
舰载机截击引导仿真研究
2019-03-05 01:37袁姗姗
现代计算机 2019年3期
袁姗姗
(四川大学计算机学院,成都610065)
0 引言
近年来,截击引导[1]已成为军事领域的研究热点,取得了许多重要的成果。白剑林等研究了机载雷达目标编队试飞的全向引导方法,提出了编队试飞的指挥引导实现模型[2];周焘等将引导势的概念引入到战斗机的威力评估中,用于引导过程决策[3];彭建亮等针对战场威胁环境特点研究了整合威胁回避战术的战绩引导律的设计问题,提出了追踪引导律设计方法[4]。以上文献在建立指挥引导模型时,均假定引导过程发生在平面内,距离及航向的计算均在平面直角坐标系下进行,且缺少对算法精度和效率的评估。本文在分析截击引导过程及其战术需求的基础上,提出二次转弯算法,对算法的计算精度及效率进行了定量分析和讨论。
1 作战空域规划分析
舰载机按计划组织升空迎敌的作战空域如图1 所示。图中,“舰载机起飞带(线)”是相对于从地面值班状态遂行战斗行动而言,而“开始引导带(线)”是相对于从空中值班状态遂行战斗行动而言。舰载机起飞带是指舰载机起飞线1 和起飞线2 之间的空间区域,当目标位于这个区域时,可保证在预定的消灭带消灭目标。消灭带是指可用消灭线和规定消灭线之间的空间区域。

图1 舰载机防空作战空域图
当我机处于机场待战时,根据敌机的当前位置,对应于舰载机起飞带(线),有我机进入一等准备的时刻、起飞时刻的解算问题。对应于消灭带,有我机可能的拦截时刻解算问题。
2 二次转弯截击算法
截击指挥引导过程中,首先要指挥引导我机进入预定位置,解决战术优势问题,使得我机飞向目标进行攻击时处于攻击的主动态势,我机最终与目标在一点遭遇。
两次转弯截击法简称两次转弯法,是在一次转弯法[5]的基础上再增加一个摆位转弯。摆位转弯的目的是为接敌创造条件的摆好位置态势。从某种意义上讲,两次转弯法已包含了一次转弯法,有的称之为立即转弯截击法或侧后攻击法。两次转弯法,在指挥引导中应用较广,因为无论是手工指挥引导,还是自动化指挥引导,很少能在我机起飞后只经过一次转弯就能成功地截击上空中目标,通常要经过两次或两次以上的转弯才能截击上空中目标。所以,两次转弯法又称为基本截击法。
必须说明的是,两次转弯法和一次转弯法不是孤立的,在实际的自动化指挥引导中,它们是紧密衔接并自动转换的。通常,在指挥引导的出航阶段可以两次转弯法显示出截击的预案,而在摆位转弯以后自动转入接敌转弯时机的解算。接敌转弯解算,就是一次转弯法解算。在接敌转弯之前和之后都离不开一次转弯法。
2.1 应用场合
两次转弯截击法适用于我第二代飞机对敌第二代飞机空战或飞机截击巡航导弹,能保证在接敌转弯改出后的进入角、平飞搜索时间和落后距离,适用于截击我歼击机静升限以下的目标。我机的飞行剖面在接敌阶段近似于等高度飞行,速度基本上为等速。
当进人角XC0<90o时,我机是从尾后进人。为保证截击的隐蔽性和突然性,当接敌转弯改出后的我机速度大于敌机速度时取较大的落后距离d,我机就能处于敌机的侧后方;当我机速度小于敌机速度时,应把进入角选取大一点,使得接近过程中,敌机尽可能晚地发现我机,进入方向一般选取占据阳光有利位置的一侧或尽快接敌的一侧,由子自然因素的千变万化,可由人选择从敌机的左侧或右侧进入来加以弥补。
2.2 运动方程
如图2 所示,两次转弯截击法的过程,是指从我机作摆位转弯起,经过摆位转弯、平飞、接敌转弯,平飞搜索直至开始攻击目标(若d=0 时,即与目标遭遇)的过程。
设敌机起始位置为M(xm,ym),水平直线飞行,不机动,航向为Km,速度为Vm,我机位置为W(xw,yw),航向为Kw,速度为Vw。此时我机准备转弯,经过延误时间ty在W1开始转弯,于W2改出转弯,转弯半径为R1,保持航向为K2,飞行S2到达W3作接敌转弯,转弯半径为R2,于W4改出转弯,沿接敌进入航向K3经时间tp飞至攻击点W5,此时敌机飞至J,W5J 为预定射击距离d,XC0为预定进入角。由矢量加法法则可得:

即:
式中:
式(2)可作如下简化处理:

式中:

2.3 迭代解算
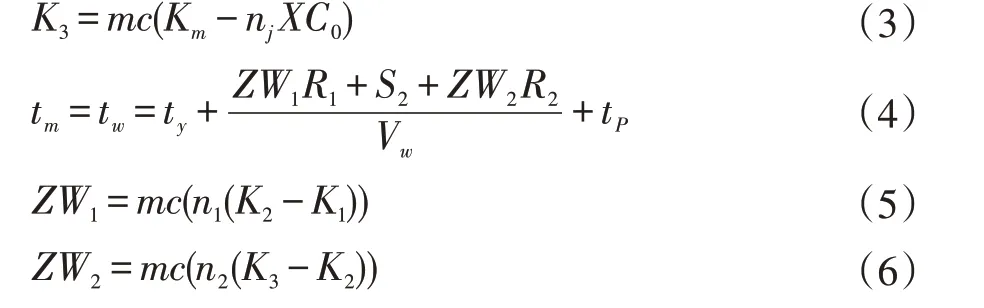
将式(5)、式(6)、式(8)代入式(4),可得一个关于tm的一元方程,即:


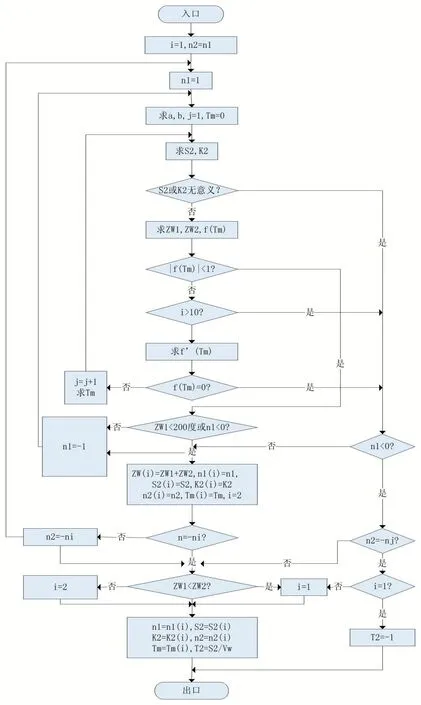
一般情况下我机在进行两次转弯飞行时,敌我机相距还较远,因此,我机摆位转弯后的改平航向K2通常与敌机航向 Km呈逆交叉态势,此时cos(Km-K2)<0。要不然,我机速度应不低于敌机速度(Vw>Vm)。这样,由式(10)可知f(tm)是一个单调增加的下凹函数,而f(0)<0,方程有唯一解,这样,可以迭代求得tm,同时可求得S2、K2。若Vw nc由下式定义: 在上述推导过程中,已假定转弯方向nj、n1、n2皆为已知量,且一般情况下取nj=nc(式(11)),也可人工干预选定。在具体解算过程中,为了尽快求得合适的解,可以编排一定先后顺序来确定n1、n2的值。 通常,我机摆位转弯方向随机性较大。但摆位转弯后的平飞航向与敌机来向往往呈逆交叉态势,故可以选取接敌进入方向作为接敌转弯方向,即从敌机的左侧进入时,我机的接敌转弯方向为左转弯,反之亦反。这样接敌转弯的角度ZW2较小,转弯时间较短。 (1)基本约定 单位约定:与一次转弯截击法相同。 输入常量(已知参数):Vw、ty、K1、R1、R2、K3、tp、d、Swm、Kwm、Vm、Km。 中间变量:nj、n1、n2、ZW1、ZW2。nj、n1、n2交给迭代算法来决定,而ZW1、ZW2均为K2的函数。 待定参数:K2、S2、tm为实际待定的三个变量。 输出变量(待求参数):t1、t2、tm。 (2)算法设计 采用两次转弯法时,解算流程如图3 所示。 图3 解算流程 Step1:令i=1,n2=nj; Step2:先取n1=-1(先设定我机左转),进行上述过程的迭代解算,若ZW1<3.49(200o),可认为求得的解是合适的,转Step3;否则取n1=1(设定我机右转),进行迭代求解。 Step3:令n2=-nj,n1=-1,进行迭代解算,若ZW1<3.49(200o),则转Stpe4;否则取n1=1,进行迭代求解。 Step4:将n2=nj时求得的解,与n2=-nj时求得的解进行比较,选取两次转弯角之和较小的解。另外,还可以与进人方向为-nj的预案进行比较,确定从哪一侧进入的预案两次转弯角之和最小。 在 图3 中,i、变 量ZW(i)、n1(i)、S2(i)、K2(i)、n2(i)、tm(i)作为中间结果,用于选出两次转弯角之和较小的解;j 为迭代计数器,迭代超过10 次时作无解处理;tm的初始值为0,迭代的最后结果的误差小于1 秒;t2=-1表示无解。 本文对舰载机截击引导算法进行了分析,并对其中的关键技术作了初步的探讨,虽然没有给出具体的实现方案,但对于预警机指挥引导系统的设计还是有一定的指导意义。然而本文中还提到了很多问题亟待解决,如何在截击过程中规避禁区,如何实现随目标的方向及速度实时调整截击路线,以及如何选择最优的拦截机起飞位置或者出发空域。
2.4 具体解算
3 结语
猜你喜欢
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18
科技与创新(2021年24期)2022-01-03
军民两用技术与产品(2021年10期)2021-03-16
环球时报(2021-02-01)2021-02-01
民用飞机设计与研究(2020年4期)2021-01-21
科技视界(2020年8期)2020-05-18
民用飞机设计与研究(2019年4期)2019-05-21
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
