优秀男子撑杆跳高运动员陈阳最后两步助跑至起跳技术的运动学分析
2019-03-08 02:47:10张锐,于芳,夏炎,付奕,唐丽
体育研究与教育 2019年1期
张 锐,于 芳,夏 炎,付 奕,唐 丽
在2017年中华人民共和国第13届运动会(下简称“第13届全动会”上)青少年组男子撑杆跳高决赛中,小将陈阳以5.0m的成绩夺得冠军,但在冲击5.16米的全国青少年纪录时未能成功,与世界记录仍有很大差距。Para Maud认为撑杆跳高是四大跳跃项目之一,撑杆跳高分为持杆助跑、插杆起跳、悬垂、摆体、伸展和过杆落地阶段[1]。从助跑开始到越过横杆落地的过程中,运动员需要借助助跑的动能经过插穴起跳然后转化为撑竿的弹性势能,在空中做出一系列复杂的技术动作最后越过横杆落地[2]。目前,有关撑竿跳高动作技术的运动学分析主要集中在成年选手,涉及青少年运动员的研究尚未检索到。撑杆跳高在我国基层的普及程度很低。很多运动员都是从田径的其它项目转行而来。2004年全国在国家体育总局田径运动管理中心注册的男子撑杆跳高运动员仅有49名,其中16—17岁年龄段仅14人。17岁的陈阳代表了我国青少年男子撑杆跳高的最好水平,但在技术方面仍存在欠缺之处。张伟是我国优秀的成年男子撑杆跳高运动员,曾获2014年全国田径世锦赛冠军、2015年亚洲男子田径世锦赛冠军等荣誉。通过陈阳与张伟的技术动作对比可以更加明显地找出陈阳存在的技术问题。本研究采用美国APAS三维运动解析系统对青少年撑杆跳高运动员陈阳最后两步至起跳动作技术的录像进行解析,探讨其在最后两步助跑至起跳阶段步长、速度、起跳时间及各关节角度等方面的动作技术特点,并与国内高水平成年男子撑杆跳高运动员进行对比分析,针对存在问题提出合理性建议,为陈阳备战2019年山西省太原市第2届全国青年运动会优异成绩的获得提供理论支撑。
1 研究对象
以我国优秀青少年男子撑杆跳高运动员、2017年第13届全运会青少年组男子撑杆跳冠军、山西省田径队成员陈阳为研究对象(见表1),对其最后两步助跑至起跳技术进行运动学分析。
2 研究方法
2.1 影片拍摄法
于2018年1月15号在山西田径运动管理中心,采用两台JVC GC-P100摄像机对陈阳动作技术进行拍摄。主光轴对准起跳前一步的位置,两台摄像机夹角为80°,拍摄速率为50帧/秒,机高1.5m,采用PEAK标定框架进行标定,然后进行三维定点拍摄。
陈阳的个人基本情况:陈阳,山西人,2001年5月出生。身高1.88m,体重67kg,握高4.75cm,运动等级为国家一级。2017年U18全国青少年赛男子冠军,成绩为4.60m;2017年第13届全运会青少年组男子冠军成绩为5.00m;2018年全国少年(U18)田径锦标赛男子撑杆跳高冠军,成绩为5.00m。
