基于混合系统模型预测控制的列车优化运行
2019-03-20 13:07:26王攀琦汤旻安
铁道标准设计 2019年4期
王攀琦,汤旻安,2
(1.兰州交通大学自动化与电气工程学院,兰州 730070; 2.兰州理工大学机电工程学院,兰州 730050)
随着人工智能的发展,对高速铁路自动驾驶的研究也越来越广泛,干线铁路也开始自动驾驶的研究。列车自动驾驶系统(ATO)可以代替司机,被证明是有效提高运输系统的效率的方法[1]。而针对列车的建模大多是建立列车单质点模型,未充分考虑运行工况的变化影响,对列车动力学行为描述不够精确。对列车动力学特性的掌握,关系到列车运行的安全性,同时影响列车速度的调整和舒适性的提高,因此,建立准确的动力学模型,是提高列车各项性能的基础[2]。文献[3]利用模糊PID软切换控制算法来对模糊控制与PID之间进行切换,实现了ATO系统调速控制的平滑过渡。文献[4]将模糊推理系统与神经网络进行结合,用两级模糊神经网络对高速列车运行过程进行控制。以上皆是基于连续状态变量对列车进行建模,对列车进行建模的方法随着研究的深入也不断改进。文献[5]通过对列车车辆、列车编队、滚动阻力、轨道环境等方面的研究,提出了一种高速列车的非线性纵向动力学模型,并对列车自动运行的纵向控制器设计进行了研究。文献[6]提出了混合动力系统模型来描述高速列车的新特性,研究具有固定旅行时间的高速列车的最小能量驾驶策略。但是,以上文献未充分考虑列车运行过程中离散变量对列车运行状态的影响。因此,需要建立一种更有效的动力学模型来描述列车的运动过程。近年来,关于混合系统的研究逐渐热门起来。混合系统内部连续状态和离散状态相互作用相互耦合。列车运行过程本身是一种连续变量和离散变量相互作用影响的过程,基于混合系统进行建模将更有效地分析列车的运行状态。本文基于混合系统建立列车运行动力学方程,引入整数变量,建立基于混合系统的列车混合逻辑动态模型,采用模型预测控制来设计控制器。由于列车在运行过程中需要满足对控制量和输出量一定的约束条件,而必须采用二次规划来获得控制律的最优解。同时为了克服预测控制计算量大的特点,引入阶梯式控制策略,简化运算过程,降低控制器运算量,提高控制器精度。
1 混合系统列车动力学模型
