基于机器视觉的施工危险区域侵入行为识别方法
2019-03-02 01:26:10骆汉宾方伟立
土木工程与管理学报 2019年1期
高 寒, 骆汉宾, 方伟立
(华中科技大学 土木工程与力学学院, 湖北 武汉 430074)
建筑施工具有工种交叉,施工场地狭小,施工机械种类多,作业环境复杂等特点,施工现场存在着许多危险区域[1]。随着工程建设规模越来越大,施工现场广泛分布的危险区域(机械作业半径内、洞口、临边等)给工人的生命安全带来严重威胁,同时也会造成重大的经济损失。工人进入危险区域内继而引发的事故频现,2014年2月23日,福州火车站西侧的“福州市站西路建设工程”项目工地发生一起安全事故,一名工人被正在作业的挖掘机击中当场身亡。2010年12月5日上午9点,杭州地铁一号线火车东站项目部工地上,一名工人在基坑边顺着松散的泥土滑入基坑,经抢救无效死亡。擅自进入危险区域是导致这些事故发生的直接原因,要预防这些事故的发生,需要对这些擅入危险区域的违规行为进行矫正,行为矫正通常包含对被观察者(工人)行为的识别、反馈和强化等过程,而行为识别是行为矫正的第一步,首先要识别出进入危险区域的行为,才能对工人的行为进行后续矫正。
在施工现场危险区域侵入行为识别方面,国内外学者做了相关研究。Kim等[2]提出了基于射频识别(Radio Frequency Identification,RFID)的位置感应系统,识别进入起重机工作范围内的工人位置,以保证钢铁工业中货物起重机下工人的安全;郭红领等[3]通过对危险区域的定义与分类,建立了集成BIM(Building Information Modeling)和RFID技术的工人实时定位与安全预警系统模型,可以识别工人是否进入危险区域;Chase等[4]把RFID标签贴到重型机械上,识别出进入机械工作范围内的工人;刘文平[5]提出了结合GPS(Global Positioning System)和超宽带(Ultra-wideband,UWB)的综合定位方法,并判断人和机械的距离,自动识别工人位置;Girett等[6]通过UWB跟踪佩带射频标签的工人,并根据工程经验划分危险区域,通过工人佩带的报警器对靠近危险区域的工人进行识别并发出提醒。Maalek等[7]提供的UWB技术可以获取工人和施工机械的位置,识别出施工机械附近的工人,可以有效提高工地安全监控的效率。以上研究主要集中在利用UWB,GPS,RFID等定位技术对工人和机械的位置进行跟踪,以此来识别工人进入危险区域的行为。
这些定位技术都可以得到施工人员和机械位置信息,来识别工人是否进入机械的工作范围,而对于大面积的危险区域如基坑,需要布置大量的传感器,实际操作复杂,而且在工人身上附着传感器,会干扰工人的施工操作,而人工观察耗时费力,容易受观察者的精神状态影响,主观且容易疏忽遗漏。
