调节器的零点变为-R/Ls-jωe,从而与被控对象的极点完全抵消。复矢量解耦电流环控制框图如图4所示,系统开环和闭环传递函数分别为
(10)
(11)

图4 复矢量解耦电流环控制框图
调节器的零点和被控对象的极点分别为-KI/KP-jωe和-R/Ls-jωe,零极点会随着电机转速同时变化,但当KP/KI=Ls/R时零极点可完全相消。闭环传递函数的零极点分布如图5所示。并且解耦项中不包含电感参数,故复矢量解耦与电压前馈解耦相比对电机参数不敏感,在获得良好动态性能的同时系统鲁棒性更强。
3 电流环延时与动态性能
3.1 电流采样方式与延时分析
采用28335DSP作为控制系统的处理器,通过定时器增减计数实现三角载波,设置当定时器为0时开始执行矢量控制中断子程序,开始一个PWM周期。当定时器达到最大值时退出矢量控制中断子程序,返回主程序。
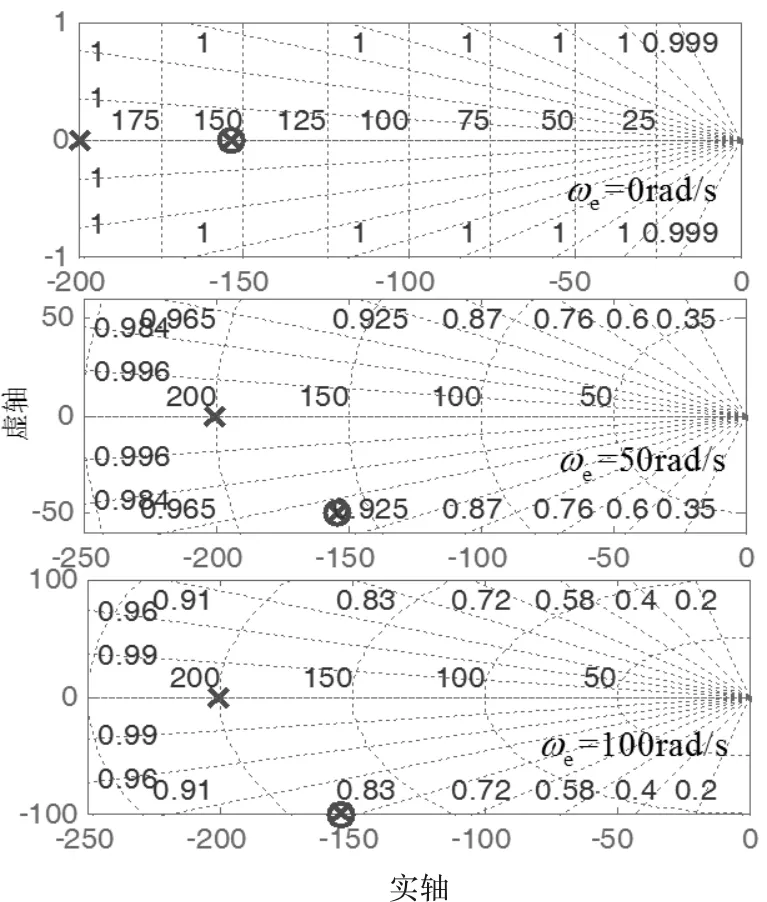
图5 复矢量解耦时的零极点分布图
典型的电流采样与PWM更新模式如图6所示,每个PWM周期开始时刻进行电流采样,并且在前半个载波周期共进行4次电流采样,求4次采样数值的平均值作为本周期的电流值。在下一个载波周期开始后利用上一个载波周期采样得到的电流值进行计算PWM占空比,并在载波顶点时刻更新PWM占空比。为避免开关管在一个PWM周期内多次动作,PWM更新需在零矢量处进行。在此种电流采样与PWM更新时序中载波周期Tc等于PWM周期Tpwm。
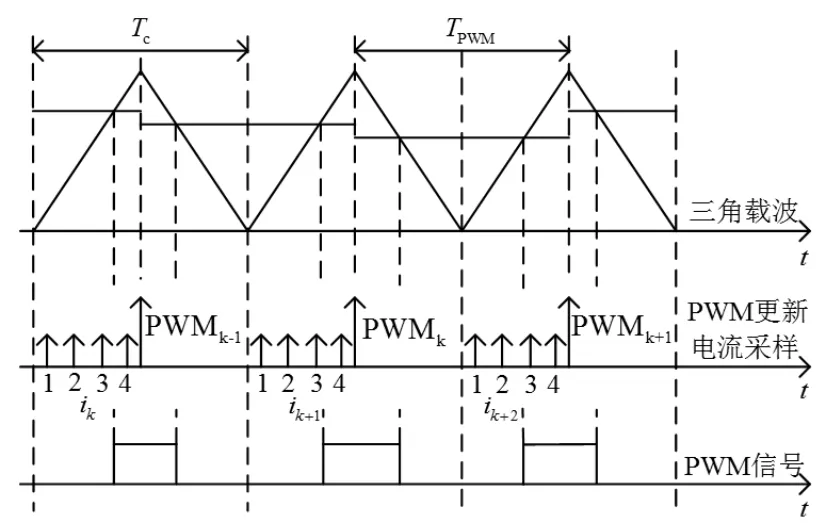
图6 电流采样与PWM更新典型时序图
