基于免疫遗传算法优化的锅炉恒温水箱控制研究
2019-03-08 08:37:50高梅,叶丹
井冈山大学学报(自然科学版) 2019年1期
高 梅,叶 丹
基于免疫遗传算法优化的锅炉恒温水箱控制研究
*高梅,叶丹
(安徽文达信息工程学院机电工程学院,安徽,合肥 230012)
为了维持锅炉恒温水箱的温度,采用改进PID控制方法,并对控制方法进行仿真。给出锅炉恒温水箱的工作原理,建立锅炉温度传递函数。引用PID控制方程式,采用免疫遗传算法优化PID控制参数,实现PID控制器参数实时优化,通过仿真验证优化后锅炉恒温水箱温度输出误差。结果表明:采用传统PID控制方法,恒温水箱温度输出误差最大值为5℃,误差波动幅度较大;采用神经网络PID控制方法,恒温水箱温度输出误差最大值为3℃,误差波动幅度幅度较小;而采用改进PID控制方法,恒温水箱温度输出误差最大值为1℃,误差波动幅度最小。采用免疫遗传算法优化PID控制参数,能够提高锅炉恒温水箱温度控制精度。
免疫遗传算法;锅炉;恒温水箱;PID控制;优化
0 引言
锅炉主要利用可燃性燃料在锅炉中充分燃烧,并将储存在燃料中的化学能释放出来,从而产生具有较高热能的水、蒸汽以及其他的有机热源。按照用途的划分,一般将锅炉划分为蒸汽型锅炉、热风锅炉及热管型锅炉等[1];按照锅炉使用的燃料来分类,锅炉主要划分为燃煤型锅炉、燃油型锅炉以及生物质燃料锅炉等[2]。目前国内的锅炉均不带有锅炉余热循环利用或回收的装置,忽视或放弃锅炉余热的现象非常普遍。因此,如何充分维持锅炉温度并降低热能量损失是锅炉发展史上较为前沿性的新课题。
针对恒温箱温度控制方法,目前研究方法有多种,例如:文献[3-4]研究恒温水箱PID控制方法,给出了恒温水箱硬件系统设计方案,提高了控制系统输出精度,但是,外界受到波形干扰时,控制系统输出信号波动较大。文献[5-6]研究了恒温水箱温度控制方案,探讨了常见的温度控制方案,提出了综合节能控制的设计思路,但是没有具体给出优化方法,也没有对控制结果进行验证。文献[7]研究了恒温水箱神经网络PID控制方法,利用温度传感器采集温度数据,通过神经网络PID算法处理,从而调节温度变化范围,但是控制温度传感器采集数据误差较大,导致系统输出波动幅度较大。但这些控制的不稳定会导致温度变化较大。对此,本文采用免疫遗传算法对PID控制系统进行优化,从而有效地提高了锅炉恒温水箱温度控制精度。
1 恒温水箱工作原理
利用锅炉排放出的尾气穿过恒温水箱的锅炉尾气排管,将储存在恒温水箱的水加热加热到系统所设置的温度,然后通过控制系统将达到设定的温度的热水放置在保温储水箱进行储存,当温度未达到设定的温度时,系统会发出向恒温水箱添加冷水的指令,当恒温水箱的温度达到设定的温度后,继续将该热水放置在在保温储水箱进行储存。以此循环操作下去。恒温水箱作业是自动化智能化的,无需人工操作,如图1所示。
燃料燃烧散发出的能量分成两个部分:一部分被锅炉水箱吸收,使水温上升;一部分散发到空气中,造成浪费。根据能量守恒定律可得:
式中:为锅炉总能量;1为有用能量;2为无用能量。
由热力学定理[8]可知:
式中:C1为水的比热容;T1为锅炉内水的温度;k1为锅炉内散热系数。
对上式进行拉氏变换[8]后可得:

因此,可以得到锅炉内温度传递函数为:

1.锅炉燃料进料口;2.锅炉燃烧室;3.恒温水箱;4.锅炉尾气出口管道
2 恒温水箱控制系统
2.1 传统PID控制器
PID控制系统主要包括PID控制器和控制对象两个部分。PID控制器由比例、积分和微分三个环节构成,如图2所示。()为输入量,y()为输出量,()为反馈误差,PID通过比例、积分和微分的线性组合方式来控制对象。
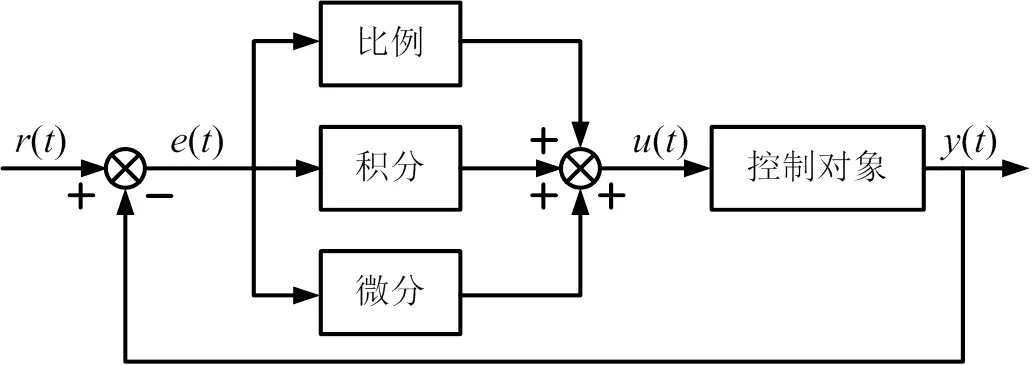
图2 PID控制流程
当前,PID控制方法主要采用增量式,其控制方程式[9-10]为:

式中:为采样序号;()为系统输出;k为比例系数;T为积分时间常数;T为微分时间常数。
2.2 PID控制器优化
为了避免遗传算法出现早熟现象,改进方法有多种。在对遗传算法进行分析时发现,遗传算法包括交叉和变异两个算子。交叉和变异通常是指定概率条件下进行盲目的搜索,遗传算子在进化过程会出现退化现象。为了改变遗传算法早熟现象,采用免疫算法结合遗传算法,组成免疫遗传算法。采用免疫算法抗体多样性,维持遗传算法的多样性,避免搜索过程中出现早熟现象,从而提高全局搜索效率。采用免疫遗传算法优化步骤如下:
1)参数编码
采用免疫遗传算法优化PID控制参数,要将PID控制参数转换为二进制数字形式,将k、T和T编码为免疫遗传算法抗体。
2)计算适应度函数
PID控制参数优化关键问题是适应度函数的选取,通常采用绝对误差积分作为评价指标,适应度函数[11-12]为:

3)更新记忆细胞
抗体细胞适应度高通过记忆功能保留下来,分配到PID控制器参数中。计算个体适应度函数值,确定种群最优适应度值,若搜索的最优适应度值小于免疫网络中最优适应度值,则免疫记忆开始重新搜索最优值,并作为最优的免疫抗体。否则,将已经计算的最优适应度值加入抗体记忆列表中。
4)维持多样性
采用选择机率调整种群的多样性,其计算公式为:
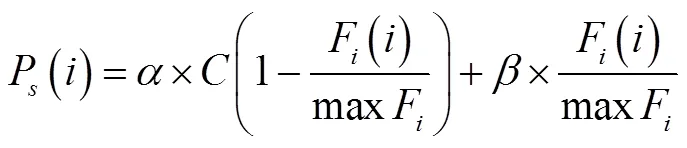
式中:、为区间[0,1]中的随机数;F()为个体适应度值;为抗体的浓度。
5)交叉操作
种群个体采用两点交叉方式进行操作,其交叉方程式[12]为:

式中:X'、Y'为交叉的新个体;为区间[0,1]随机数。
6)变异操作
采用高斯变异对PID控制器参数进行操作,其变异方程式[12]为:

式中:λ为区间[0,1]随机数;我高斯算子。
7)算法终止
比较相邻两次适应度函数值,若误差满足条件或者达到最大迭代次数,则算法终止。否则转到步骤2)。
采用改进PID控制器调节锅炉温度输出流程如图3所示。

