
不同粒度遥感信息的非线性优化Otsu分割算法
2019-03-22 01:37黄冬梅孙婧琦何婉雯张明华王振华
遥感信息 2019年1期
黄冬梅,孙婧琦,何婉雯,张明华,王振华
(1.上海电力学院,上海 200090;2.上海海洋大学 信息学院,上海 201306)
0 引言
遥感具有覆盖面广、光谱信息丰富及不同粒度应用需求的特点。图像分割是指把图像分成各具特性、互不相交像元集合的过程[1]。将遥感影像视为一类特殊的图像,对其进行分割可提取不同地物类别,实现从数据,信息到知识的转变[2-7]。遥感影像蕴含了不同粒度的空间内容,而多粒度遥感信息提取就是对遥感影像不同表达层次的内容进行分割[8]。例如基于遥感影像的海岛信息提取,若信息提取的需求是海岛面积普查,则只需将岛屿和海水进行分割,将此称为粗粒度分割,若信息提取的需求是海岛土地利用变化检测,则需将岛屿上的不同地物类别进行分割,将此称为细粒度分割。
阈值分割是图像分割方法之一[9-11]。国内外学者进行了大量的研究,如日本学者Otsu基于聚类思想提出了最大类间方差图像分割算法(Otsu算法),该算法计算简单且不受图像亮度与对比度影响[12]。Reddi等利用迭代方法将Otsu算法推广为多阈值图像分割算法[13]。Liao等提出利用查表方法改进多阈值Otsu算法,降低了图像分割算法计算时间[14]。Liu等兼顾像素点以及其邻域像素的平均灰度分布,将一维Otsu算法推广至二维,改善了抗噪性[15]。Zhou等提出了一种改进萤火虫算法的新图像分割算法,解决了二维图像阈值分割中计算时间长、精度低和错分多的现象[16]。Bhandar 等改进了蜂群算法,实现了用于遥感影像中不同类别地物的分割[17]。Guo等基于盒式滤波(box filter)提出了二维Otsu分割算法(two dimensional Otsu,2D-Otsu),解决了图像的分割时间长、精度低的问题[18]。Bhandar 等提出了基于群体智能的全局优化分割算法,解决了最优阈值穷尽搜索问题[19]。