2.2 视频解析法
通过绘声绘影对视频进行剪切,采用美国APAS(Ariel Performance Analysis System)三维运动解析系统对陈阳最好成绩(5.0m)的技术录像进行解析。分析了106张图片,采样频率为50Hz,根据人体模型的标准选取了21个关节点,用低通滤波法对采集的数据进行平滑处理,截断频率为8Hz。根据研究需要,采集了本文需要的助跑倒数两步步长、速度、起跳时间、起跳角、起跳腿下肢关节的角度及上臂肩角和下臂肘角的运动学数据。
2.3 专家访谈法
根据本论文的研究需要,对参与男子撑杆跳高高水平运动员攻关服务的科研人员和相关专家进行专访,对优秀男子撑杆跳高运动员和教练员进行访谈,了解陈阳的动作技术特点及训练计划。
2.4 数理统计法
对所得到的数据通过Excel进行统计学处理,结合统计学和运动技术理论对相关结果进行分析整理。
2.5 对比分析
笔者拟将陈阳和张伟的技术动作进行对比分析,以找出陈阳技术动作中的不足和需要改进的地方。
张伟的个人基本情况:张伟,山东人。身高1.86m,体重77kg,握高4.80m,我国优秀成年男子撑杆跳高运动员,运动等级为国际级。2014年全国田径世锦赛冠军,成绩为5.60m;2015年亚洲男子田径世锦赛冠军,成绩为5.60m。
3 研究结果与分析
3.1 助跑最后两步技术特征分析
3.1.1最后两步步长特征陈阳在全运会上采用的是助跑距离14步(34m)的助跑起跳技术。Bartonietz和Wetter的研究得出:成年男子的职业生涯步数为16~22不等[3]。随着训练水平的提高,教练员将在2018年冬训将陈阳步数调整到16步。Según Petrov 研究证明足够的助跑长度和合理的步数为运动员的起跳提供了充足的速度[4]。在14步助跑中,最后两步的助跑步长最为关键,它直接反映助跑最后阶段的步幅和步频,影响着助跑速度、速度损失的程度以及起跳的效果[5]。多数优秀撑杆跳高运动员最后两步步长表现为“长-短”的特征[6]。我国优秀男子撑杆跳高运动员张伟在跳过5.60m时倒2步步长为2.05m,倒2步长/身高为1.10;倒1步步长为1.90m,倒1步步长/身高为1.01,步长的差值为0.15m。表1的数据显示:陈阳倒2步步长为1.91 m,倒2步长/身高为1.01;倒1步步长为1.79m,倒1步步长/身高为0.94,两步之差为0.12m。陈阳最后两步步长也表现出“长-短”特征,且步长/身高差值为0.07,与国内外优秀运动员步长变化规律很相似。持竿助跑的主要目的是为了在最后1 步脚触及地面瞬间产生较高的水平速度,获得适宜的动能,并使运动员在插穴起跳时处于较佳位置。