
城轨牵引变流器自主化设计与研制*
2019-03-18 11:32:42刘东辉
铁道机车车辆 2019年1期
刘东辉
(中国铁道科学研究院集团有限公司 机车车辆研究所, 北京 100081)
近年来,为缓解城市交通压力和促进节能减排,我国城市轨道交通发展迅速。目前已有40多个城市进行了城轨建设规划,其中30多个城市已有开通运营线路。在城轨交通的发展过程中,城轨车辆作为轨道交通装备领域中的重要组成部分起到了积极的支撑作用。而牵引系统作为城轨车辆的核心,直接影响到车辆运行性能,并关系到车辆的安全性、运行质量及能耗。文中结合科研院所基金支撑的城轨交通牵引系统自主化研制项目,对城轨牵引系统中的牵引变流器的自主化设计方法与研制情况进行介绍。
1 主电路设计及关键器件参数计算
根据北京某DC 750 V地铁车辆运营线路的技术要求,开展对车辆牵引变流器的设计。主电路采用电压型三相全桥结构,控制方式为架控模式,变流器的主电路主要包括:线路滤波电抗器、输入及预充电电路、中间支撑电容、功率模块、电压电流传感器、热管散热器、制动斩波器等。牵引变流器主电路设计方案如图1所示。
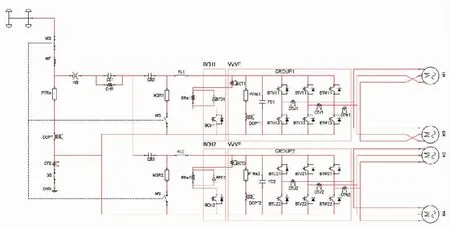
图1 牵引变流器主电路图
主电路关键器件IGBT选取参数的计算和散热器功率的计算如下。
1.1 逆变侧IGBT选取
按照牵引变流器及牵引电机的技术参数对功率器件IGBT的电压电流等级进行计算。
1.1.1电压等级
UCES=UDmax×1.5(安全系统)=
900×1.5=1 350 V
其中:额定电压750 V,电压波动范围500~900 V,取电压UDmax=900 V为电网波动输入的最大电压值。
1.1.2电流容量
式中:牵引变流器最大输出功率710 kVA;(考虑两台电机并联,1.5倍余量)。
纹波系数:输出电流最大值按1.05倍波动考虑;
Ic(max)为IGBT关断的最大电流。
通过上述计算,根据经验及机组的实际工况,可取电压为1 700 V,电流容量为1 600 A的IGBT半导体器件。
1.2 制动斩波侧IGBT选取
电压等级选取同逆变器部分,电流选取根据斩波工作的特点由式(1)确定:
(1)
其中:1.5为安全余量,计算所得为峰值电流。
可以选取与逆变侧相同容量的元件。
1.3 逆变器热管散热器参数计算与选取
牵引用IGBT损耗计算,按IGBT技术参数(T=150 ℃),开关频率选用1 kHz,取D=0.90,COSφ=0.85,结果如下:
1.3.1模块开关损耗
Psw=363 W
1.3.2IGBT通态损耗
VCE(sat)=2.4(正常值T=150 ℃(结温)),则:
PSS=1 050×2.4×(0.125+0.90×0.85/3/3.14)≈
520 (W)
1.3.3二极管的稳态损耗
取IEP=ICP,VCE=2.2(正常最大值T=25 ℃(结温))。