在系统离散部分和连续部分联系比较紧密时,需要对系统的连续部分和离散部分进行动态的描述,混合系统的优势在于可以有效地描述这种复杂的系统。混合系统的建模方法在描述混合系统的行为特征方面的能力各不相同,不同的建模方法有各自的特点和便利之处,并有各自适合的混合系统的模型。分段仿射模型(PWA)能够比较方便的分析系统的稳定性;混合逻辑动态模型(MLD)能够很容易地建立并求解混合系统的优化控制、状态估计、系统的故障检测等。研究结果表明,混合系统的模型在一定的附加条件下都是等价的[7-8]。目前为止,对于混合系统的研究也逐渐广泛。文献[9]提出用一个混合模型预测控制(MPC)框架来设计ATO系统的控制器,用于在硬约束条件下实现速度控制,但是追踪精度还不尽理想。这里先建立分段仿射模型,便于转化为混合逻辑动态模型。
1.1 分段仿射模型
动车组一般有8节车厢。令第i节车厢的质量、速度、位移分别为mi,vi,xi,Fqi,Fzi,fri分别为第i节车厢受到的牵引力、制动力和运行阻力。一般来说,运行阻力又包括基本运行阻力和附加运行阻力。运行阻力可以表示为
(1)
由于运行阻力的非线性,随着列车速度的增加,运行阻力也跟随速度逐渐变化,因而需要对其进行线性化处理。运行阻力分段线性化函数表示为
fri=aj+bjvi,j=1,2,3
(2)
线性化处理后参数取值见表1。
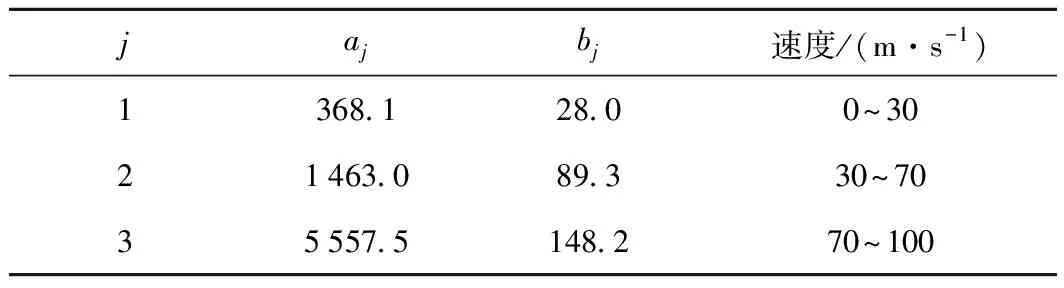
表1 列车运行阻力分段参数
选取其中任意一节车厢,例如第2节车厢,其运动学方程为
mivi(t)=Fqi-Fzi-fri(i=2,3,…,n-1)
(3)
通过分段线性化的方法处理之后,对非线性列车模型进行离散化,得到状态空间方程为[10]
(4)
仿真过程为了简化计算,取列车车厢数为3,则有

x=[v1,v2,…,vn]T为列车运行系统状态变量;u=[u1,u2,…,un]T为系统输入。定义δ为列车运行状态变量,δ=1表示牵引工况,δ=0表示制动工况。当δ取不同的值时,式(4)可表示为
(5)
其中,Bt,Bb分别为牵引力矩阵和制动力矩阵。
1.2 列车运行约束
列车运行过程中,需要满足一定的约束条件,包括线路、机车以及控制输入输出的限制。这里主要考虑的约束有:
(1)由线路条件限制的列车最大允许速度;
(2)车厢额定功率限制的最大牵引力、制动力;
(3)乘客乘坐舒适度,即对加速度变化量的控制,其最大变化率应控制在0.8 m/s3。
以上约束可用不等式表示为