马特维耶夫研究认为:持杆助跑时,最后1步步长要比倒数2步缩短10~20cm,是高水平运动员积极起跳的行为表现[7]。从表1数据上看,陈阳两步之差为0.12m,处于此范围之内。当然,运动员步长与其身体形态、速度、技术水平都有关系,步长的差值并非固定不变,它会随着运动员的竞技状态以及竞赛环境的变化而变化。
3.1.2最后两步速度特征助跑速度是撑竿跳高的基础,合理的助跑速度能够带来足够的动能,进而在起跳过程中转化为足够的势能。IAF生物力学研究项目中得出,撑杆跳高中助跑的速度和动能应在起跳阶段尽可能地达到一个较高的水平。然而如果达到最大,则不利于顺利通过横杆[9]。苏联波波夫的研究表明:助跑最后几步的速度,在许多方面对腾起速度和运动成绩起决定性作用[10]。Grabner 通过研究得出:撑竿跳高成绩与助跑速度的相关系数r=0.72,P<0. 01[11]。田敏对我国优秀男子撑竿跳高运动员助跑绝对速度利用率的研究也证实,运动员最后两步的平均速度与运动成绩呈正相关,r=0.84,P<0.01[12]。可以说,在排除一切其他条件外,助跑水平与运动成绩成正比关系。表2的数据显示:陈阳的倒2着地水平速度为8.001m/s,离地水平速度8.039m/s;倒数第1步着地水平速度7.777m/s,离地水平速度6.336m/s。张伟的倒2步着地水平速度为8.61m/s,离地速度为8.42m/s;倒1步着地水平速度为8.29m/s,离地水平速度为8.21m/s。与张伟的速度相比差距较大,陈阳助跑最后两步的速度尚需进一步提高。已有研究显示:2006年杨雁盛越过5.50米横杆时,最后两步的速度为9.30m/s,而国外优秀撑杆跳高运动员布勃卡的最高速度更是达到了9.60m/s。运动员在起跳时要避免过分制动和重心轨迹的突变。Angulo-Kinzler通过研究得出,合理的起跳需要保持一定的水平速度,并产生足够的垂直冲力,以最大限度地增加助跑到撑杆起跳的能量转移,以优化它们在起跳时的位置,增大角速度,为后期的悬垂、摆体阶段提供能量需求[13]。

表1 最后两步助跑步长
注:张伟数据来自张鑫[8],下同。
最后两步水平速度的差值,可以间接地反映运动员最后倒数第一步和倒数第二步助跑的衔接水平,以及运动员在助跑最后两步的降竿和举竿等动作影响程度。差值越小,说明最后两步助跑衔接越好。表2的数据显示:陈阳的助跑速度呈现递减的趋势,着地助跑速度差值为0.224m/s,离地助跑速度差值为1.703m/s;张伟的最后两步助跑速度均呈现出递减的趋势,着地水平速度差值为0.32m/s,离地水平速度差值为0.21m/s。