目前许多学者开始使用机器视觉技术来监控和分析土木工程活动,机器视觉技术无需与观测对象接触,不会影响被观测者的正常工作,十分安全可靠,广泛用于土木工程的安全管理。Han等[8]用Kinect提取工人的人体骨架来识别爬梯子过程中的不安全动作。安全护栏作为一种防止工人从高处跌落的关键保护措施,Kolar等[9]开发了基于卷积神经网络(Convolutional Neural Network,CNN)的安全护栏检测模型,提高施工现场的安全检查效率。Fang等[10]使用Faster R-CNN算法来识别安全帽,用于检查施工人员在不同施工现场条件下安全帽佩戴状况,并且可以促进安全检查和监督的改进。Zhu等[11]通过卡尔曼滤波来实时定位工人和施工机械的位置并且预测其运动趋势,防止工人和机械发生碰撞。
本文提出利用机器视觉方法,通过现场视频展示工地施工实时情况,对不同危险区域进行自动化连续监测,有助于快速、准确而全面识别危险区域侵入行为。本文提出了一个基于计算机视觉的目标检测方法来监控工地的危险区域,识别工人违规进入危险区域的行为,为行为矫正提供事实依据,帮助减少危险区域的事故发生。
1 危险区域的识别与划分
根据《企业职工伤亡事故分类标准》和《房屋市政工程生产安全事故统计》,2015年,高处坠落、物体打击、坍塌和起重伤害事故约占事故总数的90%,进入危险区域是这些事故发生的直接原因。工地现场施工环境复杂,施工人员水平参差不齐,缺乏安全意识,对危险区域的判断不清,容易发生擅入危险区域的行为。因此本文在施工现场划定危险区域,并对危险区域进行视频监控,识别靠近危险区域的工人。本文通过文献调研和规范查询,针对几类主要事故,研究了危险区域划分规则,界定了危险区域的范围,并进行实时监测,希望对危险区域进行监控,并识别工人违规进入危险区域的行为。
本文将危险区域划分为高处坠落区、物体打击区、机械碰撞区、坍塌区等四类,如表1所示[5]。
2 侵入行为识别方法
基于上述危险区域划分规则,本文使用计算机视觉领域中的目标检测方法对危险区域内的运动目标进行检测。首先通过施工现场的可移动式摄像头聚焦预先定义的危险区域,并划定危险区域范围,然后通过运动目标检测算法对图像进行背景建模,当视频图像中有物体运动时,上述方法会自动识别出图像中的运动物体(工人),方法流程如图1所示。
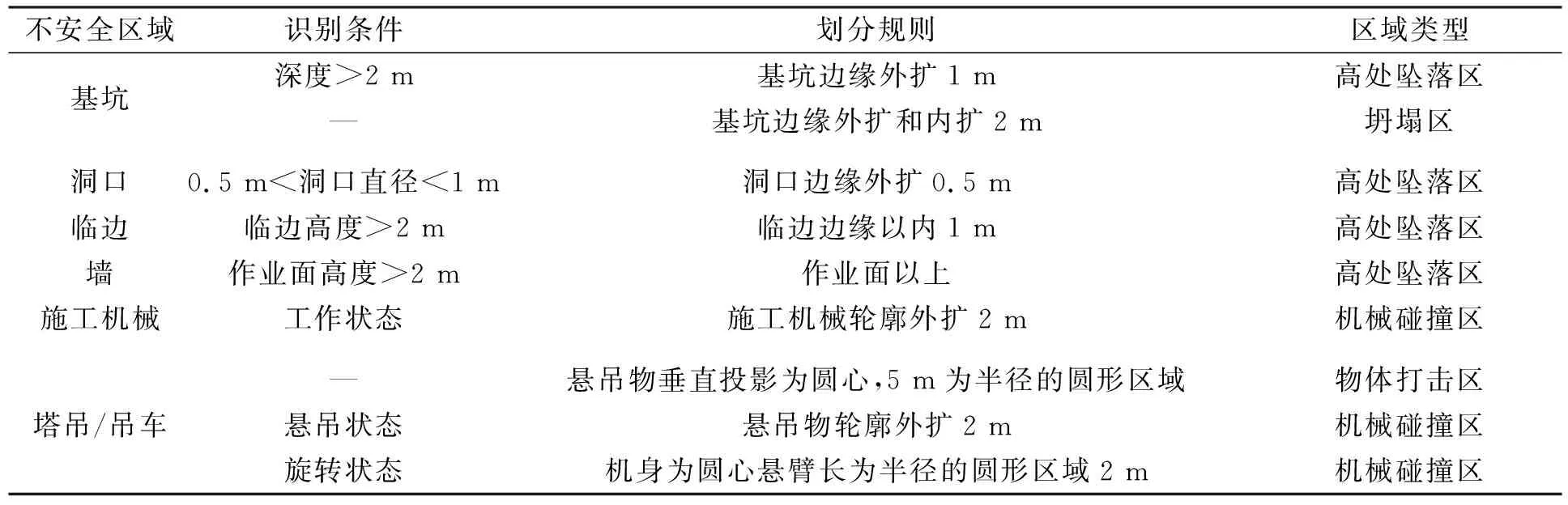
表1 施工现场危险区域识别条件与划分规则
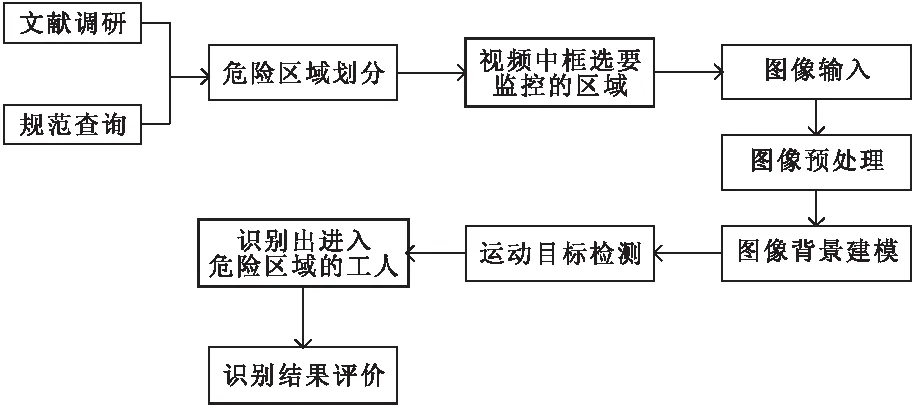
图1 研究技术路线
施工现场是一个复杂的动态环境,本文采用可移动摄像头来动态观察工地的情况,由于相机的运动和工人的移动,图像中的背景图像和前景目标都会不断地发生运动,我们需要在一个连续视频序列中的每一帧监控画面中都找到感兴趣的运动目标,来实现运动目标检测过程,为了克服相机移动的影响,本文使用如下检测方法,具体图像处理过程如图2所示。该方法主要分为以下三个步骤:
Step1:对输入的图像进行预处理;
Step2:使用双模单高斯模型对图像背景进行建模;