由图6可知,调速系统中主要存在两种延时:一种是计算延时Tp,其主要是电流采样和处理器计算PWM占空比所占用的时间;二是逆变器输出延时Ti,是PWM更新到逆变器完成PWM占空比输出所占用的时间。逆变器输出延时的长短与占空比的大小有关,一般取逆变器输出延时为PWM周期Tpwm的一半。图6所示的电流采样与PWM更新模式系统总延时为
T∑=Tp+Ti=1.5Tc+0.5Tc=2Tc
(12)

图7 包含延时环节的电流环动态结构图
电流环计算延时和逆变器输出延时可以用一阶滞后环节表示,分别为1/(Tps+1)和1/(Tis+1),将其变换到旋转坐标系下,对应的表达式分别为1/(Tps+1+jωeTp)和1/(Tis+1+jωeTi)。包含延时环节的复矢量解耦电流环动态结构图如图7所示。根据图7,电流环的开环传递函数为
(13)
其中,A=Tps+1+jωeTp,B=Tis+1+jωeTi。
将小时间常数Tp和Ti合并,简化后的电流环开环传递函数为
(14)
由电流环开环传递函数得到闭环传递函数:
(15)

当开关频率为1000 Hz,电机电角速度为50 rad/s时,包含延时环节的电流环闭环传递函数零极点分布如图8所示。由图8可以看出由于延时环节的存在,增加了一个极点,加重了d、q轴的耦合,影响了电流环动态性能。为获得更好的电流环动态性能,需要尽量减小系统延时。
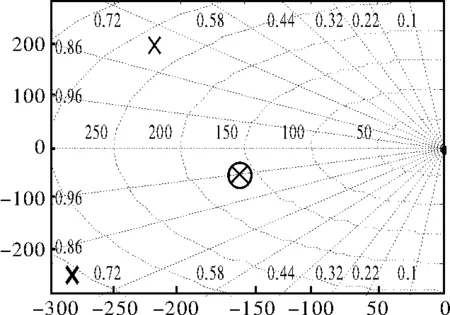
图8 包含延时环节的电流环零极点分布图
3.2 电流采样方式的改进
图6所示的电流采样方式占用了一个载波周期,造成了较大的系统延时。半个载波周期内进行了四次采样,使得ADC工作频率较高,并且此种电流采样方式没有有效地去除相电流中的纹波成分。