相对于张伟,陈阳水平速度下降非常明显,说明最后两步助跑衔接的紧密程度及降竿和举竿水平明显弱于张伟。国外选手优秀撑杆跳高运动员布勃卡最后两步助跑水平速度的差值为0.13m/s,且水平速度呈上升趋势,因而获得很高的助跑绝对速度利用率。所以,陈阳一方面需要提高持杆助跑的加速能力,另一方面要重视动作衔接,提高助跑速度的转换效率。Schade等人研究得出,运动员在起跳时要避免过分制动和重心轨迹的突变。为了弥补助跑速度的损失,必须在起跳时最大限度地发挥肌体的动能,且肩部、手臂和躯干的肌肉要处于一种高度的收缩状态[14]。
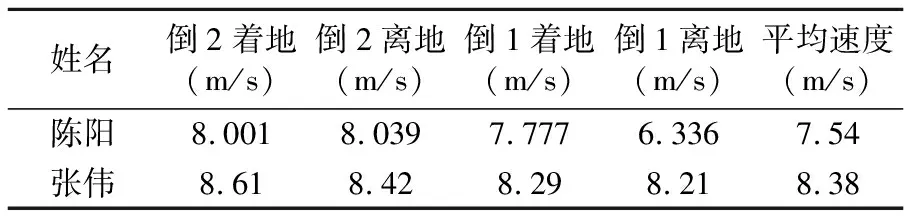
表2 陈阳最后两步助跑速度
3.2 起跳阶段动作分析
3.2.1起跳时间起跳技术完成得好坏,直接影响着助跑速度的转化情况,是助跑阶段和后续空中动作阶段的有机组成部分,是助跑动能转化为撑杆势能的关键环节。起跳时间反映运动员完成缓冲和蹬伸动作的快慢。已有研究表明:撑杆跳高运动员在起跳过程中起跳时间与成绩呈显著性负相关关系,r=-0.8667,P<0.05[15]。说明起跳时间越短,起跳腿完成缓冲和蹬伸的动作越迅速,越有利于在起跳过程中保持较大的水平速度,减少因起跳制动带来的能量损失,提高动能转化为撑杆势能的效率。于兴文指出:世界优秀撑杆跳高运动员的起跳时间一般在0.12~0.15s区间内。陈阳采用的是“自由起跳”技术。陈阳的起跳时间为0.16s,张伟的起跳时间为0.12s,陈阳起跳时间比张伟慢0.04s,且超过最佳起跳时间区间上限0.01s。从陈阳的起跳时间来看,与国内外优秀运动员尚有一定差距。
3.2.2起跳离地时刻身体的起跳角起跳阶段各个角度作为评定起跳技术的重要指标。撑竿跳高的起跳技术不仅关系着能否将助跑中获得的动能尽可能转化为人体向上的势能和弯竿、竖竿的能量,而且起跳动作的质量又关系着后继的悬垂摆体及杆上动作的成败。Angulo-Kinzler 等研究发现为了达到更好的起跳效果,运动员必须尽量减少水平速度的降低并产生足够的垂直速度来优化能量转化过程。Linthone对其进行了补充。他认为起跳时的角度对运动员在起跳时的能量传递的效果具有显著影响[16]。
起跳角度是起跳腿离地瞬间,起跳腿和地面所组成的夹角,决定起跳动能转化为使撑竿弯曲、摆动和运动员摆动的力量[17]。表3的数据显示:陈阳的起跳角为79.23°,张伟的起跳角为82.43°。相对于张伟,陈阳起跳角低3.2°。陈阳起跳角度较小,属于正常范围内,适合撑杆跳高起跳技术,可以使弯杆力量充足,为悬垂、摆体创造有利的前提。

表3 起跳离地时刻身体的起跳角