王玉等基于区域和统计的可变类分割方法,实现了图像类别数的自动确定(阈值确定)及图像的粗分割[20]。张金静等提出一种分布式合成孔径雷达(stop and reverse,SAR)图像分割算法,提高了图像的分割精度[21]。张海涛等基于阈值标记,提出了分水岭彩色图像分割算法,有效解决了过分割问题,具有较好的适用性和鲁棒性[22]。陈鹏翔等提出了一种区域拟合的背景去除图像分割模型,解决了图像分割模型的能量泛函非凸性和局部极小解的问题[23]。
上述学者从图像分割算法的改进、图像分割阈值的选择、图像分割精度的提高和图像分割时间的降低等方面对图像分割算法进行了改进和优化,完善了图像分割的理论体系。遥感影像作为一类特殊的图像,其不同于传统的二维图像,遥感影像具有丰富的光谱信息,但各波段间存在较大的数据冗余,此特性增加了图像分割的计算复杂性,另外遥感影像具有不同粒度的信息应用需求,即存在分割结果详细程度的各异性或提取目的认知的多层次性[24],此特性增加了图像分割的不确定性。
本文针对遥感影像数据冗余度高和多粒度的信息应用需求等特点,通过改进Otsu算法,设计了非线性优化Otsu分割算法:(1)将非线性优化图像分割算法作为约束条件,量化了不同粒度信息需求和阈值之间的数学关系,提高了多粒度遥感信息的分割速度;(2)引入主成分分析(principal components analysis,PCA)算法对遥感影像的多波段信息进行降维,降低了待分割影像的信息冗余度。以舟山海域的海岛地物信息提取为例,对非线性优化Otsu分割算法与Otsu,2D-Otsu,K均值聚类算法(K-means),模糊C均值聚类算法(fuzzy c-means,FCM)进行比较,阐述非线性优化Otsu分割算法的可行性。
1 非线性优化Otsu分割算法
1.1 非线性优化Otsu分割算法
本文通过改进传统的Otsu算法,量化了分割阈值与不同粒度信息需求之间的数学关系,将其设计为非线性优化Otsu分割算法,具体算法如下:
目标函数: minε
约束条件:
(1)

本文通过迭代计算求解不同地物类别间的灰度阈值,量化不同粒度的信息应用需求,同时通过最大类间方差判断,设置非线性优化Otsu分割算法的终止条件,减少算法遍历次数的同时提高算法时间效率。
1.2 非线性优化Otsu分割算法的计算流程
非线性优化Otsu分割算法在计算过程中通过不断比较类间方差,获取优化的分割阈值,提升多粒度信息分割精度。具体流程如下:
输入:待分割遥感影像I,阈值个数n
遥感影像除冗余:
利用PCA算法对输入的多波段遥感影像进行降维,得到一副大小为M×N的新图像Bnew,灰度级为L={1,2,…,i,…,l}
非线性优化Otsu分割过程:
IFn>2

则 计算结束;
ELSE IF

则 计算结束;
输出:优化的分割阈值。
1.3 算法复杂性分析

2 实证分析
2.1 实验数据
以浙江省舟山海域不同粒度的信息提取为例,验证本文提出地基于改进Otsu的非线性优化遥感影像分割算法的可行性;并与传统的Otsu、2D-Otsu、K-means、FCM分割算法进行精度对比。实验数据为Landsat-8影像(7个波段),拍摄时间为2013年8月6日,范围为从116°3′E到116°36′E,29°42′N到30°11′N。图1所示为遥感影像中波段4、3、2合成图像,大小为3 500×3 500个像素。
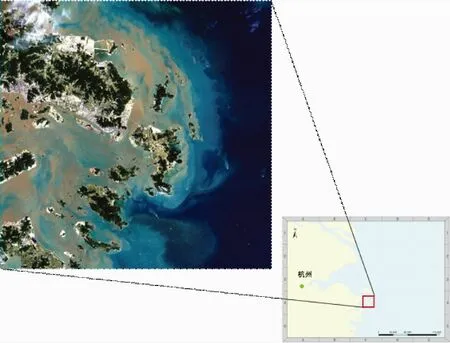
图1 研究区域与实验数据
图2所示为基于目视解译的不同粒度海岛地物类别分布图,图2(a)为粗粒度下舟山海岛岸线图,地物类别为海水和岛屿;图2(b)为细粒度下舟山海岛地物类别分布图,将岛屿细分割为:植被、人造建筑物和耕地;将海水粗分割为深海和浅滩。表1为不同粒度下地物类别的面积统计信息。

图2 基于目视解译的不同粒度海岛地物类别分布图