(6)
1.3 混合逻辑动态模型
MLD模型具有一般性,混合系统的多个模型都可以转化为MLD模型。利用MLD模型可在一个集成的框架下方便地对混合系统进行分析和综合[11-12]。其主要思想是把命题逻辑变换成混合整数线性不等式,同时需要引人辅助变量[13]。这里建立混合逻辑动态模型所要解决的最优控制问题可以表述为:已知系统的初始状态、期望曲线寻求最优控制作用序列,使系统在该控制序列的作用下有效跟踪目标曲线,并使性能指标函数最小。
对(6)式展开得到
x(k+1)=[Ax(k)+Btu(k)+fAj]δ(k)+
[Ax(k)+Bbu(k)+fj][1-δ(k)]=
Ax(k)+Bbu(k)+(Bt-Bb)u(k)δ(k)+fj
(7)
引入连续辅助变量z,令z(k)=u(k)δ(k),可得
x(k+1)=Ax(k)+Bbu(k)+(Bt-Bb)z(k)+fj
(8)
转换得到的MLD方程为[14-15]
(9)
辅助变量及输入需要满足的约束为
(10)
2 性能指标
列车在实际运行过程中,需要考虑执行器饱和特性、列车安全限速和车间最大耦合力等约束条件,同时还需综合考虑运营准时性、节能高效和乘客乘坐舒适度等性能指标。性能指标函数的选取是保证控制器设计目标实现的保障,同时需要满足列车自动驾驶的条件,通过优化指标的实现,使系统在未来的输出满足系统跟踪要求[16]。
(1)准时性和定点停车
(x1(k+i|k)-xr(k+i))2}
(11)
vr,xr分别为参考曲线的速度和位移。
(2)乘客乘坐舒适度
(12)
(3)运行节能
(13)
综上所述,总的性能指标函数J将由上面3个部分组成,根据实际情况选择合适的权重,总的优化函数为
(14)
将其化简为向量形式有

(15)
M是优化变量的个数,也即控制增量的维数,P为预测时域的步长,即是对未来P个时刻进行预测。M越小,控制机动性越弱。Q为误差权重矩阵,R为控制权矩阵。控制权重矩阵R的作用是对Δu的变化加以适度的限制。它可以防止控制量过于剧烈的变化。
在预测控制中,为了使输出y(k)按一定响应速度平滑地过渡到设定值,参考轨迹通常取为下一阶滞后模型,有
(16)
式中,α∈[0,1)为输出柔化系数,当需要缓慢过渡时,可选择α接近于1。这样可以使w(k+j)平滑地过渡到设定值yr,同时也可使未来控制序列得到“柔化”[17]。
3 控制器设计