电机的相电压为如图9所示的矩形波,当电机空载时,由于电机为感性负载,相电流波形如图9所示。相电流的波形在一个载波周期内呈周期性变化,在载波周期开始和中点时刻,即零矢量作用的中点时刻电流纹波过零。因此若在这两个进行电流采样,可以得到一个载波周期的平均电流值,消除了纹波的影响。图9中的重构电流是在载波周期开始时刻进行采样,经过采样保持作用重构出的相电流信号。

图9 零矢量中点电流采样
改进后的电流采样方法与传统的电流采样方法相比,大大减少了电流纹波的影响,且一个载波周期只需采样一次,电流采样不再需要单独占用一个完整的载波周期,减小了系统延时,为改进电流采样与PWM更新时序、拓宽带宽提供了条件。并且,无论是SPWM还是SVPWM,在PWM周期的开始和结束时刻均为零矢量作用时刻。零矢量作用时逆变器开关管不动作,因此在零矢量作用时进行电流采样可以有效地减少开关噪声的影响。
3.3 双采样双更新策略
随着技术的发展,DSP的运算速度不断得到提高。当下的电机DSP数字控制系统,电流采样和计算延时普遍不会超过半个载波周期。由图9可以看出在载波周期开始时刻和中间时刻进行电流采样,理论上都可以消除纹波的影响。为了尽可能缩小系统延时,拓宽系统带宽,提高电流环频率响应,对电流采样与PWM更新时序进行了改进,改进后的时序如图10所示。在载波周期开始时刻进行一次电流采样,计算出的占空比在载波周期中点进行更新,并且在载波周期中点时刻再进行一次电流采样,本次计算得出的占空比在下一个载波周期的开始时刻进行更新。这样每个载波周期都会进行两次电流采样和两次PWM占空比更新。PWM周期Tpwm就缩短为载波周期Tc的一半,逆变器输出延时就相应的缩短为0.25Tc。改进后计算延时Tp为0.5Tc,则系统总延时为:
T∑=Tp+Ti=0.5Tc+0.25Tc=0.75Tc
(16)