3.2.3起跳过程中起跳腿踝、膝、髋关节角度变化踝关节、膝关节、髋关节在撑杆跳高起跳过程中会随着动作的改变而发生相应的变化(如图1)。陈阳的踝关节和膝关节变化都是呈现先下降后上升的趋势,且起跳时较落地时差都为正值。这为运动员的起跳起到了一定的缓冲作用,有利于后续能量的转化;髋关节的变化则相反,髋关节呈现先上升后下降的趋势,且差值为负值,这与运动员没有伸展髋部有关。
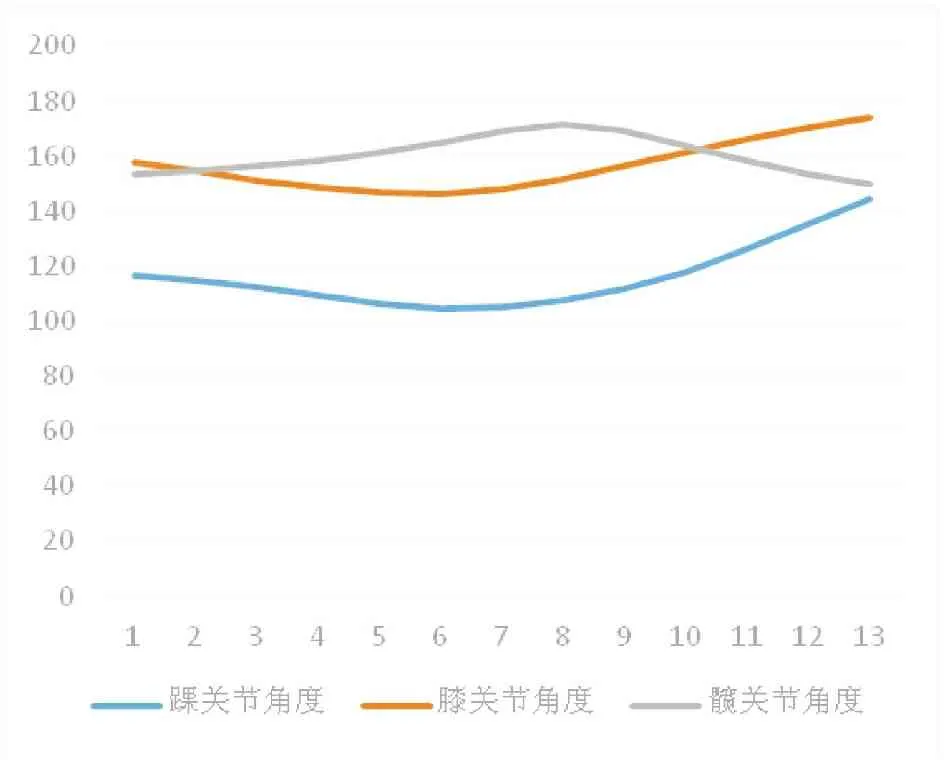
图1陈阳起跳过程中踝、膝、髋关节角度变化图
踝关节作为一个末端关节,它提供了人体在缓冲退让与蹬伸发力中60%的力量。踝关节的角度变化可以体现运动员在最后助跑阶段其关节力量以及关节柔韧性,它能够减缓助跑速度给身体造成的反作用力。从表4可以看出陈阳起跳腿的踝关节角度着地时刻为116.65°,离地时刻为144.498°,踝角变化幅度为27.848°;张伟的踝角着地时为120.22°,离地时刻为149.34°,踝角变化幅度为29.12°。陈阳比张伟的踝关节变化幅度小了1.272°。陈阳的屈伸范围较小,说明起跳腿的支撑稳固性较强,更有助于能量的转换,使蹬伸动作能够充分完成。

表4 起跳过程中踝关节的角度变化
膝关节的关节形状决定了大部分接触应力的作用方向,而各种力量(动力学)所获得的平衡效果又决定了膝关节的位置和朝向(运动学)。起跳腿单腿站立时,膝关节负重大,它所承担的压力为体重的两倍[18]。它对于维持人体的稳定性和功能性起着重要的作用。屈朝辉的研究得出,运动成绩与背水平左膝角具有显著相关性(P=0.005<0.01),相关系数r=0.944[19]。从表5可以看出陈阳起跳腿的膝关节角度着地时刻为160.089°,离地时刻为173.92°,变化幅度为13.831°;张伟的膝关节角度着地时刻为177.45°,离地时刻为178.45°,变化幅度为1°。陈阳的膝关节着地角度较张伟的小17.361°,陈阳的膝关节变化幅度较张伟的要大12.831°。根据运动生理学和运动生物力学,撑杆跳高中着地时膝关节角度应较大,膝关节角度与支撑力呈正相关,膝关节变化幅度角度大,会使股四头肌、腓肠肌、比目鱼肌等肌肉长度接近初长度,从而加大了大腿前侧肌群和小腿后侧肌群的幅度,有助于减小运动员的膝角变化幅度,使缓冲时间尽可能降低,有助于运动员在快速的助跑中达到起跳前的支撑和蹬伸的力量[20]。已有研究显示:我国优秀男子撑杆跳高运动员起跳时的起跳腿的膝关节角度大概为175°,而国外优秀撑杆跳高运动员布勃卡起跳时的起跳腿的膝关节角度能够达到180°。
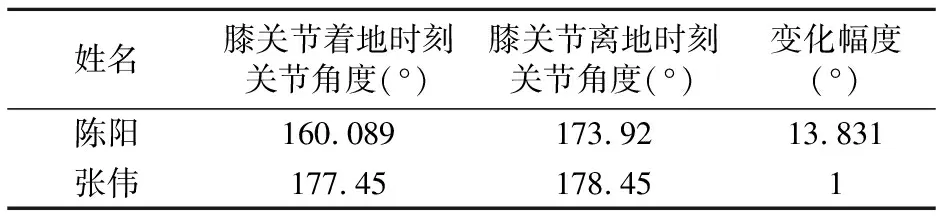
表5 起跳过程中膝关节的角度变化