3.1 预测控制
预测控制只注重模型的功能,而不注重模型的结构,通常只实施当前时刻的控制作用。采用模型预测控制来设计列车控制器,其优势在于可以充分考虑系统输入及状态约束同时处理多目标优化问题等优点[18]。
模型预测控制一般包括预测模型、滚动优化、反馈校正3个部分。令γ为优化变量


未来输出预测表示为
假定系统是时不变的,由混合逻辑动态模型的一般形式可得x(k),y(k)相应的预测值
B2δ(k+j-1-i)+B3z(k+j-1-i)]
(17)
j-1-i)+B2δ(k+j-1-i)+
B3z(k+j-1-i)]
(18)
由式(8)可知,B2=0,所以有
X(k)=Fxx(k)+Gxγ
Y(k)=Fyx(k)+Gyγ
(19)
其中
(20)
Fy=CFx,Gy=CGx
(21)
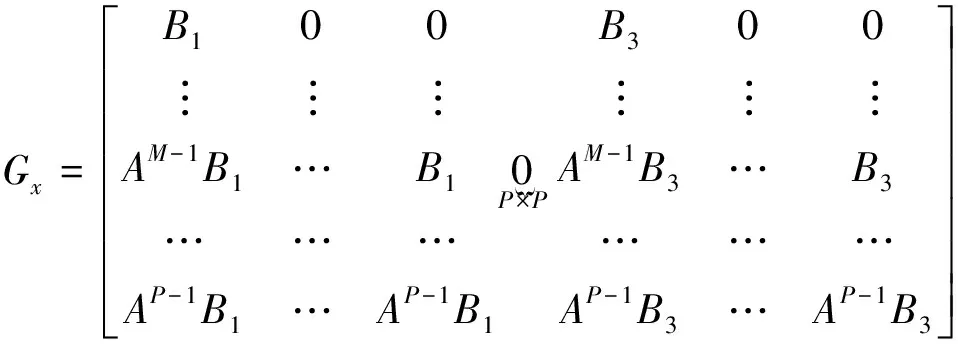
(22)
将预测输出量代入性能指标中,得到将最小化性能指标等价于函数最小化混合整数二次规划问题如下[19]
J=min{1/2γTHγ+f′γ}
s.t.Aeqγ≤beq
中国高铁国际化,为中国发展提供了更加广阔的地域空间。高铁作为连接世界的纽带,将不断把中国的产业、文化和思想传播出去,让全世界见到一个全新的中国,实现中华民族的伟大复兴。
(23)
其中
f=(Gy′Q′-(Fy-W))′
(24)
W为柔化后的参考轨迹曲线。由于逻辑变量及不等式约束的出现,上式没有解析解,需要将其转化为标准混合整数二次规划问题进行求解。
考虑约束条件式(5)、式(10),对其转化得到
(25)
式中,Ft,Fb分别为每节车厢的最大牵引力和最大制动力。
选取有效集法来解决二次规划问题,通过求解等式约束的可行解,并不断加以改进,直至获得最优解。主要步骤为:
(1)假设在第j次迭代中获得可行解γ(j);
(2)考虑改进可行解γ(j)+Δγ,代替γ;
(3)将有条件约束转化为无条件约束,即将其写成拉格朗日函数,从中获得优化解Δλ(j)和λ(j);
(4)判断是否获得了最优解。
3.2 阶梯式控制策略
列车控制系统要求快速响应的实时控制,计算量大,除了要求输出有效地跟踪期望值,控制增量Δu需要避免剧烈变化。这里在预测控制的基础上引入阶梯式控制策略,可以避免控制量频繁波动,使控制量尽可能朝着一个方向变化。具体方法为使控制量以成比例的形式显示,实现对预测控制算法的优化。