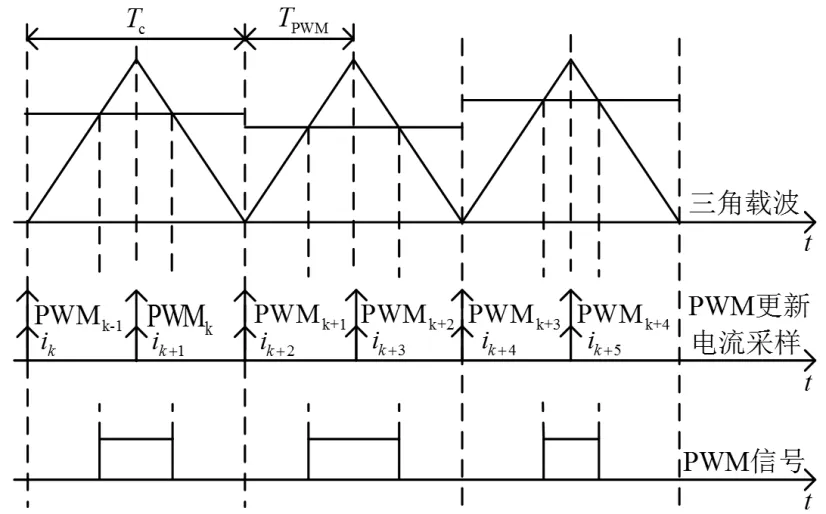
图10 改进电流采样与PWM更新时序
4 仿真验证
为验证复矢量解耦和双采样双更新策略的有效性,在Matlab/Simulink环境下搭建了相应的仿真模型。采用的电机参数如表1所示。
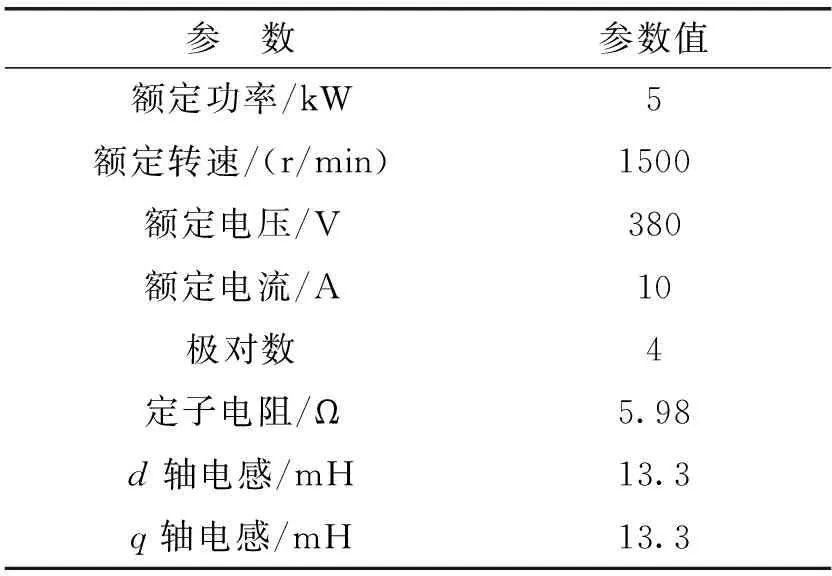
表1 电机参数
图11和图12分别为电机转速为500 r/min和1000 r/min时的d、q轴电流,负载转矩在1s时刻由0阶跃至3 。对比两图可知,转速为1000 r/min时,当突加转矩负载时d、q轴电流波动范围和调节时间都明显增大,这与耦合现象随转速增加而加剧的理论分析相吻合。图13为转速500 r/min时采用双采样双更新策略的d、q轴电流,负载转矩同样在1s时刻由0阶跃至3 。与图11对比,采用双采样双更新策略后,d轴电流波动范围减小约36%,调节时间减小约39%,q轴电流超调量减小约25%。图14和图15为转速分别设定为500 r/min和1000 r/min,采用新算法,即复矢量解耦加双采样双更新策略,进行相同的试验得到的d、q轴电流。与图11和图12对比,采用新算法后,当转速为500 r/min时,d轴电流波动范围减小约94%,波动基本可以忽略,并且调节时间减小约66%,q轴电流超调量减小约46%;当转速为1000 r/min时,d轴电流波动范围减小约95%,调节时间减小约25%,q轴电流超调量减小约50%。

图11 转速500r/min时d、q轴电流
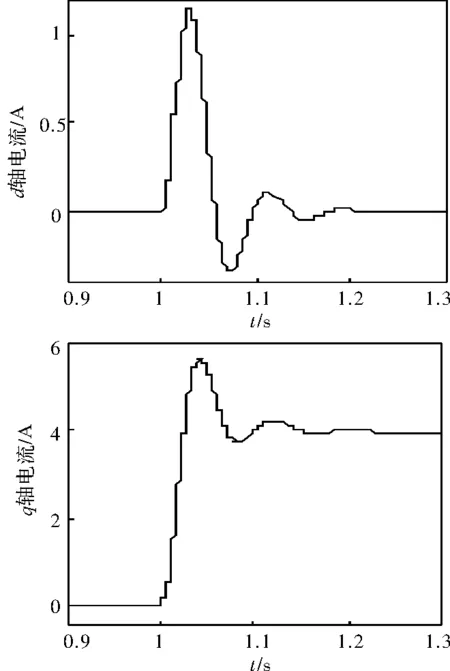
图12 转速1000r/min时d、q轴电流