髋关节是人体最大的负重关节。髋关节是一个球轴承的运动结构,主要动作可分解为在三个互相垂直平面上的运动:矢状面上的屈伸、冠状面上的内收外展,以及横断面上的内外旋转。它是连接躯干和下肢的重要关节,具有承上启下的作用,是力量传递的枢纽。恰到好处的髋关节动作能够减小最后一步的步长、加速着地速度、避免不必要的速度损失,同时能够减小着地时的冲击力、减少缓冲时间、提高起跳离地前重心高度、加快摆动腿速度,为成功过杆建立有利前提。从表6可以看出陈阳的髋关节角度着地时为152.449°,离地时角度为149.55°,变化幅度为2.899°;张伟的髋关节角着地时为171.76°,离地时刻为176.56°,变化幅度为4.8°。相对于张伟,陈阳的髋关节角着地时低18.811°,离地时低27.01°。陈阳蹬伸送髋动作不明显,且没有叠腿,出现了塌腰、屈髋的现象,增加起跳腿支撑时间,会使人体重心降低,不利于后续动作的完成。因此,陈阳一方面在最后一步跑时需要将足跟尽可能的踢到臀部,另一方面需要加强核心肌肉的力量。
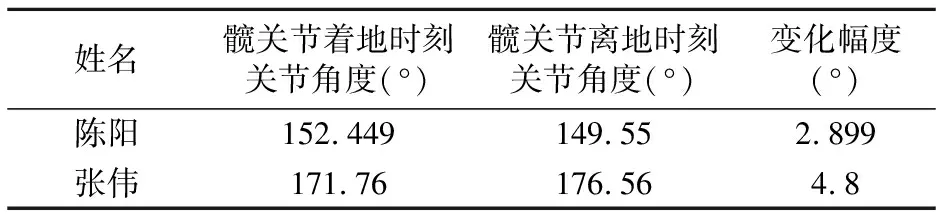
表6 起跳过程中髋关节的角度变化
3.2.4上握手臂肩关节与下握手臂肘关节的角度分析上握手臂肩角变化趋势呈现先上升后基本稳定的趋势,陈阳的肩关节控制在一定的范围内,使肩关节在起跳过程中达到了充分伸展。陈阳的下臂肘角呈现先下降后上升的趋势,且起跳较落地时的差值为正值,肘关节角度在140°~160°之间,整体值较小,不利于运动员对撑杆形成足够的力(如图2)。
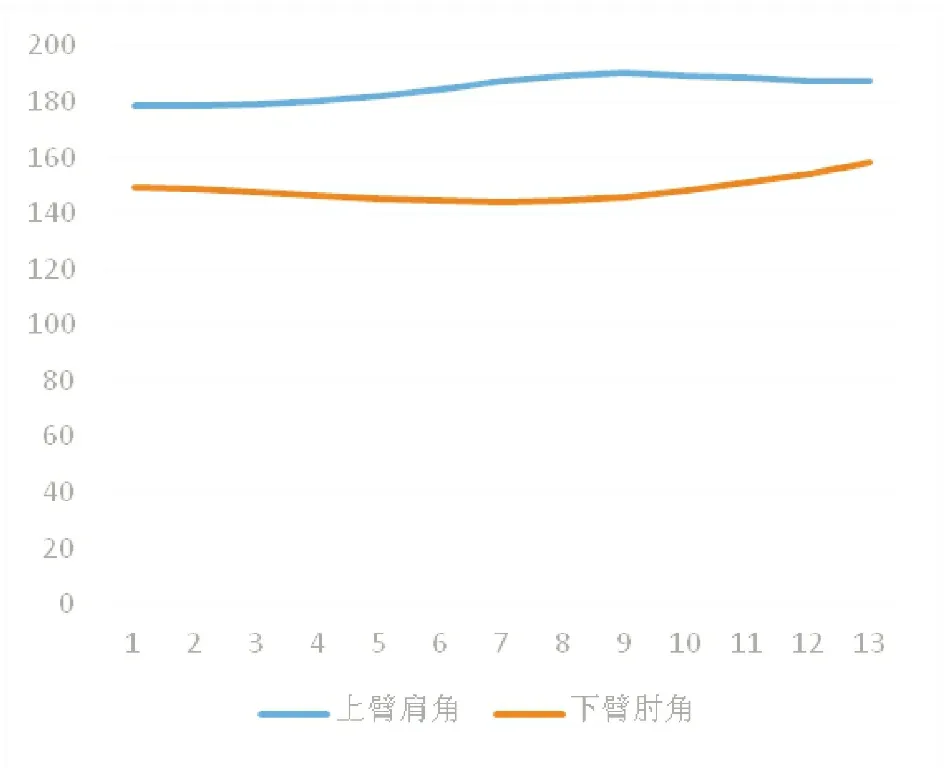
图2陈阳起跳过程中上握手臂肩角和下握手臂肘角变化图
上握手臂肩关节与下握手臂肘关节的变化,能够反映运动员起跳时肩关节的伸展程度和肘关节的紧张程度。有研究显示:肩关节角度值越接近180°说明起跳离地瞬间肩关节伸展的越规范,较大的肘关节角度可以使“人—杆”形成稳定的支撑,有利于弯杆与竖杆[21]。从表7可以看出陈阳的上臂肩角着地时为182.212°,离地时为187.534°,下臂肘角着地时为149.533°,离地时为158.071°;张伟的上臂肩角着地时为185.43°,离地时为195.26°,下臂肘角着地时为175.44°,离地时为169.34°。陈阳的肩关节在180°左右,陈阳较张伟的肘关节着地时低25.907°,离地时低11.269°,陈阳的下臂肘关节支撑力不够充足,需要加大下臂肘关节角度。已有研究显示:2007年杨雁盛在跳过5.60m时,上臂肩角着地时为159.67°,离地时为174.88°;下臂肘角着地时为170.77°,离地时为166.85°。