
城市轨道交通既有车辆段短库线全自动驾驶改造方案研究*
2019-03-15 12:36陈宁宁王开锋
城市轨道交通研究 2019年3期
陈宁宁 张 琦 王开锋 高 莺 贾 鹏
(1.中国铁道科学研究院研究生部,100081,北京;2.中国铁道科学研究院通信信号研究所,100081,北京;3. 国家铁路智能运输系统工程技术研究中心,100081,北京//第一作者,高级工程师,博士研究生)
全自动驾驶系统是未来城市轨道交通的发展趋势。全自动驾驶系统经历了探索、推广阶段,已经进入了成熟应用阶段[1]。全自动驾驶系统发展之初主要应用于低运量的线路,而现在逐渐成为大运量干线线路的值得信赖的解决方案。最近10年,有21.5%的新开大运量线路选择了UTO(无人值守下的列车自动运行)系统。根据国际公共交通联合会的预测,到2025年全球将会有2 300 km的城市轨道交通线路选择全自动驾驶系统。目前,法国巴黎和里昂、德国纽伦堡、巴西圣保罗、西班牙巴塞罗那等的地铁线路都应用了全自动无人驾驶系统。
城市轨道交通的GOA(自动化等级)分为5个等级,从GOA0到GOA4[2-3]。目前,国内主流的CBTC(基于通信的列车自动控制)系统属于GOA2级,是一种STO(半自动列车运行)系统 。CBTC系统通过ATO(列车自动运行)子系统已经具备了正线运行的自动化驾驶功能,但在车辆段和停车场仍然仅依靠驾驶员根据轨旁信号显示行车,车载信号系统仅提供固定限速防护功能。ATO模式下,运行安全完全依赖于人工,易发生因人员疏忽而造成的事故。因此,通过提高车辆段的自动化水平可以使既有线的CBTC系统达到GOA4级水平(UTO)。继2009年纽伦堡U 2线、2012年巴黎L 1线完成全自动改造后,格拉斯哥、伦敦、里昂、马赛、巴黎、维也纳等欧洲城市已确认将在未来10 a进行线路的自动化改造。
自动化车辆段的主要功能包括列车的自动唤醒、自动调车、自动出库、自动进入正线、自动退出正线、自动洗车、自动入库及自动休眠等[4]。其中列车的自动唤醒、自动出库、自动入库、自动休眠是在库内完成的。列车的自动唤醒及检车功能是自动化车辆段的核心功能。既有车辆段的库线长度较短且计轴区段划分不合理,不能满足列车自动唤醒后轨旁ATP(列车自动保护)的筛选、库内跳跃动态自检、自动入库3个功能对库线长度及布置的要求。可通过重新划分计轴区段实现列车的筛选,通过以下2种方案解决库线过短的问题。
(1)增加库线长度。此方案涉及既有库线及相邻建筑拆迁,存在费用较高、改造周期较长、对运营影响较大等方面的问题。地铁业主一般不选择库内自动化改造方案,而是采用以下方案:当全自动运行列车自动驾驶到库门口停车后,由人工驾驶列车进入库线;当全自动运行列车出库时,人工手动实现检车跳跃,并将列车驾驶到库口完成定位,然后再使列车进入全自动驾驶模式。