本文将目视解译的不同粒度海岛地物类别面积和空间分布视为“真值”,对基于不同分割算法的海岛地物类别信息进行精度比较。
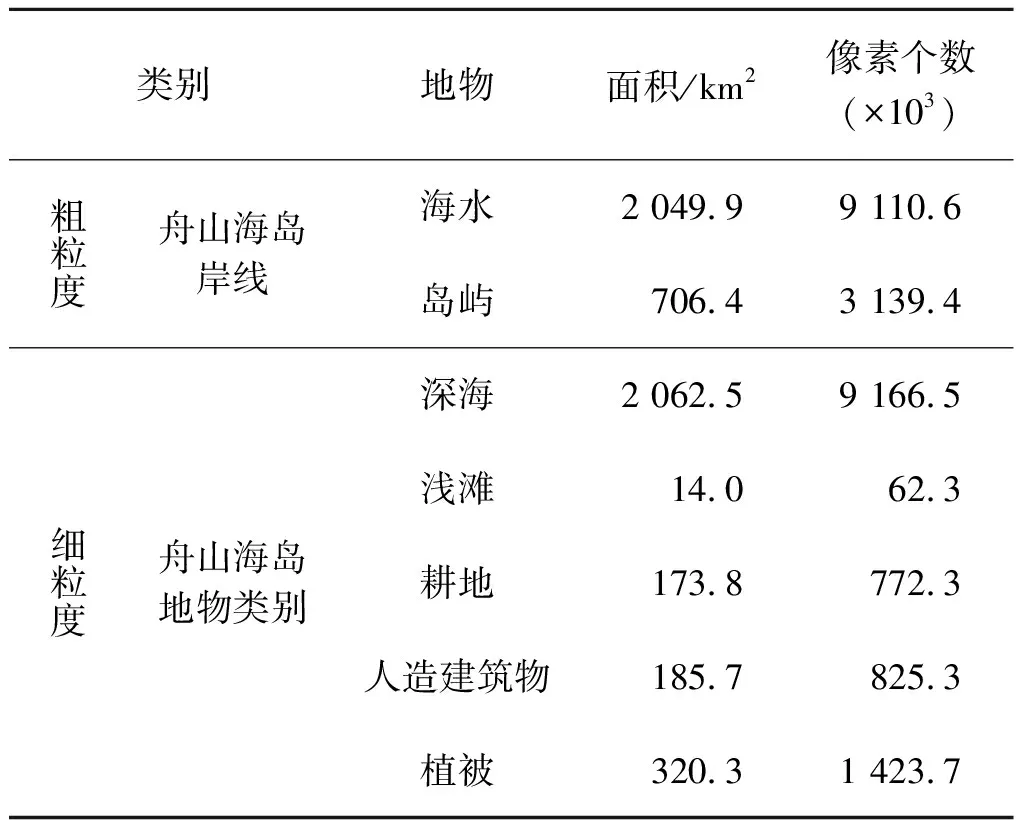
表1 基于目视解译的不同粒度海岛地物类别面积统计
2.2 基于不同分割算法的海岛地物类别提取结果的精度比较
本文设计了2个实验,通过对非线性优化Otsu分割算法与Otsu、2D-Otsu、K-means、FCM 4个分割算法对比,从分割精度和时间效率2个方面对非线性优化Otsu分割算法进行了可行性比较。基于原始遥感数据,验证非线性优化Otsu分割算法用于不同粒度海岛地物类别信息提取的精度优势。另外,基于遥感影像降维后数据,验证非线性优化Otsu算法用于不同粒度海岛地物类别信息提取的时间效率优势。实验环境为:Windows 10专业版,Intel(R) Core(TM) i5-6500 CPU @3.20 GHz,RAM 4.00 GB,MATLAB R2013a。
1)基于原始遥感影像的不同粒度海岛地物类别分割对比实验。
(1)基于不同分割算法的粗粒度海岛地物类别分割。将Landsat-8影像的各波段视为传统独立图像,采用非线性优化Otsu分割算法和Otsu,2D-Otsu,K-means,FCM分割算法对海岛地物类别进行了粗粒度分割,地物类别为海水和岛屿。图3所示为基于遥感影像的各波段,利用不同分割算法实现粗粒度下海岛地物类别的提取结果的空间分布图。
由图3可以看出:①不同波段的分割结果表现出较大的差异性;②非线性优化Otsu分割算法与Otsu、2D-Otsu在第1、2、3、4波段中的粗粒度海岛地物类别分割提取结果具有相似性;③非线性优化Otsu分割算法在第5、6、7波段中的粗粒度海岛地物类别分割提取结果具有相似性;④K-means算法在第2、3、4波段上较难实现粗粒度海岛地物类别的提取,在第1、7波段上提取的粗粒度海岛地物类别与其他方法相比,具有较大的差异性,在第5、6波段上较清晰地实现了粗粒度海岛地物类别提取;⑤FCM算法在第1、2、3、4波段上提取的粗粒度海岛地物类别效果较差,在第5、6、7波段上较清晰地实现了粗粒度海岛地物类别的提取。由结果可以看出,面向粗粒度的海岛地物类别,遥感影像各波段间不仅表现出了较大的信息冗余性,亦表现出较大的差异性。