PD=1 050×2.2×(0.125-0.90×0.85/3/3.14)≈
101 (W)
1.3.4单管总损耗:
PT=PSW+PSS+PD≈984 (W)
根据经验,对热管散热器的基本参数要求见表1。
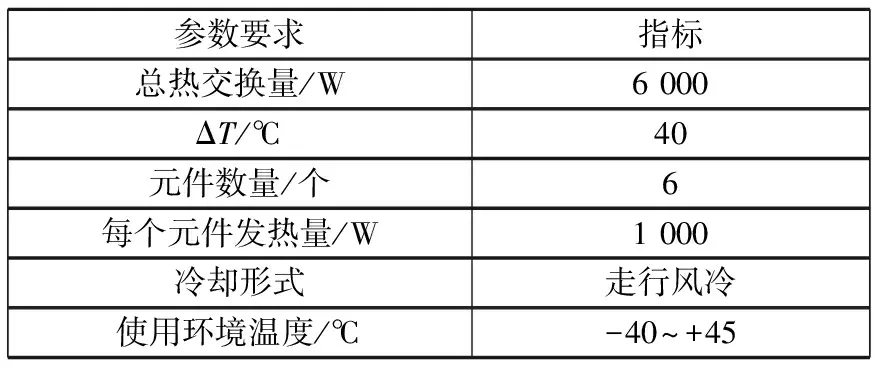
表1 逆变侧热管散热器基本要求
1.4 斩波装置热管散热器参数计算与选取
工作条件:开关频率500 Hz;占空比D=0.5;断续工作制在120 s中开通16 s。
1.4.1IGBT单管损耗
开关损耗:Ptsw=(Eon+Eoff)×f×D=
(0.5+0.6)×500×0.5=275 (W)
导通损耗:
Ptss=900/1.3×2.4×0.5×16/120=111 (W)
1.4.2二极管损耗
恢复损耗:Pdsw=Erec×f×D=
0.23×500×0.5=57.5 (W)
导通损耗:
Pdss=900/1.3×2.1×0.5×16/120=97 (W)
因为一个制动斩波装置的散热器上有两个单元的制动斩波相同,所以散热器需要散出的总热量为:
P=4×(Ptsw+Ptss+Pdsw+Pdss)=
4×(275+111+57.5+97)=2 162 (W)。
根据经验,对热管散热器的基本参数要求见表2。

表2 斩波侧热管散热器基本要求
2 控制单元硬件设计
牵引变流器的控制单元由控制板(CPU)、模拟量输入/输出板(AIO)、数字量输入/输出板(BIO)、电源板(POWER)、背板组成。控制器采用9u标准机箱结构,前面板为控制箱对外的连接线,背板为控制箱内连接线。
牵引变流器的控制单元实现对变流器的控制、监测和保护。牵引变流器的控制单元同时控制两个逆变器单元,因此采用了主从结构的两块控制板。控制系统硬件总体结构如图2所示
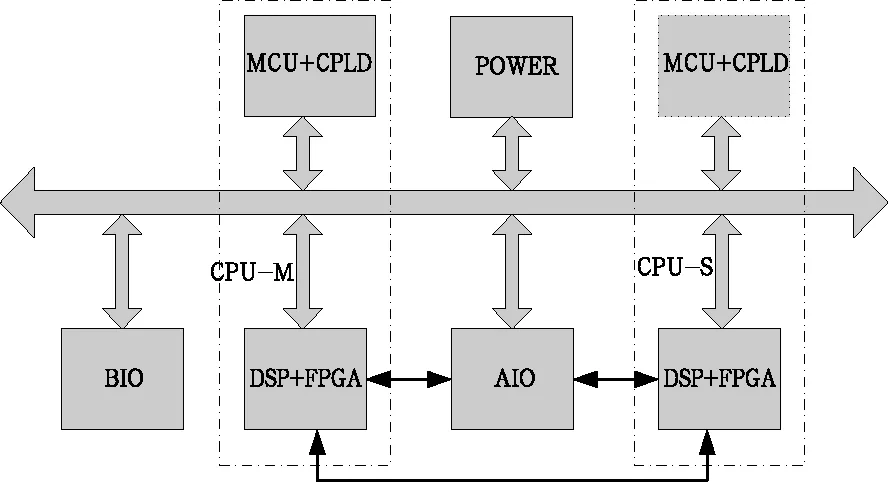
图2 总体结构图
2.1 控制板(CPU)
CPU板是控制单元的核心,它的控制功能由单片机、DSP、CPLD和FPGA为核心再配合相应的辅助电路构成的控制系统实现。板卡上还包括供电电源、输入输出接口、状态显示等。实现控制逻辑,故障检测、保护与故障信息的存储,完成与PC机和监控终端的通讯。控制板原理框图如图3所示。
2.2 模拟量输入/输出板(AIO)
AIO板卡承载着控制单元的模拟量处理功能,可划分为非隔离电压电流传感器的模拟量采样、硬件过流保护、模拟通道自测试、温度测量、转速测量、隔离放大器模拟量测量、AD转换、DA转换及输出和前后面板接口等部分。AIO板完成对来自外部传感器的模拟量如:电压、电流、温度及转速等的采集、滤波,转换为数字信号,并将处理好的数据送给CPU板,也接收来自CPU板的数字量并将其转换为模拟量输出。AIO板的原理框图如图4所示。
2.3 数字量输入/输出板(BIO)