(2)减少车载信号系统的制动保护距离限制。库线的长度需要满足列车本身的长度及车载ATP系统对最小制动保护距离的要求。结合应答器、计轴、局部定位设备等信号系统轨旁设备的调整布置,通过变更入库控车流程及相关的安全制动模型减少车载ATP系统的制动保护距离限制,实现全自动运行列车短库线自动入库停车及唤醒后跳跃功能。此方案是车辆段自动化改造的较为经济可行的方案。
1 全自动车辆段库线设计方案及分析
1.1 全自动车辆段列检库线划分
图1为车辆段库线划分示意图。按照广州地铁大洲车辆段库线布置,既有非全自动线路的列检库线只有AG和BG两个计轴区段。6辆编组的列车长度为120 m,A和B两个列位所在计轴区段的长度通常分别为131 m和140 m。

图1 车辆段库线划分
为了满足全自动驾驶系统唤醒后轨旁ATP对非自动列车的筛选条件,需要将列检库线划分为AG、BG、CG ,总共3个计轴区段。但由于既有非全自动线路的库线长度普遍较短(268 m左右),不能满足理论上的299 m[5]的全自动车辆段库线长度需求。需要根据车辆参数及原有库线长度重新划分计轴区段长度。经过计算,设置AG、BG长度均为128 m,CG的长度为15 m,其中BG的保护距离(停车点到车挡安全点的距离)为7 m。
1.2 全自动车辆段列检库线布置
图2为车辆段库线信号设备布置示意图。在库线安装有固定应答器,用于VOBC(车载控制器)自动精确入库停车。在库线停车点附近安装有局部定位设备,局部定位设备的通信范围可以根据需要调整,能实现只与本列位已停准的车载设备双向通信。地面ATS(列车自动监控)可以在车载设备休眠后通过局部定位设备追踪休眠列车位置。车载定位设备也可以通过接收ATS的命令唤醒信号及车辆设备。唤醒后的VOBC通过局部定位设备确定列车定位,且只允许在局部定位设备通信范围内进行跳跃测试,以保证动态自检安全。

图2 车辆段库线信号设备布置示意图
1.3 自动化车辆段入库停车安全制动模型
标准安全制动模型[6-8]考虑了车载ATP的输出延迟tout、车辆的牵引切除延迟ttraciton、车辆的制动施加延迟tcoastiong。标准安全制动如图3中1#曲线所示,包含最大牵引阶段、惰行阶段和紧急制动阶段。由于BG的停车点距离车档的距离很短,且标准安全制动模型的曲线需要的保护区段为18 m,因此通过ATO不能实现列车自动入库停车。
对于变更后的安全制动模型,在入库阶段,车载ATP接收到局部定位设备信息后提前切除牵引,通过ATO控制列车在库线以惰行、制动工况行驶并精确停车。停车点处布置有局部定位设备,当ATP接收到局部定位设备信息且速度大于设置值时,ATP会施加紧急制动,以保证安全停车。采用这种控车方式,在ATP的安全制动模型中可以不考虑最大牵引阶段,只考虑惰行阶段和紧急制动阶段。
