
面向滑坡的旋翼机正视/侧视航摄处理与分析
2019-03-22 01:12陈元鹏王凤李英成刘沛王恩泉
遥感信息 2019年1期
陈元鹏,王凤,李英成,3,刘沛,王恩泉
(1.自然资源部国土整治中心,北京 100035;2.自然资源部航空遥感技术重点实验室,北京100039;3.北京市低空遥感数据处理工程技术研究中心,北京100039)
0 引言
在我国滑坡作为一种多发性地质灾害,给人民的生命和财产造成了严重的威胁。如近两年发生的陕西山阳滑坡、深圳光明新区滑坡、四川茂县滑坡等,造成的人员伤亡和经济损失惨重。有效监测滑坡滑落趋势、预估滑坡影响大小,需要更准确的测量技术为滑坡监测、预估提供基础空间地理信息数据[1]。
目前滑坡监测方法主要有大地测量法、近景摄影测量、GPS变形监测等技术方法[2]:大地测量法一般采用水准仪、全站仪、经纬仪等高精度光学测量仪器,通过测角和测距实现对滑坡的监测,该方法测量点位精度高,但受天气和地形条件的影响,外业周期长、人力成本高,不利于连续观测;近景摄影测量法是将数码相机放在两个不同位置的固定观测点,对滑坡摄影构成立体像对进而实现滑坡点三维坐标量测,该方法操作简单,精度较低,且由于滑坡坡面有倾斜,获取影像分辨率不一致,影响后续分析精度;GPS变形监测法是利用GPS卫星信号进行后方交会测量,求出待测点的三维坐标,然后用新值与初始坐标之差反映待测点的运动[3],该方法简单、精度高,但易受地形影响。随着无人机遥感系统的应用推广,利用无人机拍摄的照片所获得的高程数字模型开展滑坡动态分析已成为一种新的手段[4],然而滑坡坡度所导致的测图分辨率不一致又成为影响后续数据分析的难题。为解决上述问题,本文提出了一种利用多旋翼无人机搭载平行于滑坡角度的倾斜单相机进行变高航空摄影测量获取滑坡地理信息数据的方法。该方法是在完成传感器改造后,集成一套无人旋翼机正视/侧视航空摄影测量遥感系统,在四川滑坡地质灾害点开展相关测试,按照航摄分区设计航线,在完成航空摄影后,开展数据处理与分析,形成一套完整的基于滑坡角度的无人旋翼机侧视航空摄影测量解决方案。
1 侧视相机安装原理
进行滑坡地质灾害航空摄影时,由于滑坡存在倾斜角度,会出现以下现象:相同航摄高度导致不同航线影像分辨率不一致,且随着滑坡坡度的提升分辨率差异增大;即使同一条航线垂直拍摄,由于一张像片覆盖的滑坡带有倾斜角度也会存在单张影像分辨率不均匀。为验证该现象是否正确,本文从理论上进行了验证,验证原理如下:
在以下计算中,设H为相对航高,f为相机焦距,GSD为单个像元分辨率,α为滑坡坡面相对于地平面角度,β为视场半角,μ为像元物理尺寸,γ为任意像元与其投影到地面点的连线与该像元所在的的行或列最边缘的点与其投影到地面点的连线之间的夹角。
1.1 正视相机安装
(1)投影到地面时地面分辨率计算。地面分辨率不变。正视相机安装时,如图1所示,影像投影到地面时地面分辨率:
(1)
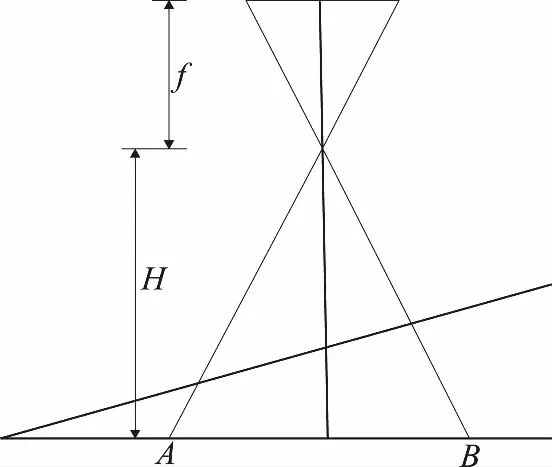
图1 正视相机安装投影到地面地面分辨率
(2)投影到坡面时地面分辨率计算。地面分辨率发生变化。正视相机安装时,如图2所示,影像投影到坡面时地面分辨率:
(2)
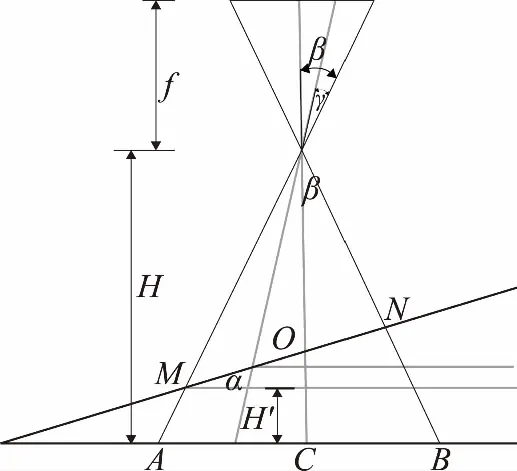
图2 正视相机安装投影到坡面地面分辨率
结合公式(2)可计算正视相机安装时单张影像覆盖的斜坡面范围:

(3)

(4)
式中:MN为覆盖范围长边;M′N′为覆盖范围短边;tanβ=W×μ/2f;tanβ′=S×μ/2f;W为成像CCD的长边;S为成像CCD的短边。由此可见其覆盖范围与斜坡不同位置有关。
1.2 侧视相机安装
(1)投影到地面时地面分辨率计算。地面分辨率变化。侧视相机安装时,如图3所示,影像投影到地面时地面分辨率:
(5)
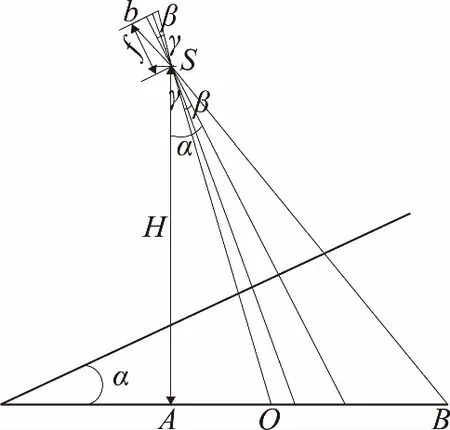
图3 侧视相机安装投影到地面地面分辨率计算
(2)投影到坡面时地面分辨率计算。地面分辨率不变。侧视相机安装时,如图4所示,地面分辨率:
(6)

图4 侧视相机安装投影到坡面地面分辨率计算
由于焦距、像元尺寸以及航高为定值,因此地面分辨率不变。
侧视相机安装时单张影像覆盖的斜坡面范围:
(7)
(8)
式中:AB为斜坡面覆盖范围长边;A′B′为斜坡面短边;W为成像CCD的长边;S为成像CCD的短边。
通过以上原理分析可知,安装侧视相机时飞行投影到坡面的地面分辨率以及单张影像覆盖的地面(坡面)均不变。
2 旋翼无人机航摄遥感系统集成
无人旋翼机航摄遥感系统主要有搭载平台、传感器以及飞行控制系统3个部分[5],根据摄区概况、航摄目标以及航摄要求选取六旋翼无人机作为搭载平台,该平台拆装方便,对起降场地无特殊要求,且相对载荷大、重量轻、续航时间比较长。
由于测区环境恶劣,仪器设备回收困难,因此传感器选用价格相对低廉、测绘效果相对较好的索尼A7R相机。为减少飞行架次,对比分析正视/侧视相机安装对滑坡灾害体的数据获取效果以及解译情况,将两台相机固定在一起安装于无人旋翼机遥感系统。在选定设备后首先进行相机的检校,而后根据航摄区域范围以及测区滑坡的实际斜坡角度进行传感器的集成与改造,改造时为减轻重量采用铝合金做成支架将两台相机(正视/侧视)固定在一起,其中正视相机垂直安装,倾斜相机按照滑坡角度进行安装,安装后效果如图5所示。