用增量形式来表示控制量,可以得到从k时刻开始的未来控制表示为
(26)
对于用增量形式表示的控制量,引入阶梯因子
(27)
其中,β即为阶梯因子。β的大小可对控制量变化快慢进行控制。因而有
(28)

(29)
基于模型预测控制算法步骤如下:
(1)根据预测模型和运行约束集合式形成优化问题;
(2)采样当前时刻k列车的速度和位置,获得系统初始状态x(k);
(3)选取合适的控制器参数和性能指标函数权重矩阵;
(4)求解混合整数二次规划问题,得到最优序列Δu(k);
(5)将最优解序列的第一项用于系统实现;
(6)在k=k+1时刻重复上述步骤,反复迭代,直到控制过程结束[20]。
4 仿真结果分析
高速铁路列车现多为动力分散型动车组,速度一般不超过350 km/h,本文选取CRH3型动车组参数如表2所示。控制器的参数如表3所示。速度控制器的功能实质上是保证被控列车能够准确及时地跟随列车运行过程中的目标曲线(该曲线在1 100 s和1 400 s进行制动减速)。这里让列车跟随一条时变的线段,如输出图形中红色曲线所示。
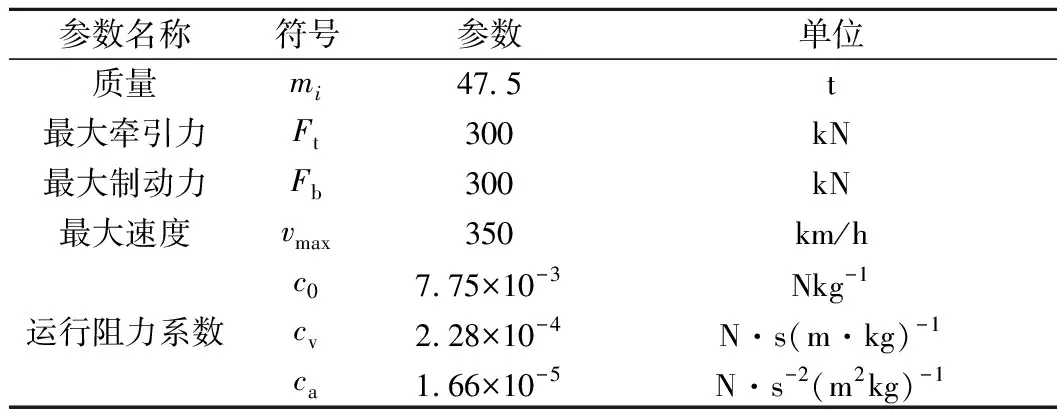
表2 CRH3列车参数
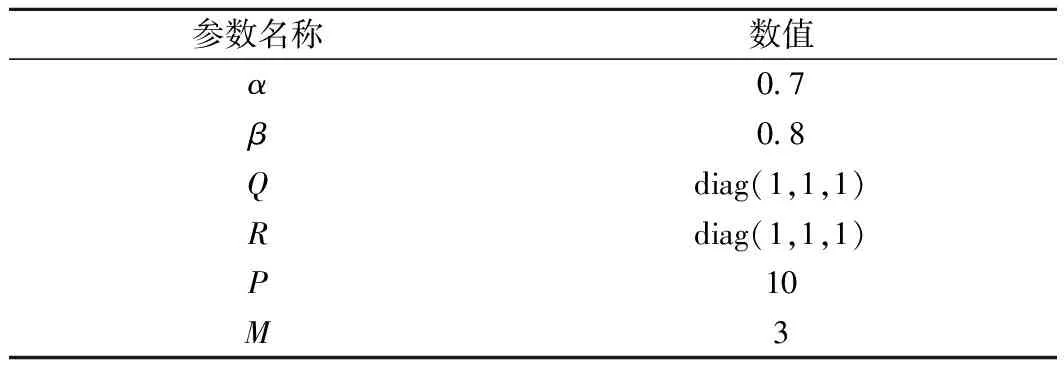
表3 控制器参数
case1选取表3中控制器参数进行Matlab仿真,结果如图1所示。
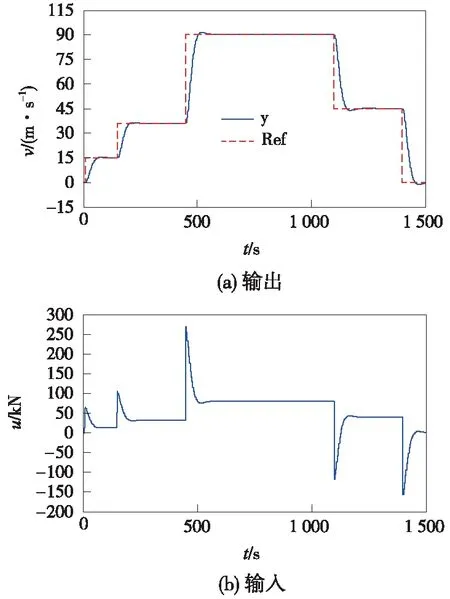
图1 case1仿真结果
在输出曲线图中,红色为参考曲线,蓝色为输出曲线。case1结果表明,当控制器权重及预测时域选择恰当时,不仅可以保证列车速度能够很好地跟踪上目标曲线,还可使输入在约束范围内。
case2选取表3中控制器参数,得到传统模型预测控制方法仿真结果如图2所示。
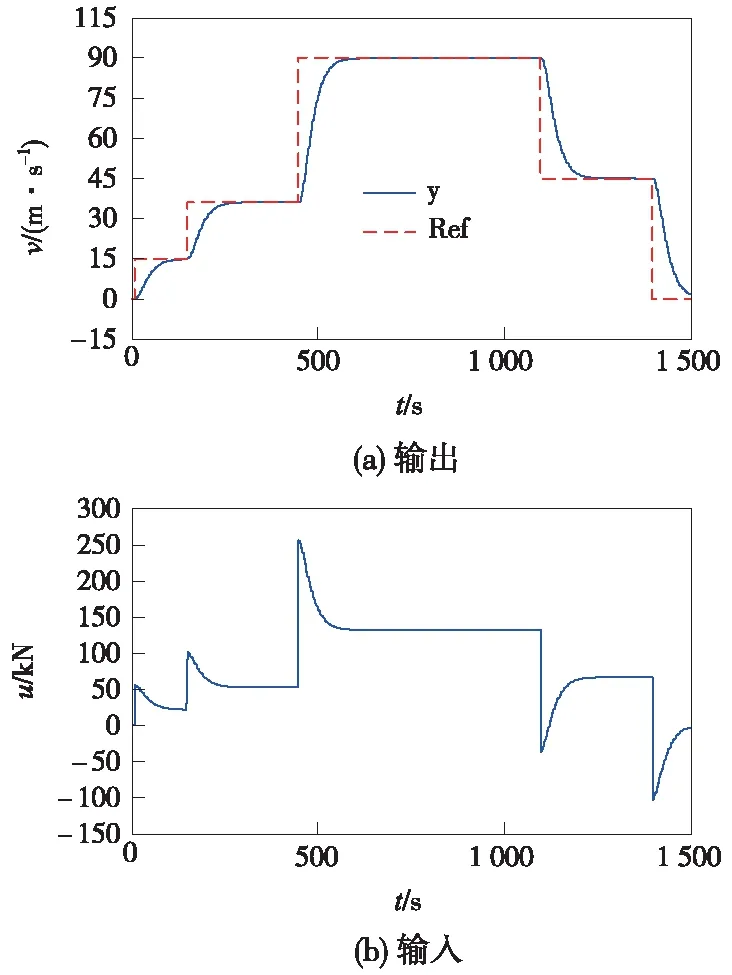
图2 case2仿真结果
case1与case2对比可得,两种控制器都能保证速度追踪的效果,引入阶梯式控制策略后的控制器相比较传统模型预测控制,响应速度更快,追踪精度较好。在实际运用中,应根据线路、环境等各项情况,应用合适的控制器。
case3在case1的基础上,减小预测时域,使P=6,仿真结果如图3所示。