最大的肩部伸展可以创造一个最佳的能量负载环境,使撑杆跳运动员能够助跑的动能转化为势能,并为后续阶段以允许他们的身体绕肩轴线更大程度地进行旋转。Tidow通过研究得出手臂角度的差异是由助跑阶段采用的不同起跳位置造成的[22]。陈阳在跳过5m时起跳距离为3.5m,我国优秀撑杆跳高选手杨雁盛在跳过5.45m时,起跳距离为3.94m,陈阳在之后的训练中应不断增大起跳距离。Hay通过研究得出通过调整起跳位置,能够使运动员的下臂起到更好的支撑和积极的向前推的作用,从而减小惯性力矩[23]。McGinnis认为保持下臂支撑也会在杆上产生扭矩,从而最大限度地减少了在此过渡阶段的能量损失[24]。
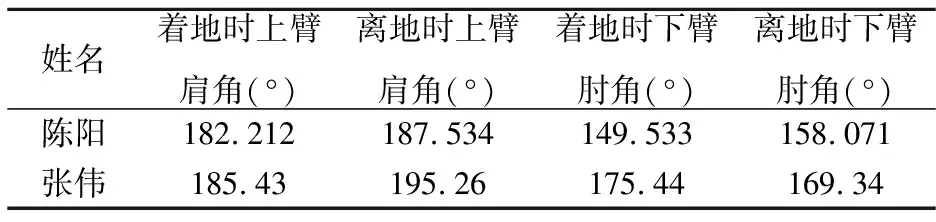
表7 上握手臂肩关节与下握手臂肘关节的角度分析
4 结论与建议
(1)陈阳最后两步步长表现出“长-短”的特征,有利于后续动作的完成,且步长/身高差值与国内外优秀撑杆跳高运动员接近,但陈阳的绝对速度水平较差,而助跑速度对运动成绩起着决定的作用。故陈阳应提高其绝对速度能力的训练,加强持杆助跑能力。
(2)陈阳采用的是“自由起跳”技术,但陈阳的起跳时间较长,与国内外优秀运动员尚有一定差距。故陈阳应加强自身的起跳技术,掌握自由起跳技术的动作要领。
(3)陈阳的起跳角属于正常范围,与国内外优秀撑杆跳高运动员的起跳角接近。
(4)陈阳的踝关节角属于正常范围,膝关节角、髋关节角与国内外优秀运动员存在一定的差距,存在塌腰、屈髋的现象。故陈阳应加强腿部绝对力量和核心力量的训练,使各关节角度都达到国内外优秀运动员的标准。
(5)陈阳的肩关节角度符合撑杆跳高的技术要求,但肘关节角度较小,对杆的支撑力不够充足。故陈阳应加长自己的起跳距离,使“人—杆”形成稳定的支撑。
猜你喜欢
延河(下半月)(2022年12期)2022-02-01 02:10:46
成都信息工程大学学报(2021年5期)2021-12-30 06:25:30
华人时刊(2021年23期)2021-03-08 09:27:16
金秋(2020年14期)2020-10-28 04:15:40
好日子(下旬)(2019年9期)2019-07-09 03:17:48
电影文学(2018年10期)2018-12-10 00:48:32
中华家教(2018年9期)2018-10-19 09:30:00
中学生数理化·八年级数学人教版(2017年1期)2017-03-25 22:04:32
河北科技大学学报(2015年5期)2015-03-11 16:16:37
电测与仪表(2014年2期)2014-04-04 09:04:00