图5 索尼A7R双拼传感器系统
3 试验与分析
3.1 测区概况
飞行测试区域位于四川省成都市龙泉山脉。该区域以山区为主,西端地势高,海拔从510 m至700 m,高差约190 m,航摄面积约1.6 km2,滑坡角度大致为20°。试验区域四角点经纬度坐标依次为D1(30.553,104.271)、D2(30.552,104.287)、D3(30.539,104.287)、D4(30.540,104.270)。
3.2 控制点布测与质检
在布设地面控制点时应考虑地形类别、成图方法和成图精度要求,此外还要考虑航摄比例尺对成像质量的影响、测区地形地貌条件、仪器设备和技术条件以及内外业任务的平衡情况等[6]。本次试验根据航摄区域情况以及航空摄影测量外业规范[7-8]要求,摄区共布设控制点23个。控制点选取遵循分布均匀,点位清晰,特征明显,GPS信号充分的原则,在内业完成选点后,交给外业人员,若实地信号不明显或存在点位不清晰情况时,可以根据实地情况实时调整点位情况。详细点位布设以及实测点位情况详见图6、图7、图8。

图6 控制点布设情况

图7 刺点片

图8 实地照片
在完成控制点野外GPS数据采集后,利用GPS数据质量检查软件“TEQC”后,证明数据利用率为99%,利用率较高,多路径误差(L1、L2)分别为0.19和0.18,误差比较小,观测数据与周跳比为58 169,反映出周跳修复能力比较强,证明该套数据可靠,而后利用商用软件GAMIT完成GPS数据解算得到所有控制点的坐标。
3.3 航线设计、数据获取与质量检查
实验利用第3节集成的旋翼无人机航摄遥感系统,设计飞行一个架次同时获取两类不同数据(正视/侧视),本次设计六条航线,采取变高飞行方式,在第一条航线飞行完成后,爬高到预定高度从而进行第二条航线飞行,飞行示意图如图9所示。

图9 航线示意图
若像元大小μ、传感器焦距f、设计地面分辨率GSD、航向重叠度m、计算出相对航高H、基线长度S1、曝光点间隔T(相机航向像元x个、旁向像元y个),则相对航高以及基线长度满足公式(9):
(9)
在图10中,S为航线间隔,L1表示第一条航线,L2表示第二条航线,H表示侧视安装相机相对于倾斜面的相对航高,S2表示航线沿垂直飞行方向向上移动的距离,Δh表示L1航线与L2航线相对水平面高差,α表示滑坡倾角,则航线移动距离S2以及爬升高度Δh分别计算如下:
S2=S×cosα,Δh=S×sinα
(10)
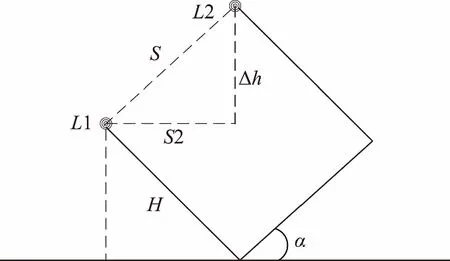
图10 侧视安装相机飞行参数计算
通过本次飞行设计正视/侧视安装相机分别获取影像189张,图11、图12为两张影像在飞机飞行到同一位置时刻的曝光影像。