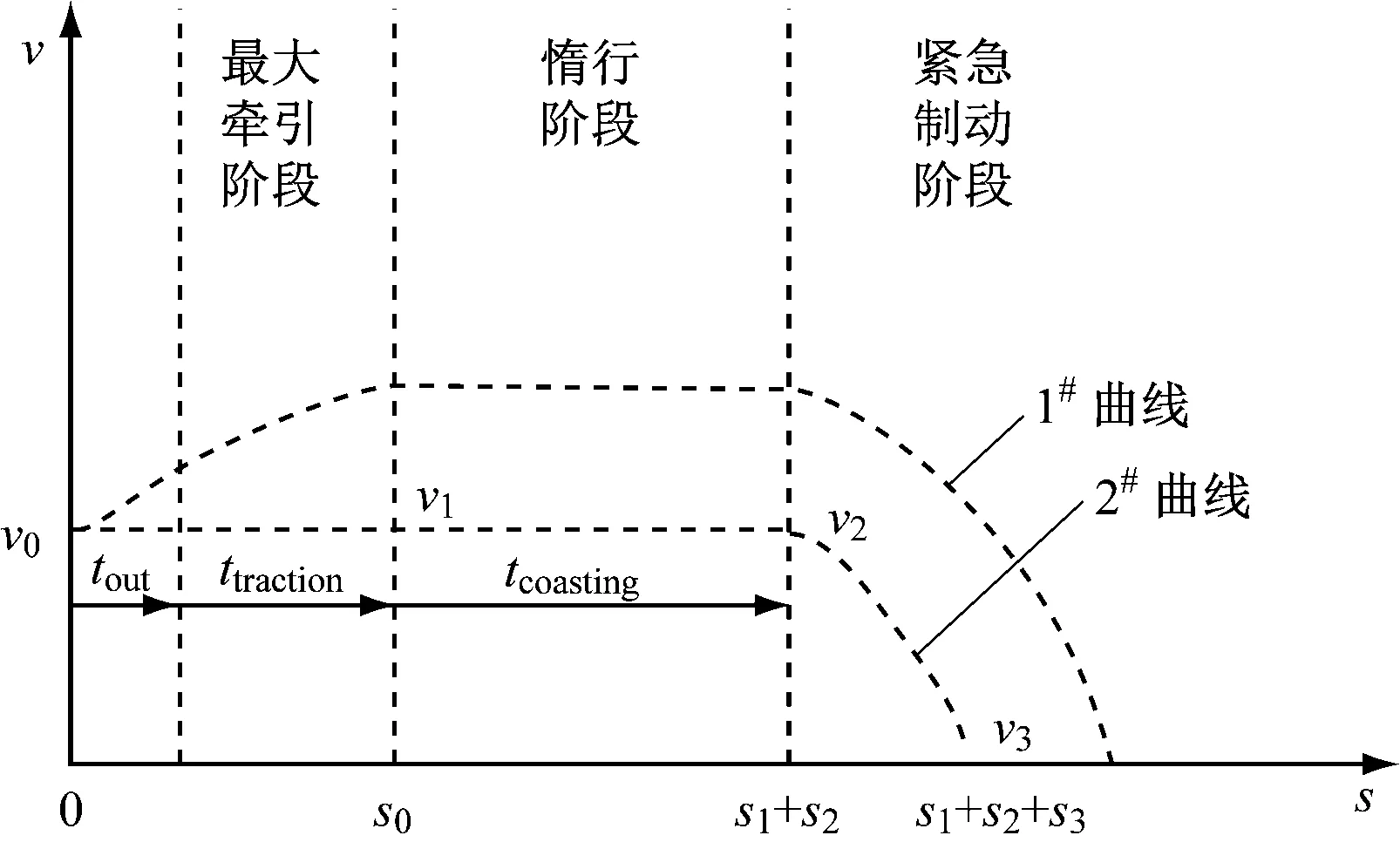
注:s代表距离;v代表速度
如图3所示,1#曲线为标准安全制动模型曲线,2#曲线为变更后的安全制动模型曲线。同样的初始速度v0下,按照2#曲线计算得到的紧急制动距离要小于按照1#曲线计算得到的紧急制动距离,等价于变更后的安全制动模型需要的保护距离小于标准安全制动模型需要的保护距离。1#曲线相关计算公式如式(1)所示。
(1)
式中:
s1——牵引阶段运行距离;
s2——惰行阶段运行距离;
s3——制动阶段运行距离;
m——质量;
η——最大下坡坡度:
Δh——紧急制动时,速度为v0时列车所在位置的海拔高度与速度为v3时列车所在位置的海拔高度之差;
f——阻力;
ao——牵引阶段加速度;
ac——惰行阶段加速度;
aeb——紧急制动阶段加速度;
ag,min——坡度造成的加速度;
g——重力加速度。
根据式(1)可以推导出式(2):
[v0+aoto-aeb(tc+to)]2-2gΔh}/(2aeb)
(2)
如不考虑牵引阶段的加速过程,可以根据式(2)推导出式(3):
aebtc)2-2gΔh]/(2aeb)
(3)
式(2)代表图3所示的1#曲线制动模型,其需要的制动保护距离长度为18 m。式(3) 代表图3所示的2#曲线制动模型,其需要的保护距离长度为3 m,该距离要小于BG停车点到车挡的距离(7 m)。因此,2#曲线制动模型是能够满足列车自动进站停车条件的。限速距离曲线如图4所示。表1为安全制动参数表。
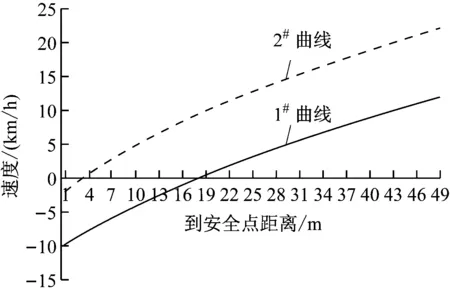
图4 限速距离曲线图
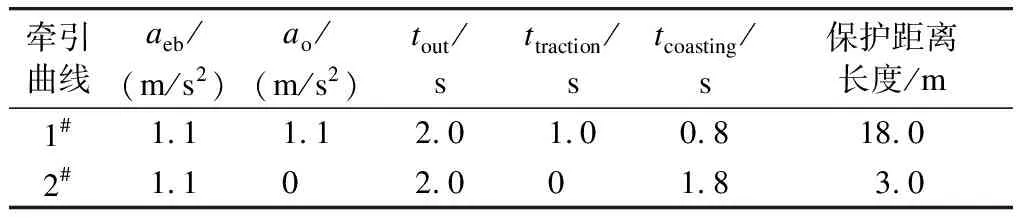
表1 安全制动参数表
1.4 自动化车辆段入库流程
以库线AG停车为例,在VOBC控制下,列车自动入库过程可以分解为以下2个主要过程(见图5):
(1)在列车从段场向库内运行过程中,VOBC根据应答器修正的位置判断距离局部定位设备HX 0104的距离。当判断未到局部定位设备HX 0104通信范围但已收到局部定位设备报文时,施加紧急制动停车;当判断越过局部定位设备HX 0104通信范围但还未收到局部定位设备报文时,施加紧急制动停车。目的是判断车载局部定位设备接收单元的健康接收状态,当存在不确定性因素时倒向安全侧。如果在允许范围内接收到局部定位设备报文,则切除列车牵引,允许列车以惰行或者制动模式继续向前运行。
(2)在惰行或制动运行过程中,VOBC根据应答器修正的位置判断距离局部定位设备HX 0103的距离。当判断未进入局部定位设备HX 0103通信范围但收到定位设备报文时,施加紧急制动停车;当判断进入局部定位设备HX 0103通信范围但还未收到局部定位设备报文时,施加紧急制动停车。如果在允许范围内接收到局部定位设备报文,则要判断速度是否超过限制速度;如果超过限制速度则施加紧急制动,如果速度非零但又接收不到定位设备报文则施加紧急制动停车。