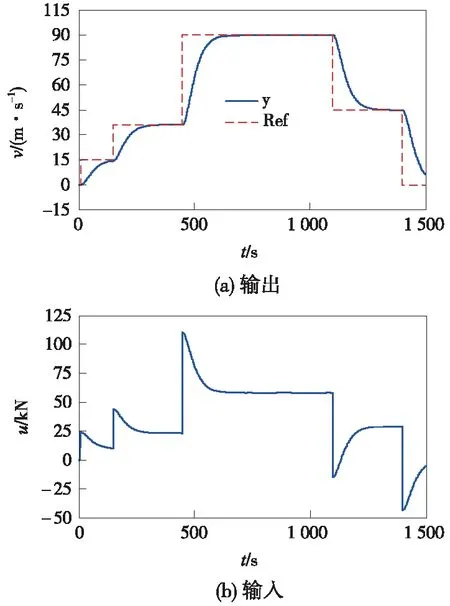
图3 case3仿真结果
case4在case3的基础上,保持控制时域不变,继续减小预测时域,使P=3,结果如图4所示。
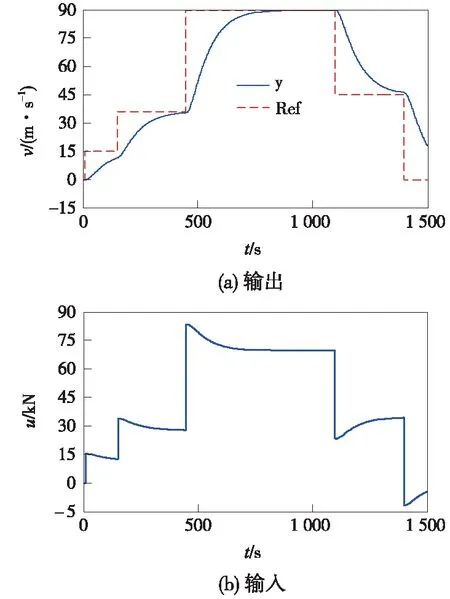
图4 case4仿真结果
case1、case3、case4对比可知,当逐渐减小预测时域时,系统的响应速度越来越慢,误差也越来越大。说明预测时域对于系统的稳定性与快速性有较大影响。因此,预测时域和控制时域需要进行考量后再进行选择,避免过大或者过小极端情况出现。
case5在case1的基础上,增大控制权重R′=2R,结果如图5所示。
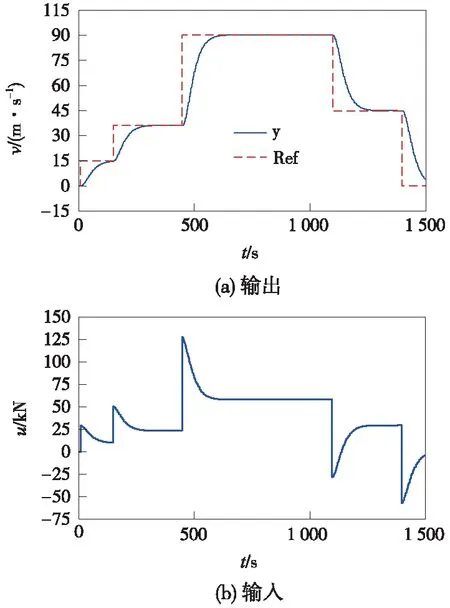
图5 case5仿真结果
case1、case5对比可知,当保持预测时域不变,增大控制权重为原来的2倍时,系统输入值变小,同时也导致系统响应慢,但波动较小,控制律的变化更为平缓。因此,应根据实际的需求来调节权重矩阵,来保证目标曲线跟踪的效果。
5 结语
针对列车自动驾驶系统,首先基于混合系统建立列车混合逻辑动态模型,其次基于传统的模型预测控制,采用基于阶梯式策略的预测控制。利用基于混合系统的混合逻辑动态模型,对列车建模可充分地考虑离散变量的影响。该控制算法通过二次规划逐步逼近方式求得最优控制律,能有效地满足约束条件。实施阶梯式策略的控制器,达到了减小计算负担的目的,在实际应用中有更强的适应能力。
猜你喜欢
石油沥青(2021年1期)2021-04-13 01:31:08
铁道通信信号(2020年1期)2020-09-21 08:55:16
测控技术(2018年11期)2018-12-07 05:49:02
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
制冷技术(2016年4期)2016-08-21 12:40:30
铁道通信信号(2016年8期)2016-06-01 12:10:21
测绘科学与工程(2016年4期)2016-04-17 06:51:14
西北工业大学学报(2015年4期)2016-01-19 03:31:55
中国铁道科学(2015年6期)2015-06-21 06:54:54
电测与仪表(2015年2期)2015-04-09 11:28:50