图11 正视安装相机获取影像

图12 侧视安装相机获取影像
通过检查获取的无人机遥感原始影像,发现影像航向、旁向重叠度以及影像质量能够满足成图要求。
3.4 数据处理
1)控制点数据处理。由于获取的外业控制点均为WGS84坐标系下的坐标,其基准面为参考椭球面[9],在进行正视安装相机DOM生产时,不需要进行坐标转换,若进行侧视安装相机投影到滑坡投影面DOM生产时,必须进行控制点的坐标转换。
根据选择的滑坡投影面(定义一个局部坐标系)将所有的控制点(如有)坐标投影到滑坡面上,同时将辅助用的所有GPS点坐标投影到滑坡面上。转换方式如下:
首先根据设计的航线即曝光点位置确定转换后坐标系的原点为1号曝光点,因此坐标转换共需要3步:首先将原始坐标系原点移动至1号曝光点位置;其次将移动后的坐标系绕Z轴旋转belta角(该角度计算方法为航线的飞行方向即根据每条航线飞行的角度计算),最后将旋转后的坐标系旋转alpha角(该角度计算方法为相机相对于正视相机的安装角度)。
若点A在WGS-84坐标系中的坐标为(X,Y,Z),该点A在转换后坐标系中的坐标为(X’,Y’,Z’),因此二者之间转换如图13、图14、图15所示。
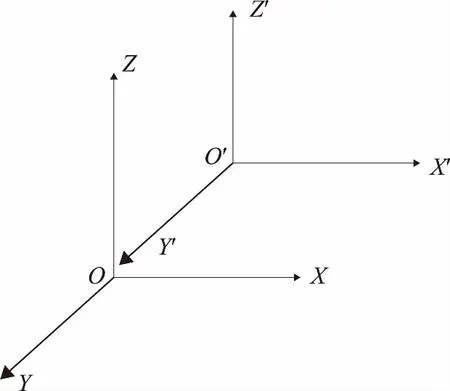
图13 坐标原点移动

图14 绕Z轴旋转belta角度

图15 绕X轴旋转alpha角度
根据以上移动旋转关系得出两坐标系之间的转换关系如下公式求解[10]:
(11)
通过上述转换关系编程实现所有控制点数据的投影变换。
2)影像数据处理。将正视安装相机导出的影像数据、POS数据以及测量控制点坐标导入软件进行处理,最终生成DOM。将侧视安装相机导出的影像数据投影变换过的POS数据以及投影变换的控制点导入软件进行处理,最后生成投影到滑坡面上的DOM。参见图16、图17。

图16 正视处理效果图
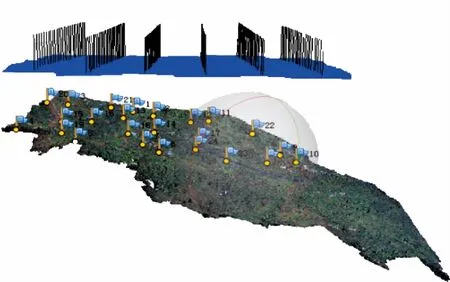
图17 侧视处理效果图
3.5 试验结果与分析
1)正视成图数据精度分析。根据数据处理结果可知,正视飞行时成图面积1.6 km2,常规成图如图18所示。