图3 锅炉温度优化控制流程
3 误差仿真及分析
为了验证免疫遗传算法优化PID控制器的效果,采用MATLAB软件对改进PID控制器进行仿真验证。仿真参数设置为:样本个数为100,最大迭代次数为500,交叉概率为0.05,变异概率为0.8,恒温箱温度设置为70℃,k=1.425,T=0.753,T=0.587,仿真时间为8 s。采用PID控制恒温箱温度,产生的误差仿真结果如图3所示;而采用改进PID控制恒温箱温度,产生的误差仿真结果如图4所示。
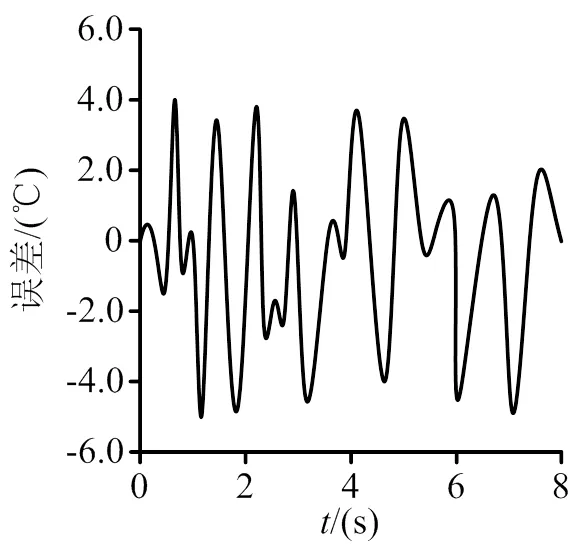
图4 PID控制误差
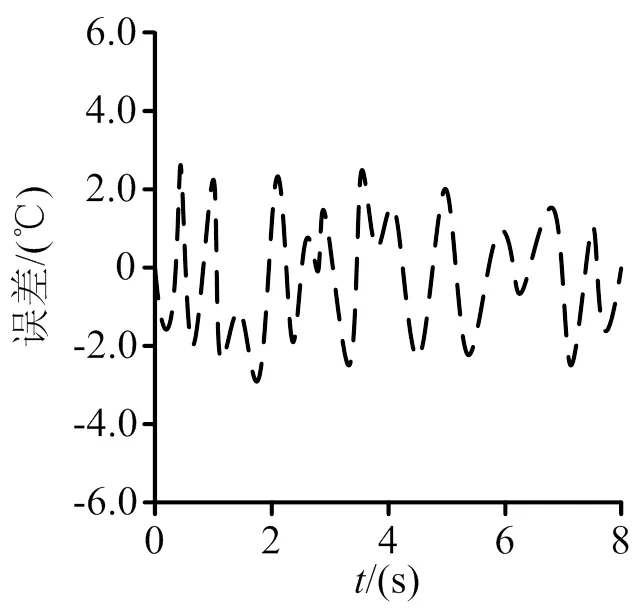
图5 神经网络PID控制误差