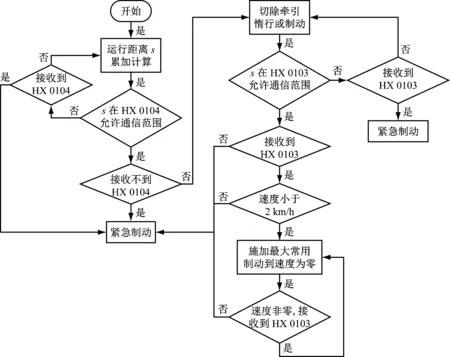
图5 列车入库流程控制图
2 仿真验证
图6为系统仿真测试环境示意图。如图6所示,在既有CBTC仿真测试环境(包含正线联锁、ATP、ATS等仿真软件)的基础上搭建全自动驾驶系统仿真测试环境[9],以及增加车辆段设备(联锁、ATP、ATS)接入和局部定位设备的仿真。
在仿真环境中初始化列车位置为转换轨,排列入段及入库的列车进路;手动驾驶列车接近信号机并转换为全自动驾驶模式;根据信号系统的控制命令及列车模型参数计算列车的当前速度;列车自动驾驶入库停车,停车过程中可以接收到轨旁仿真软件发送的应答器报文及局部定位设备报文。
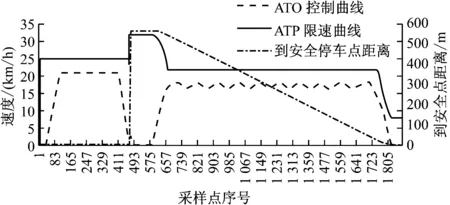
列车正常情况下自动入库运行曲线如图7所示。通过修改ATP的安全制动模型及变更信号设备布置方式,VOBC可以控制列车自动入段及入库停车。列车异常情况下自动入库运行曲线如图8所示,异常情况是指列车在入库过程中接收不到局部定位设备HX 0104信号而触发紧急制动。
通过测试验证,正常情况和异常情况下的列车自动入库流程能够保证列车不会碰撞车档(安全点),且正常情况下的列车自动入库流程能够实现精确对位停车。
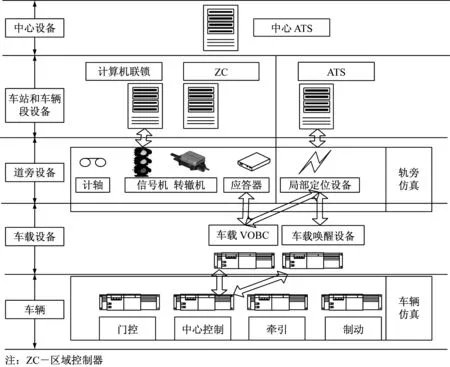
图6 系统仿真测试环境示意图
注:序号700—1 500为段内运行过程的采样;序号1 500—1 800为库内自动运行及自动停车的采样
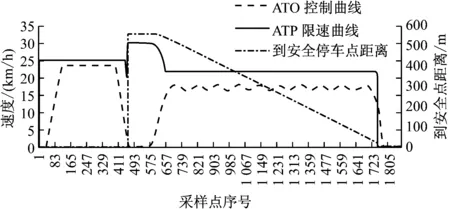
图8 列车异常情况下自动入库运行曲线
3 结语
本文提出的既有车辆段短库线全自动驾驶改造方案,立足于车辆段既有线土建规模不变,通过安全制动模型变更及列检库计轴区段合理划分实现短库线列车自动入库停车及唤醒后筛选。通过局部定位设备的额外防护增加列车自动入库停车过程中的安全距离判断,保证了短库线列车自动入库停车的安全性。通过搭建仿真测试环境测试验证了车辆段自动化的相关功能。
猜你喜欢
房地产导刊(2021年10期)2021-11-22
快乐语文(2021年15期)2021-06-15
中国食品(2021年4期)2021-03-22
中国食品(2021年2期)2021-02-24
童话世界(2020年13期)2020-06-15
铁道通信信号(2020年12期)2020-03-29
模具制造(2019年7期)2019-09-25
故事大王(2019年4期)2019-05-14
铁道通信信号(2018年7期)2018-08-29
铁道通信信号(2016年7期)2016-06-06