图18 正视情况下DOM、DEM晕渲图
正视情况下成图精度点位误差表格如表1、表2所示。

表1 常规情况下控制点点位误差统计表
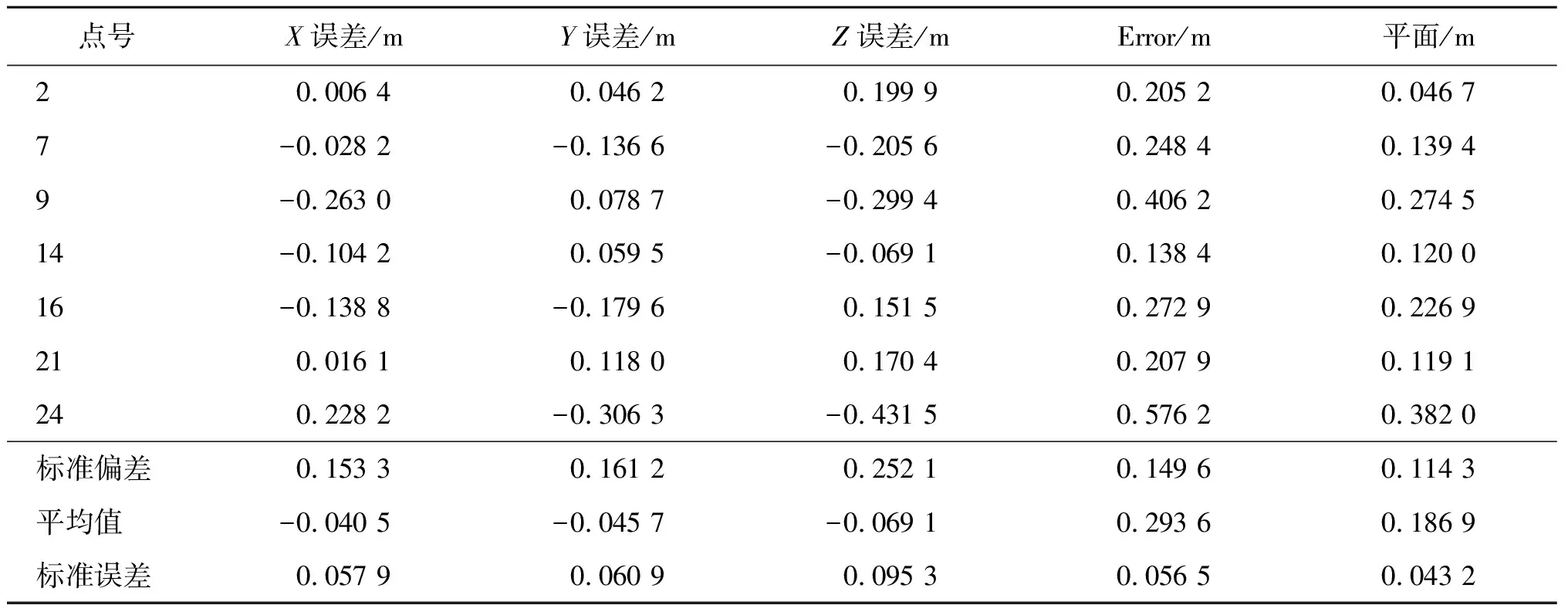
表2 检查点点位误差统计表
从以上2个表格可以看出,正视常规成图情况,控制点平面最大误差为0.613 3 m,高程最大中误差为0.593 3 m。符合低空空三规范[11]中1∶1 000山地定向点平面/高程限差不大于0.8/0.6 m的要求。检查点最大平面误差为0.382 m,高程中误差为-0.431 5 m,符合低空空三规范中1∶1 000山地检查点平面/高程限差不大于1.4/1.0 m的要求。
2)侧视成图数据精度分析。根据数据处理结果可知,侧视飞行时成图面积1.9 km2,大于正视成图。成图如图19所示。
侧视情况下DOM、DEM晕渲图如图20所示,侧视成图精度点位误差表格如表3、表4所示,侧视成图如图21所示。