Step3:前景目标(工人)检测。
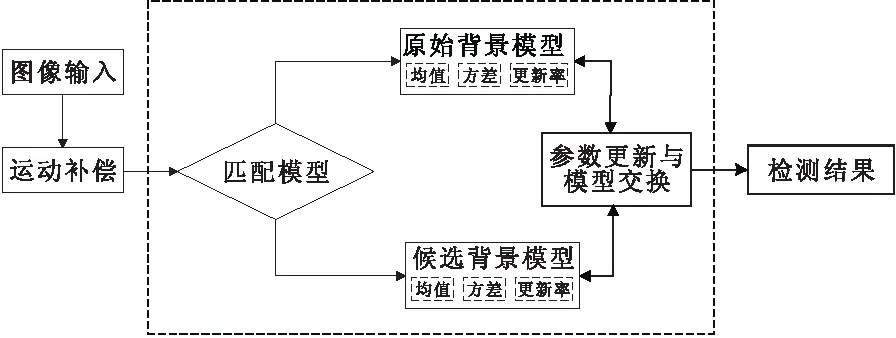
图2 算法框架
2.1 运动补偿
获得原始图像后,首先通过高斯滤波和中值滤波对图像进行预处理,以过滤噪声。本方法采用可移动式摄像头获得的动态视频序列,故由于背景的运动,t-1时刻的模型不能直接应用于t时刻的目标检测过程。对背景进行建模之前,必须先对图像进行配准,通过图像配准,可以将由于相机运动得到的动态背景图像序列转化为静态背景图像序列,便容易检测出运动目标。但是图像配准误差会导致在某些像素中应用错误的模型,因此,本文使用t-1时刻的模型数据来构造t时刻背景模型。为了估计相机的运动参数,把t时刻的输入图像分为32×24的网格,使用网格线上的交点作为要跟踪的特征点,并对t-1时刻的图像使用klt光流法,然后计算出这些特征点的运动向量[12]。然而此刻的计算结果并不能完全准确匹配前后两帧图像,其中不可避免地会产生一些错误的匹配结果,因此需要对结果进行筛选,消除错误匹配,以提高鲁棒性。RANSAC(Random Sample Consensus)算法是一种简单且有效的去除噪声影响,估计模型的一种方法,此算法对图像噪声和特征点提取具有很好的鲁棒性,可以准确剔除错误匹配点对[13]。通过RANSAC算法筛选出匹配错误的点对,然后根据筛选后的特征点的运动向量计算得到单应性矩阵,通过单应性矩阵,找到t-1时刻的背景模型到当前帧的映射,从而将相邻两帧的图像配准。
2.2 双模单高斯模型
由于相机位置并不固定,为了提高运动目标检测的准确性,我们使用具有可变学习率的Dual-mode SGM(双模单高斯模型)来对背景进行建模[14],该模型的建立主要分为两个部分。
2.2.1原始背景模型
高斯模型是典型的参数化建模方法,它描述了背景点颜色分布的概率模型,通过不断训练获得参数并且不断更新分布参数,就可以得到较好的背景模型。在本方法中,首先使用输入的视频序列来作为训练样本,建立原始单高斯背景模型。为了减少计算量,把图像分成N×N的网格,在该模型中,t时刻在网格i中的像素组表示为Gi(t),像素数量表示为|Gi(t)|,像素灰度为Ij(t),均值为μi(t),方差为σi(t),模型更新率为αi(t)。随着时间推移,背景图像会发生变化,要对运动目标的背景提取建模,需要对高斯模型中方差和均值两个参数实时更新,更新方式如下:

(1)

(2)
αi(t)=αi(t-1)+1
(3)
(4)
(5)
该方法的优势在于:(1)通过可变的学习率对背景模型进行更新,更好地降低由相机运动造成的配准误差;(2)通过对图像分成N×N的网格,可以显著减少模型的计算量[14]。
2.2.2候选背景模型
(6)
当条件式(6)不成立,并且平均值与候选背景模型的平均值相匹配时有:
(7)
使用Dual-mode SGM(双模单高斯模型)的优势在于,前景像素不会参与原始背景模型的更新过程,因此减少了前景像素对背景模型的干扰。