图3 基于各波段影像的不同分割算法下粗粒度海岛地物类别空间分布图
(2)非线性优化Otsu分割算法在细粒度海岛地物类别提取中的应用。利用非线性优化Otsu分割算法对各波段进行逐步地细粒度海岛地物类别分割。图4所示为不同粒度下海岛地物类别空间分布图。其中,第1行表示将该海域分割为两类地物类别,即海水与岛屿;第2行表示将该海域分割为三类地物类别,即深海、浅滩与植被;第3行表示将该海域分割为四类地物类别,即深海、浅滩、植被与人工建造物;第4行表示将该海域分割为五类地物类别,即深海、浅滩、植被、人工建造物与耕地。
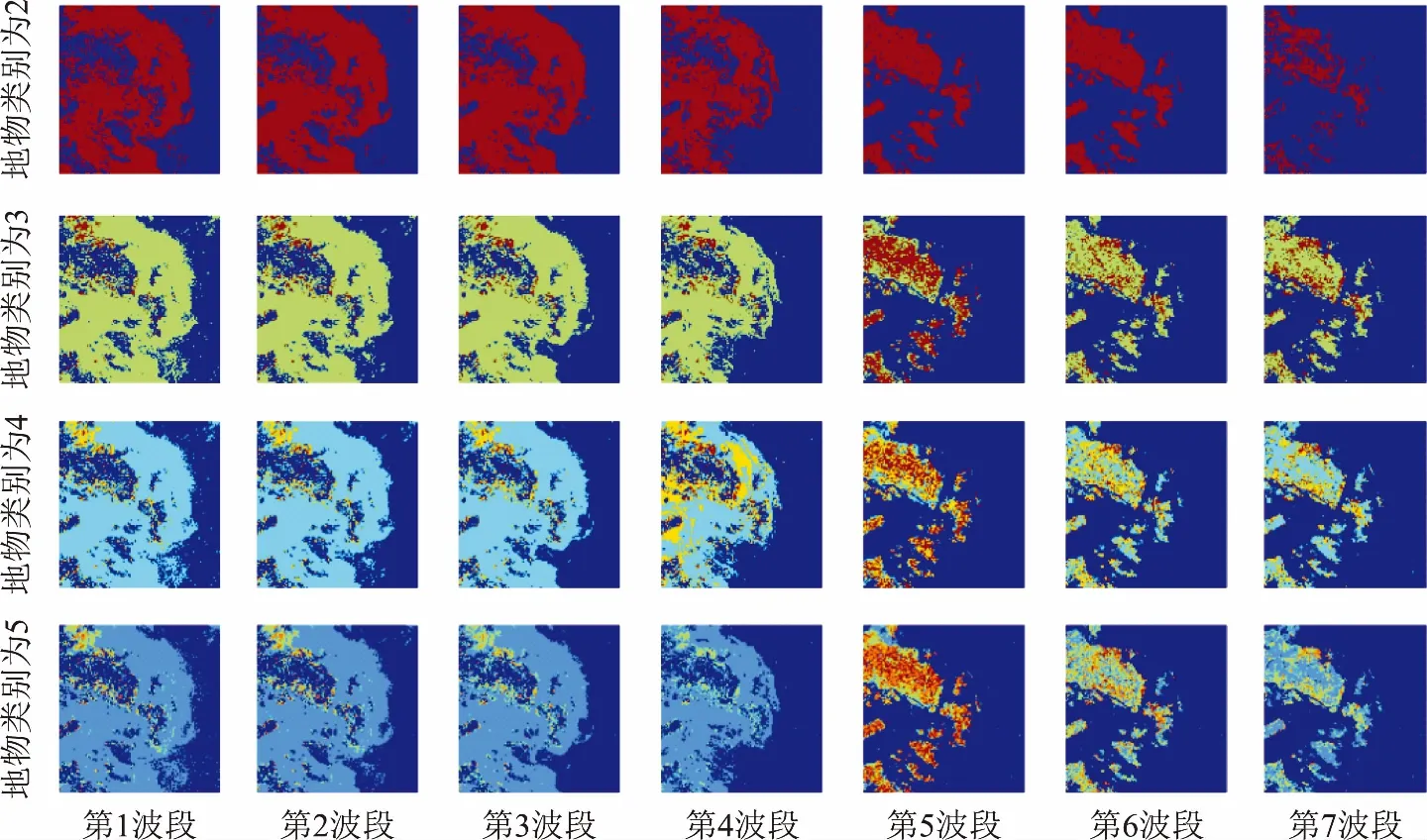
图4 基于改进Otsu算法各波段细粒度海岛地物类别空间分布图
由图4可以看出:①第1、2、3、4波段间存在较大的信息冗余,第5、6、7波段间存在较大的信息冗余;②基于第1、2、3、4波段的地物类别提取效果较差;③不同的波段对地物类别的提取具有不同的辨别力,如第5、6、7波段对海与岛屿具有较好的辨别力;④第5波段对植被、人造建筑物、深海、浅滩和耕地具有较好的辨别力。
2)面向降维影像的不同粒度海岛地物类别提取对比试验。利用PCA降维算法构建用于不同粒度海岛地物类别提取的新图像,采用非线性优化Otsu分割算法和Otsu、2D-Otsu、K-means、FCM算法对海岛地物类别分割结果进行比较。
(1)基于降维后新影像的粗粒度海岛地物类别提取对比试验。采用非线性优化Otsu分割算法和Otsu、2D-Otsu、k-means、FCM算法对海岛地物类别进行了粗粒度分割,地物类别为海水和岛屿。图5所示为基于降维后新影像的粗粒度海岛地物类别的空间分布;图6为不同分割方法的时间效率对比图;表2列出了粗粒度海岛地物面积数据。