图19 正视情况下常规成图控制点/检查点精度分析图

图20 侧视情况下DOM、DEM晕渲图
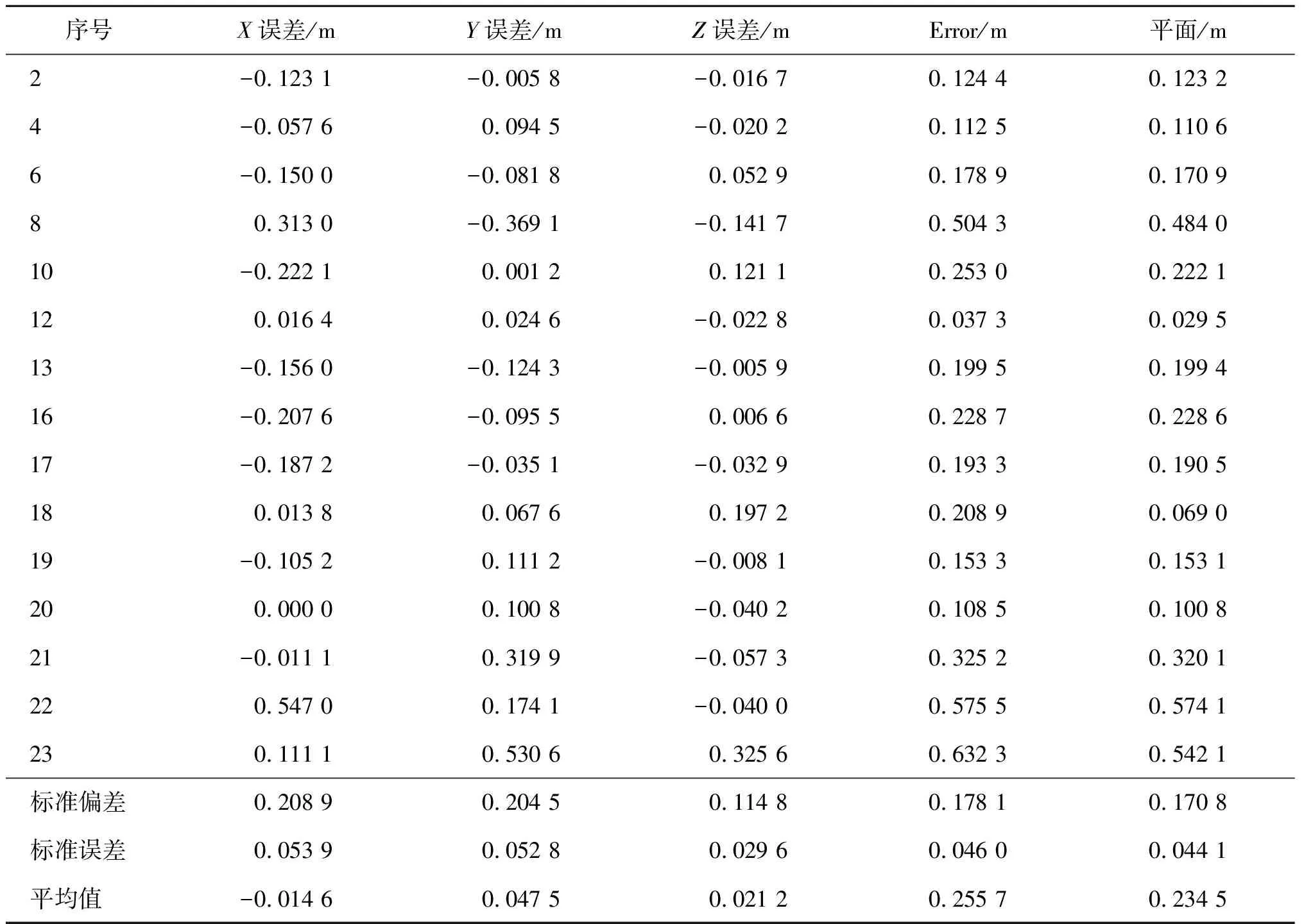
序号X误差/mY误差/mZ误差/mError/m平面/m2-0.123 1-0.005 8-0.016 70.124 40.123 24-0.057 60.094 5-0.020 20.112 50.110 66-0.150 0-0.081 80.052 90.178 90.170 980.313 0-0.369 1-0.141 70.504 30.484 010-0.222 10.001 20.121 10.253 00.222 1120.016 40.024 6-0.022 80.037 30.029 513-0.156 0-0.124 3-0.005 90.199 50.199 416-0.207 6-0.095 50.006 60.228 70.228 617-0.187 2-0.035 1-0.032 90.193 30.190 5180.013 80.067 60.197 20.208 90.069 019-0.105 20.111 2-0.008 10.153 30.153 1200.000 00.100 8-0.040 20.108 50.100 821-0.011 10.319 9-0.057 30.325 20.320 1220.547 00.174 1-0.040 00.575 50.574 1230.111 10.530 60.325 60.632 30.542 1标准偏差0.208 90.204 50.114 80.178 10.170 8标准误差0.053 90.052 80.029 60.046 00.044 1平均值 -0.014 60.047 50.021 20.255 70.234 5