图6 改进PID控制误差
从图4可知,传统PID控制器,恒温箱产生的误差在5℃以内,误差波动幅度较大;由图5可知,神经网络PID控制误差在3℃以内,误差波动幅度幅度较小;由图6可知,而改进PID控制器,恒温箱产生的误差在1℃以内,误差波动幅度最小。影响恒温水箱控制系统的因素是冷水水力输送泵补充冷水的速度和热水收集的速度,冷水补充过程中形成热交换,使热水的温度降低,而增大热水收集的速度可以避免这种问题的产生。但是,传统PID控制器和神经网络PID控制系统反应速度慢,系统输出不稳定。因此,采用免疫遗传算法优化PID控制器,可以维持恒温箱温度,保持系统的稳定输出。
4 结语
本文的恒温水箱控制系统先确定任务指标,即维持恒温水箱的温度,先从该控制系统的用途和硬件结构入手,再从控制系统的控制结构及流程来分析,同时分别对恒温水箱改进控制系统和传统的控制进行试验和分析,得出改进后的恒温水箱控制系统优于传统的控制方法,通过分析和实验找出影响恒温水箱控制系统的因素,即冷水水力输送泵补充冷水的速度和热水收集的速度,冷水补充过程中形成热交换,使热水的温度降低,而增大热水收集的速度可以避免这种问题的产生。
[1] 孙桓宇. 预测控制在锅炉温度控制系统中应用研究[D].长春:长春理工大学,2013.
[2] 吕荣胜,王平. 基于节能减排的城市锅炉分布差异性研究[J].价值工程,2015(32):42-46.
[3] 李国林,朱林涛.恒温水箱控制系统参数整定算法的研究[J].电子工业专用设备,2016(4):51-55.
[4] Begum A Y, Gireesh N, Rao V, et al.Tuning and performance evaluation of PID controller for superheater steam temperature control of 200 MW boiler using gain phase assignment algorithm[J].AIP Conference Proceedings,2018,1952(1):10-15.
[5] 赵倩,林建泉,黄忠,等. 制冷试验室恒温水箱的温度控制方案研究[J].发电与空调,2015(4):72-76.
[6] Wang Y H, Liew J Y R, Lee S C. A novel multi-functional water façade system for energy saving and blast resisting[J].Materials and Design,2016,106(10): 98-110.
[7] 吕值敏. 基于AVR单片机控制的恒温水箱温度控制系统设计的研究[J].山东工业技术,2017(7):235-235.
[8] 余昌源. 电加热锅炉温度控制系统的设计及实现[D].呼和浩特:内蒙古大学,2014.
[9] 汪宏海. 基于免疫遗传算法的道路交通标志图像分割[J].井冈山大学学报:自然科学版,2018,39(1):60 -63.
[10] 曹平军,曲林伟,王强,等. 某驱动步进电动机增量 PID 控制研究[J].舰船电子工程,2017,37(8):162-163.
[11] 徐奔腾. 基于ARM的余热锅炉控制系统设计与开发[D].合肥:合肥工业大学,2016.
[12] 李育贤. 基于免疫遗传算法的 PID 控制器参数优化研究[J].计算机仿真,2011,28(8):215-218.
Control of boiler constant temperature water tank based on immune genetic algorithm optimization
*GAO Mei, YE Dan
(School of mechanical and electrical engineering, Anhuiwenda School of Information Engineering, Hefei,Anhui 230012, China)
In order to maintain the temperature of the boiler constant temperature water tank, the improved PID control method is adopted and the control method is simulated. The working principle of the boiler constant temperature water tank is given and the temperature transfer function of the boiler is established. Using the PID control equation and immune genetic algorithm to optimize the parameters of the PID controller, the real-time optimization of the parameters of the PID controller is realized. The temperature output error of the optimized boiler constant temperature water tank is verified by simulation. The results show that the maximum error of constant temperature water tank temperature output is 5℃ and the error fluctuation range is larger by using traditional PID control method; the maximum error of constant temperature water tank temperature output is 3℃by using neural network PID control method, and the error fluctuation range is smaller; and the maximum error of constant temperature water tank temperature output is 1℃by using improved PID control method, and the error fluctuation range is the smallest. Using immune genetic algorithm to optimize PID control parameters can improve the temperature control accuracy of boiler constant temperature water tank.
immune genetic algorithm; boiler; constant temperature water tank; pid control; optimization
1674-8085(2019)01-0075-04
TB65
A
10.3969/j.issn.1674-8085.2019.01.016
2018-09-29;
2018-08-19
2016年安徽省教学研究重点项目(2016jyxm0460);2017年安徽省高校科学研究重点项目(KJ2017A650);2017年安徽文达信息工程学院校级重点项目(XZR2017A03);2018年安徽省高校科学研究重点项目(KJ2018A0614)
*高 梅(1983-),女,安徽阜南人,讲师,硕士,主要从事控制工程、电气工程等方面的研究(E-mail:gaom1983@126.com);
叶 丹(1982-),女,安徽庐江人,讲师,硕士,主要从事控制理论与控制工程等方面的研究(E-mail:yedan@163.com).
猜你喜欢
自动化与仪表(2023年12期)2024-01-05 08:03:58
中外文摘(2021年10期)2021-11-12 04:59:17
河北农机(2020年10期)2020-12-14 03:13:42
河北省科学院学报(2020年4期)2020-03-19 02:02:40
大陆桥视野·下(2017年11期)2017-10-31 11:02:24
科技创新导报(2016年36期)2017-04-20 13:21:36
电子制作(2017年24期)2017-02-02 07:14:16
电子制作(2017年19期)2017-02-02 07:08:50
工业设计(2016年11期)2016-04-16 02:49:22
小雪花·成长指南(2015年10期)2015-10-23 08:37:37