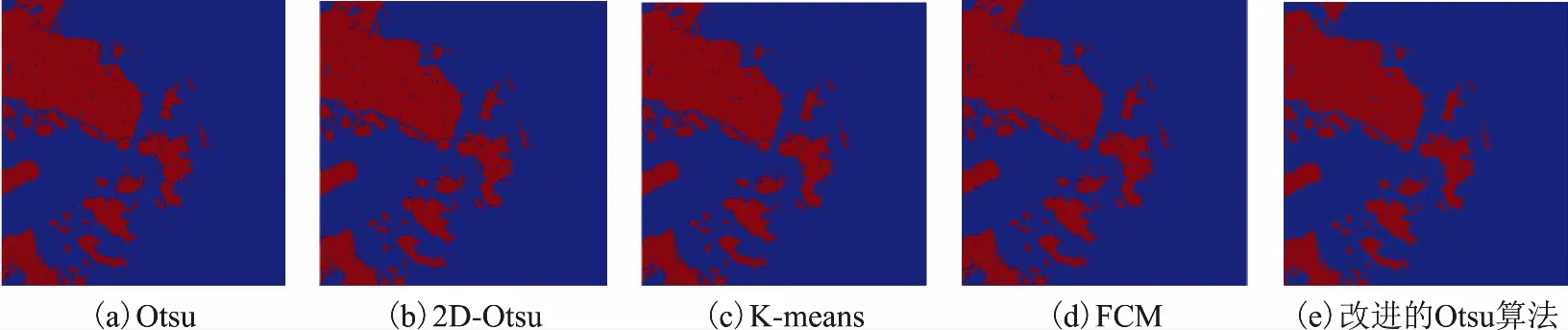
图5 基于降维后的新影像的粗粒度海岛地物类别空间分布图
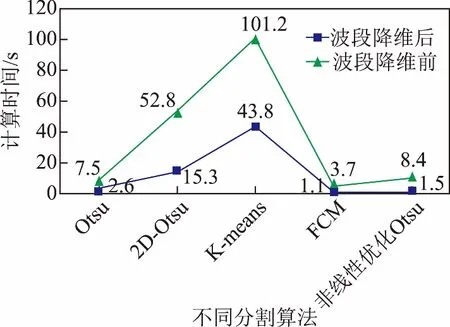
图6 基于图像降维前后不同分割算法的时间对比

表2 基于降维后新影像的粗粒度海岛地物面积对比像素
图5所示为基于降维后新影像的粗粒度海岛地物类别分割结果,由图5、图6和表2可以看出:①不同算法下,分割结果相似;②Otsu、2D-Otsu、FCM和K-means方法分割结果一致,非线性优化Otsu分割算法错分面积较大;③与图2(a)进行对比,其中Otsu、2D-Otsu、K-means和FCM算法将部分云错分为岛屿,而非线性优化Otsu分割算法结果受到云的影响较小,分割较为准确;④在图像降维后,FCM算法计算时间最短,非线性优化Otsu分割算法次之,K-means算法计算时间最长;⑤图像降维前后时间对比,非线性优化Otsu算法在波段降维后,时间效率提高了82.1%。由结果可以看出,基于降维后新影像的粗粒度海岛地物类别分割,非线性优化Otsu分割算法在分割精度与时间效率上优于其他算法,得到了较好的分割结果。
(2)基于降维后新影像的细粒度海岛地物类别提取对比试验。利用非线性优化Otsu分割算法对降维后新影像进行逐步地细粒度海岛地物类别分割提取。图7为基于降维后新影像的细粒度海岛地物类别分布图。图7所示为基于降维后新影像的细粒度海岛地物类别分割结果;图8为不同分割方法的时间效率对比图;表3列出了细粒度海岛地物类别面积数据。
图7所示为基于降维后新影像的细粒度海岛地物类别分割结果。由图7、图8和表3可以看出:
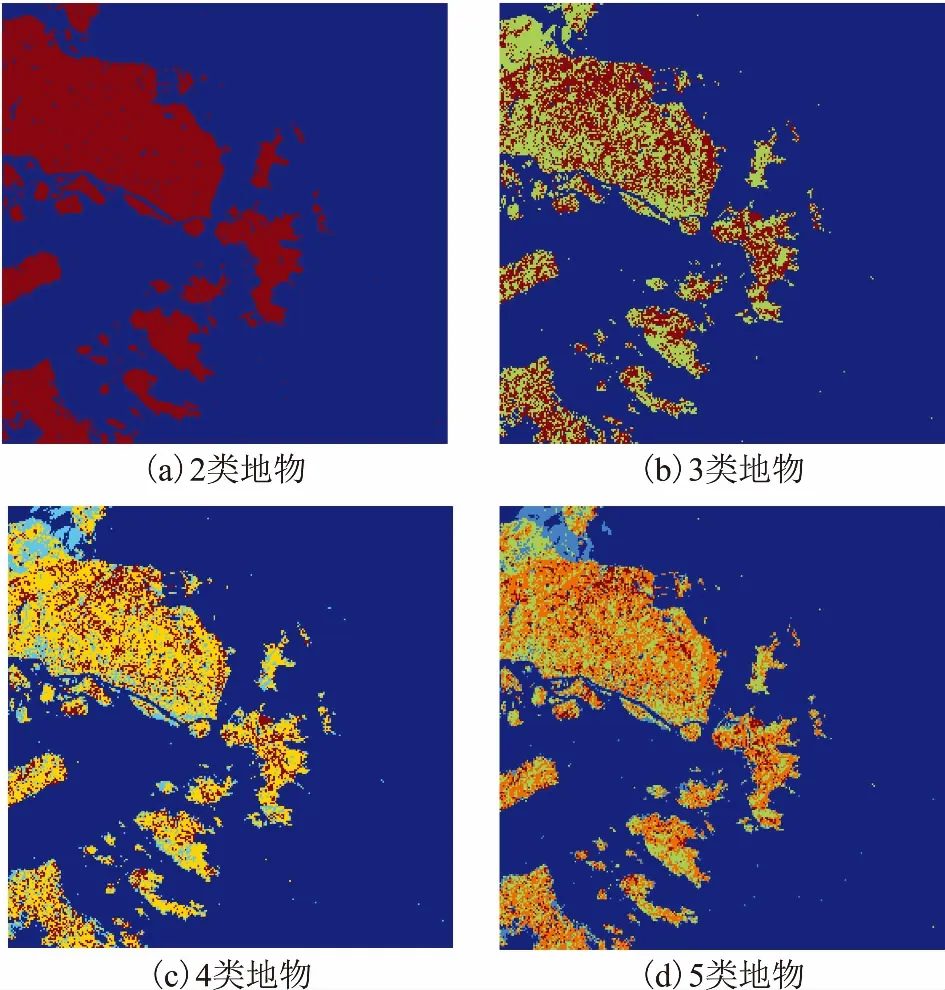
图7 基于降维后新影像的细粒度海岛地物类别分布图
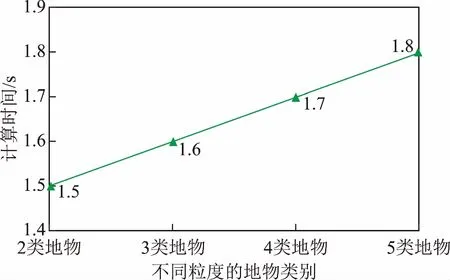