BIO板承载着数字信号指令发送和接收的功能,可划分为数字量输入通道,数字量输出通道,输入输出选通电路,串口和前后面板接口等部分。BIO板通过光耦或继电器等完成不同电压等级的数字量的输入与输出,也包含和监控终端的通讯接口。BIO板原理框图如图5所示。
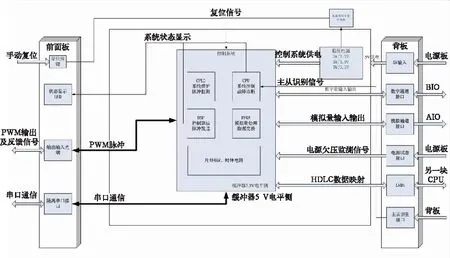
图3 控制板原理框图

图4 AIO板原理框图
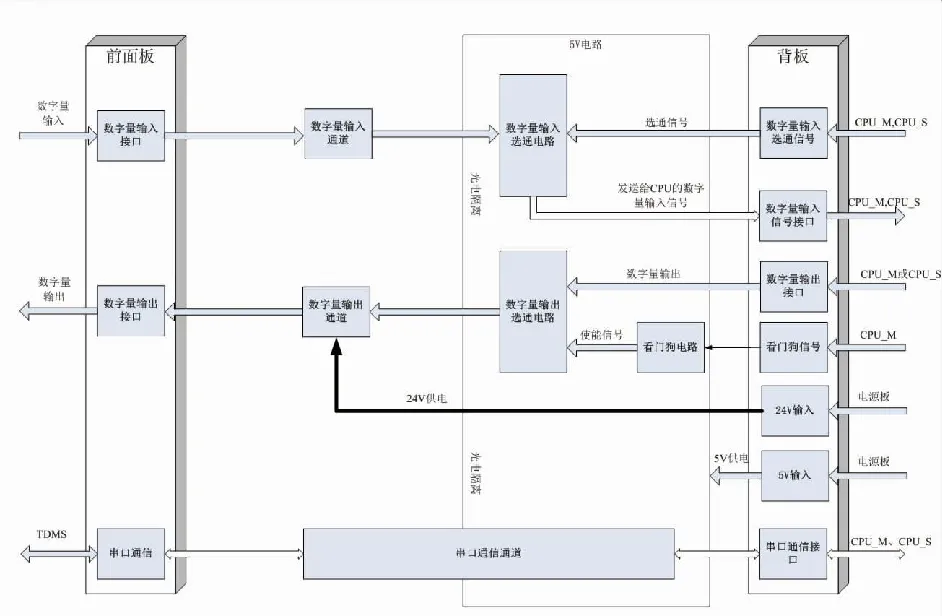
图5 BIO板原理框图
2.4 电源板卡(POWER)
POWER板卡是将外部输入的110 V电源变为5 V,±15 V,24 V等各种不同等级的电源供给控制单元的各板卡以及IGBT驱动板,具有电源质量监控和保护功能。为控制箱内各板卡供电,并对各路电源进行监控,将电源故障信号送到控制板。POWER板原理框图如图6所示。

图6 POWER板原理框图
3 控制系统软件设计
针对牵引控制单元硬件采用的MCU、DSP、FPGA和CPLD 4种可编程芯片相结合的结构,进行了控制软件的设计。通过这4种芯片软件之间互相配合共同完成控制单元所需功能。另外在调试城轨牵引、辅助变流器过程中,需要开发在PC机侧模拟与车上设备通讯的上层软件,实现与变流器的调试串口、故障监视串口的通讯功能。
针对上述软件开发的需求,搭建了控制单元软件开发平台,开发平台情况如图7所示。
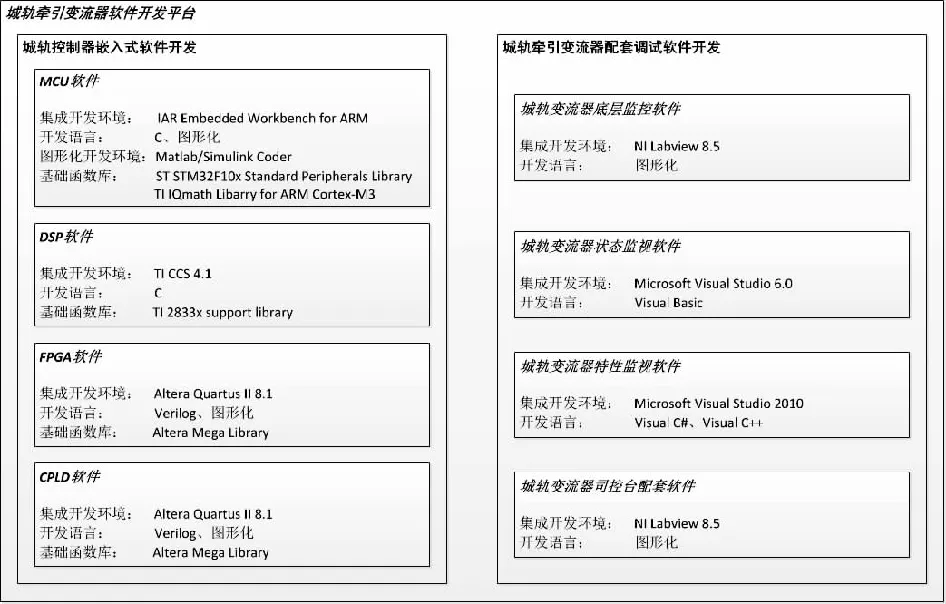
图7 控制系统软件开发平台
3.1 MCU软件主要功能
MCU软件开发的工作主要包括底层驱动软件和牵引变流器应用程序两大部分的内容。底层驱动软件主要完成应用程序与实际硬件的交互工作,通过底层驱动软件读取各个输入端口的工作状态,由应用程序根据这些状态,决定输出端口状态,并由底层驱动软件完成最终实际输出动作。应用程序则主要包含了牵引变流器的各个工作逻辑等,MCU软件的主要功能包括:
(1)输入输出接触器的开关控制和状态反馈读取;
(2)输入电机转速信号的读取;
(3)输入输出电压电流传感器值的读取;
(4)电机牵引特性曲线的生成;
(5)各个温度传感器和温度开关状态的读取;
(6)主从MCU热备份切换;
(7)牵引变流器的启动、停止等工作状态的控制;
(8)制动斩波器的启动、停止等工作状态的控制;
(9)制动电阻的温度计算;
(10)各种故障的检测、判断和保护;
(11)故障时刻数据存储;
(12)通过硬线,获取司控器的控制指令;
(13)通过RS232接口与PC机监控软件通信,获取PC机监控软件的控制指令,向PC监控软件报告牵引变流器的工作状态。
3.2 DSP软件主要功能
牵引变流器控制器中DSP及其辅助电路是核心控制算法的形成单元,DSP软件的主要功能包括:
(1)牵引变流器中电机闭环控制算法;
(2)变流器的输出控制脉冲产生;
(3)变流器模拟量的有效值计算。
3.3 FPGA软件主要功能