表4 侧视情况下检查点点位误差统计表

图21 侧视情况下成图控制点/检查点精度分析图
从以上2个表格可以看出,侧视常规成图情况,控制点平面最大误差为0.574 1 m,高程最大中误差为0.325 6 m。符合低空空三规范中1∶1 000山地定向点平面/高程限差不大于0.8/0.6 m的要求。检查点最大平面误差为1.275 1 m,高程中误差为-0.906 8 m,符合低空空三规范中1∶1 000山地检查点平面/高程限差不大于1.4/1.0 m的要求。
3)正视/侧视影像目标体解译。在图22中,左面为正视成图,右面为倾斜成图,从以下截图能够明显看出,倾斜成图对目标体而言成像更为清晰,更有助于目视解译。
在完成四川省成都市的滑坡灾害体试验后,为进一步验证本文的方法,在新疆新源县展开了1 km2测区左右的滑坡正视/侧视数据分析与试验,其解译结果如图23所示。

图22 正视/侧视成图目标体解译对比分析图

图23 侧视/正视成图滑坡体解译对比分析图
4 结束语
本文在对存在倾斜角度的滑坡体正视/侧视航空摄影对地面分辨率影响深入分析的基础上,为减少飞行架次以及其他影响对比分析结果的因素,顺利完成对比试验,采用铝合金结构对两台相同传感器进行集成安装为双拼传感器系统,集成的该双拼传感器系统在一个传感器正视摄影情况下另一个平行于滑坡角度,而后将该双拼传感器系统安装与六旋翼无人机遥感系统。在完成装备集成的情况下,利用该装备在四川滑坡地质灾害点开展相关试验。
试验证明,按照滑坡角度安装相机、并且按照航线分区开展针对滑坡体的航空摄影测量,数据处理时将侧视飞行获取的影像投影到坡面生成DOM,更有利于分辨率一致,同时针对倾斜测量目标能够减小正视航摄影像信息量少,细节损失严重的现象;另外本次试验正视成图覆盖面积1.6 km2,侧视成图覆盖面积1.9 km2,结果表明对于滑坡地灾点,倾平行于滑坡角度成图在同等架次同等航线情况下覆盖面积更大。
本文通过原理分析与试验验证了旋翼机按航线分区、平行于被摄目标倾斜角度开展航空摄影对于滑坡灾情分析的可行性与有效性,但由于时间以及数据量问题,未能分析滑坡体量,下一步将开展多次试验,同时分析滑坡体量用于进一步验证该方法与理论的正确性。
猜你喜欢
数学物理学报(2021年1期)2021-03-29
全球定位系统(2021年1期)2021-03-26
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
学生天地·小学低年级版(2019年5期)2019-06-05
学生天地(2019年15期)2019-05-05
航空知识(2019年1期)2019-01-11
环球飞行(2018年7期)2018-06-27
北京航空航天大学学报(2017年4期)2017-11-23
中国工程咨询(2017年12期)2017-01-31
中国房地产业(2016年9期)2016-03-01