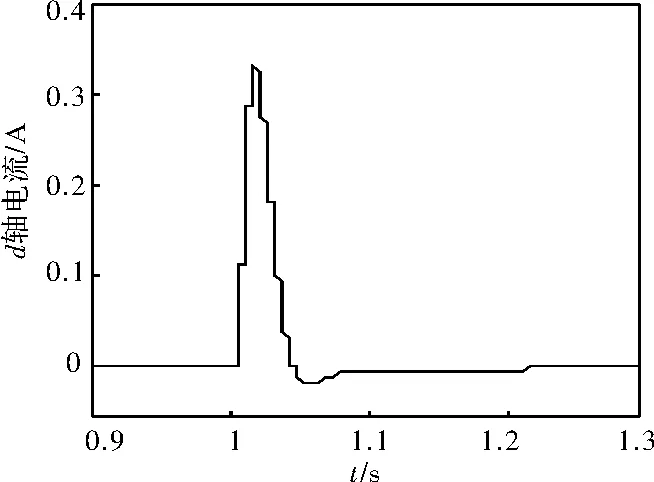
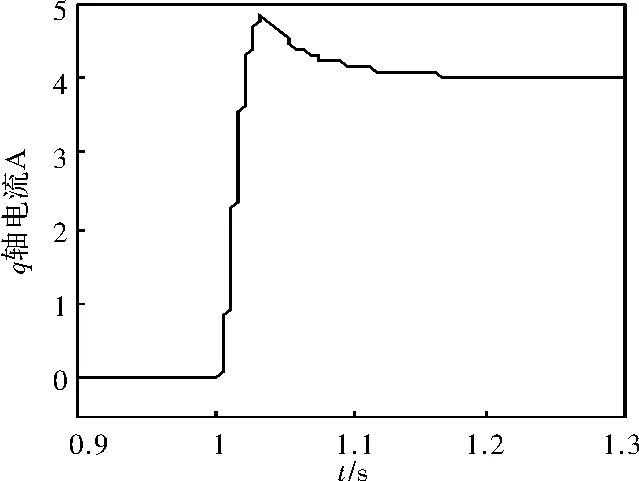
图13 采用双采样双更新策略的d、q轴电流
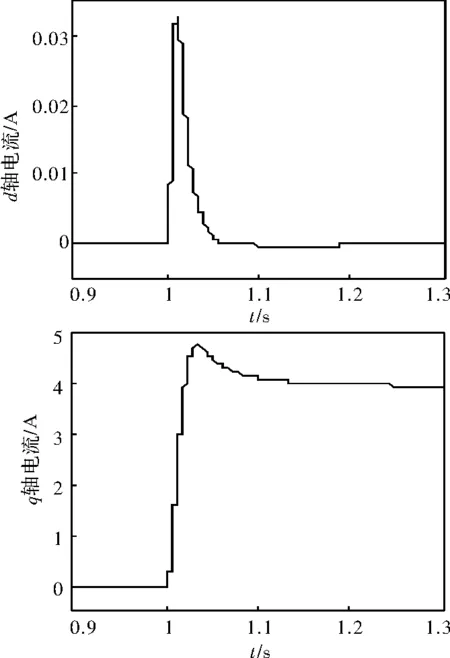
图14 采用新算法转速500r/min时d、q轴电流
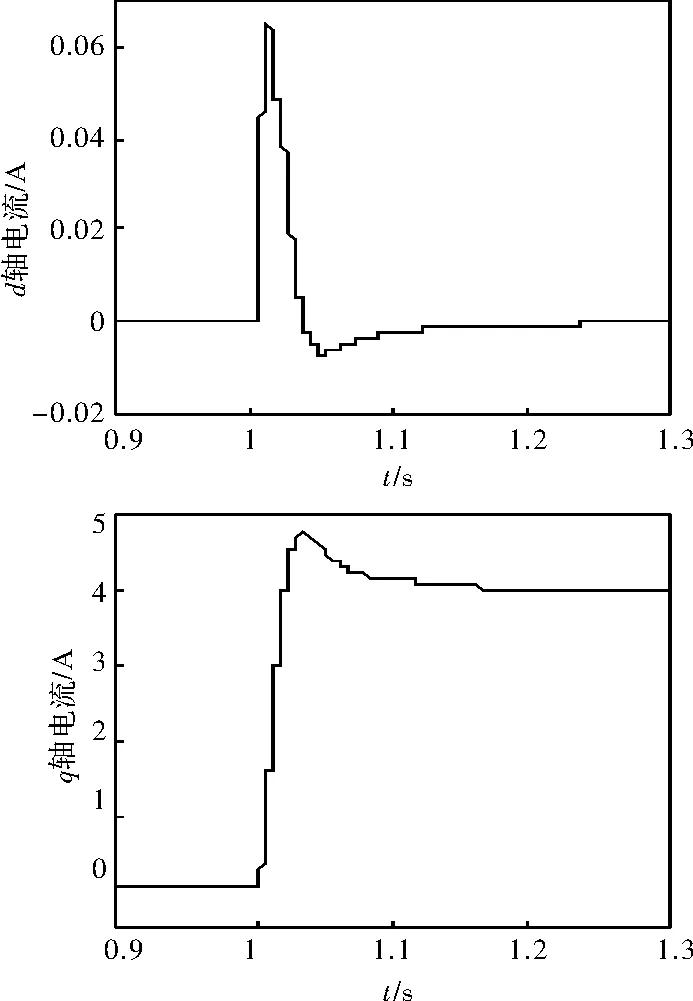
图15 采用新算法转速1000r/min时d、q轴电流
5 结 语
本文一方面针对永磁同步电机电流环d、q轴动态耦合问题,使用复矢量解耦方法进行解耦;另一方面,针对电流环延时环节加剧d、q轴耦合,影响电流环动态性能的问题,改进了电流采样方式后采用双采样双更新策略,显著减小了电流环延时。仿真结果表明所提方法能够明显提升电流环动态性能。
猜你喜欢
数理化解题研究(2020年13期)2020-05-07 03:29:02
数学物理学报(2019年5期)2019-11-29 07:46:30
测控技术(2018年7期)2018-12-09 08:58:46
高中生·天天向上(2016年9期)2016-11-22 09:10:34
光学精密工程(2016年4期)2016-11-07 09:05:39
电源技术(2015年9期)2015-06-05 09:36:06
电测与仪表(2015年20期)2015-04-09 11:53:48
电测与仪表(2015年3期)2015-04-09 11:37:42
电测与仪表(2014年11期)2014-04-04 09:21:20
China Journal of Accounting Research(2012年4期)2012-04-01 17:32:46