FPGA的主要功能是作为数据周转中心,实现CPU和DSP在双口RAM间的数据交换,FPGA软件的主要功能包括:
(1)数据交换功能;
(2)数据采集和输出功能;
(3)关键故障的判断和保护功能;
(4)制动斩波脉冲产生功能。
3.4 CPLD软件主要功能
CPLD的主要功能是对DSP发出的PWM脉冲信号进行监控,对变流器功率模块进行实时保护,同时CPLD还执行两块CPU板的主从模式的转换管理和系统数据总线管理等任务,CPLD软件的主要功能包括:
(1)电源状态监视功能;
(2)IGBT模块状态监视功能;
(3)看门狗功能。
4 试验验证
设计与研制的牵引变流器样机通过了型式试验,完成了牵引系统地面联调试验。其中,地面联调试验采用异步电机背靠背、交流能量互馈的技术方案,按照地面联调试验要求,通过陪试机组进行控制,为被试机组提供所需负载。
4.1 牵引工况试验
被试机组处于满级牵引,调节陪试机组速度,由速度5 km/h、10 km/h、15 km/h,每5 km/h一个间隔直至80 km/h,在每一速度点陪试与被试机组背靠背平衡后,测量每一个速度点的牵引电机输出转矩和变流器直流输入侧的电压、电流、转速和功率。
4.2 电制动工况试验
手柄置于电制动最大级位,调节陪试机组速度,由80 km/h、75 km/h、70 km/h,每5 km/h一个间隔直至0 km/h。在每一速度点陪试与被试机组背靠背平衡后,测量每一个速度点的牵引电机输出转矩和变流器直流输入侧的电压、电流、转速和功率。
4.3 特性曲线绘制
分别在额定载荷条件下,绘制出牵引工况和制动工况时的转矩特性曲线,部分曲线如图8和图9所示。
试验结果与仿真曲线基本一致,变流器性能达到了设计要求。

图8 额定载荷牵引工况转矩特性试验结果

图9 额定载荷电制工况转矩特性试验结果
5 结束语
结合北京某线路地铁车辆对牵引系统的要求,进行了城轨车辆牵引变流器的自主化设计与研制,研制的城轨车辆牵引变流器完成了型式试验和牵引系统地面联调试验,并通过了行业内专家的技术评审,性能满足设计要求。
猜你喜欢
汽车维修技师(2019年7期)2020-01-16 04:33:04
测控技术(2018年12期)2018-11-25 09:37:42
城市轨道交通(2018年5期)2018-07-06 07:40:10
城市轨道交通(2018年3期)2018-05-17 09:19:50
汽车维修技师(2018年11期)2018-05-11 02:38:32
城市轨道交通(2018年2期)2018-04-18 05:51:01
城市轨道交通(2018年1期)2018-03-13 06:29:17
中学生数理化·高一版(2017年1期)2017-04-25 13:22:35
电子制作(2016年21期)2016-05-17 03:53:12
电测与仪表(2015年11期)2015-04-09 11:46:30