图8 基于降维后新影像的不同分割粒度时间对比

表3 基于降维后新影像的细粒度海岛地物类别面积比较像素
①图7(a)所示为海水与岛屿的分割结果,图7(b)所示为深海、浅滩与植被的分割结果,图7(c)所示为深海、浅滩、植被与人工建造物的分割结果,图7(d)所示为深海、浅滩、植被、人工建造物与耕地的分割结果;②随着分割地物类别的增加,计算时间不断增长,但是计算时间增长趋势较为缓慢;③改进的Otsu算法与目视解译结果具有类似的分割结果,总体分类精度达到82.6%,其中深海的分割精度最高为98%,浅滩的分割精度最低为39%,错分误差为3.68%。由结果可以看出,基于降维后新影像的细粒度海岛地物类别分割,非线性优化Otsu分割算法能够有效地分割不同地物。
3 结束语
遥感影像的多粒度分割,能够有效地得到丰富的遥感影像空间内容。本文改进了传统的Otsu算法,基于PCA算法对遥感影像进行降维,得到的新影像为改进的Otsu算法的数据输入,另外构建了非线性优化Otsu分割算法,同时利用总方差替代类间方差求解阈值,提高了图像分割的计算效率及精度。
结果表明,相比Otsu算法,本文提出的非线性优化Otsu分割算法时间效率提高了59.88%;总体分类精度达到82.6%。非线性优化Otsu分割算法兼顾了错分误差和计算时间,对于遥感影像的信息提取中具有较好的分割效果。
猜你喜欢
车主之友(2022年4期)2022-08-27
奥秘(2020年5期)2020-06-30
海峡姐妹(2019年12期)2020-01-14
小星星·阅读100分(低年级)(2019年8期)2019-09-16
民族古籍研究(2018年1期)2018-05-21
火控雷达技术(2016年1期)2016-02-06
新校长(2016年8期)2016-01-10
浙江大学学报(工学版)(2015年1期)2015-03-01
中国中医药现代远程教育(2014年16期)2014-03-01
