基于GPS和GSM的车辆智能定位与跟随研究*
2019-03-06 06:54于文泰段敏白松让杨晓丽郑苏
汽车实用技术 2019年2期
于文泰,段敏,白松让,杨晓丽,郑苏
(辽宁工业大学 汽车与交通工程学院,辽宁 锦州 121001)
前言
随着“中国制造2025”和“互联网+”战略的实施,汽车尤其是新能源汽车制造进入了高速增长期,汽车逐渐成为人们日常生活中重要的出行工具,与此同时在城市道路尤其是在无信号灯十字交叉口造成的交通拥挤现象频频发生,因此在城市道路进行多车定位于跟随成为了研究热点[1-2]。基于全球定位系统(GPS)和全球移动通信系统(GSM)的实时定位和无线传输特性[3],开发了一种多车智能定位与跟随控制系统,对采集到的前车地理位置信息进行解析组包成短消息并通过远程无线网络传输到跟随车控制系统上,为跟随车主提供准确可靠的前车位置服务,及时提醒跟随车主进行有序行驶,提高道路通行效率。
1 系统总体结构
本系统设计在前后车上安装跟随控制系统硬件平台,前车的硬件平台采用STM32微控制器作为主控芯片,基于GPS定位技术对行驶工况下的前车采集其地理位置信息,并送STM32对GPS信息帧进行解析、提取、转换等运算处理后,重新组包为短消息格式的定位信息,将该定位信息通过中国移动通信GSM网络无线传输到跟随车硬件接收平台上,进行解析前车定位信息并显示到液晶显示屏上,系统总体结构框图如图1所示。系统硬件平台主要包括STM32微控制器最小系统电路、GPS地理位置信息采集电路、系统供电电路、GSM远程无线通信电路、串口调试电路等各个具体功电路。

图1 系统总体结构框图
2 系统硬件设计
系统硬件中的GSM电路为直流(DC)5V供电、GPS模块和STM32微控制器为直流3.3V供电,考虑到汽车行驶状态下提供12V直流电源的工况,采用车载12V电源进行DC-DC稳压出5V和3.3V,设计中通过LM2596S-5.0芯片稳压出5V,该芯片具有3A输出电流,最大到40V的宽电压输入特性[4],完全满足GSM模块中射频器件的供电,同时将稳压出的5V作为XC6206-3.3V芯片的输入电压,输出得到GPS模块和STM32所需的3.3V电压。系统供电电路原理图如图2所示。
在本系统中基于UBLOX NEO-7M GPS模块设计了前车定位信息采集电路,该模块是采用低功耗主芯片设计的超小型GPS接收模组,定位准确,最大更新速率达到10 Hz,适用于汽车跟踪定位、汽车物联网、自动驾驶等领域。模块上电后,通过有源天线自动搜索卫星,然后通过NMEA-0183标准GPS接收机输出协议解析出所定位汽车的经纬度信息、海拔、航向、速度、用于定位的卫星数、可见卫星数、 UTC时间等信息[5]。设计中GPS模块通过串行通信接口(UART2)与STM32微控制器进行物理连接,该电路如图3所示。
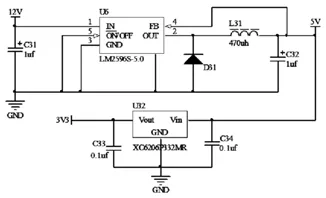
图2 系统供电电路原理图

图3 GPS定位信息采集电路原理图
3 系统软件设计
系统软件采用嵌入式C语言在MDK-ARM 集成开发环境中进行编写代码,然后编译成二进制机器码文件,运行于STM32微控制器上。在前车上的软件主要包括:初始化模块、GPS定位信息采集模块、GSM短信组包发送模块等;跟随车上的软件主要包括:初始化模块、GSM短信接收模块、GPS数据解析和显示模块等。前车采集发送和跟随车接收、解析、显示等两部分软件总体流程图如图4所示。

图4 前车与跟随车软件总体流程图
4 系统测试和分析
系统硬件平台已制作完毕并进行前后车跟随调试,当前车车进入行驶状态时,此时采集GPS定位信息与实际的定位相比,误差在1~2米范围内, 同时GSM网络无延迟,跟随车能及时收到前车发来的信息并解析同时显示在串口小助手上如图5所示,达到了设计目的。

图5 系统测试GPS定位信息解析图
5 结论
基于GPS和GSM技术的实时定位和远程无线传输特性,开发了一种多车智能定位与跟随控制系统,对采集到的前车地理位置信息进行解析组包成短消息并通过远程无线网络传输到跟随车控制系统上,为跟随车主提供准确可靠的前车位置服务,及时提醒跟随车主进行有序行驶,提高道路通行效率,具有一定的工程应用价值。
猜你喜欢
中学生数理化(高中版.高一使用)(2021年4期)2021-07-19
中国信息化周报(2020年15期)2020-05-11
语文世界(小学版)(2018年3期)2018-03-22
中学生理科应试(2017年4期)2017-07-08
福建中学数学(2016年7期)2016-12-03
中国高新技术企业(2015年23期)2015-06-24
现代电子技术(2009年9期)2009-06-25
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14
棋艺(2000年18期)2000-06-14