2.3 检测前景像素
在获得时间t的背景模型后,我们使用t时刻的灰度值与平均值的差值作为判决依据,对于组i中的每个像素j,如果
(8)
则将此像素分类为前景像素,其中θd是阈值参数。前景像素的检测过程中,我们使用首选背景模型来决定前景,从图像中检测出的前景像素即为区域内的运动目标,在本文中,即进入危险区域的工人。
3 实证分析
3.1 工程背景
本文选取某市轨道交通线路上的三个正在进行基坑施工的车站为背景,三个车站均采用明挖法施工,存在施工空间有限、各种工序交叉、技术复杂等特点,并且施工队伍素质不高,施工人员质量安全意识薄弱,操作不规范,施工过程中存在较多的安全隐患。出于对施工安全管理的重视,施工管理人员加强对施工现场的监管力度,每个工地均已安装安全监控摄像头,实时监控工地的安全状况,有效降低重大安全事故的发生风险。但是对于工人进入危险区域的行为缺乏有效监控,由于部分工人缺乏对危险的认识,频繁出现工人在基坑支撑上行走和在施工机械的作业范围内逗留等违规进入危险区域的行为,给施工安全管理带来了极大的阻碍。为了解决人工监控所耗费的人力、物力和财力问题,在三个车站均使用危险区域目标检测方法自动识别工人侵入行为。
3.2 危险区域分析
本文以挖掘机和基坑附近的危险区域为例,通过工地现场摄像头对进入危险区域的人员和机械进行实时监控,获取现场监控视频作为实验样本,本算法采用Miscrosoft Visual Studio 2015 平台结合OpenCV图像处理开发库进行程序编译,选择主频为2.3 GHz的酷睿i5-6300HQ处理器,内存为8 G的笔记本电脑作为实验设备。首先划定出危险区域范围,然后使用本文提出的移动目标检测算法对工人的移动进行自动化连续监测。实验相关参数选择为:网格大小N=4,阈值参数θS=2,用于检测前景像素的阈值参数θd=4,初始方差选择20.0×20.0。
图3是三个正在施工的车站基坑,基坑防护栏杆并未安装完毕。由于工人对危险源的认识不够,工地上出现工人在基坑边缘和钢支撑上行走,以及进入挖掘机工作范围的行为。为了加强基坑周围的人员安全管理,预防高处坠落、坍塌和机械伤害风险,我们首先根据不同风险对应的识别规则划定出危险区域,并且通过利用上述算法所编制的程序在施工监控视频中人为手动框选出要监控的危险区域(如图3中红色边框所示),当工人违规进入红色边框包围内的区域时,程序会发生响应,将移动目标从背景中分离(如图3中被检测出的工人),以此来识别出违规进入危险区域的行为。

图3 人员进入危险区域时自动识别
3.3 评价
为了验证该方法的可行性,在各工地视频监控系统中人工选取共34段10~30 s的工地现场视频,其中20段视频中存在工人走入危险区域的行为,余下14段视频中工人并未进入危险区域,然后运行上述程序,根据程序运行的结果来判断该算法的有效性。视频中发现工人进入危险区域并且程序也识别出入侵行为的视频数量为TP(True Positive),发现工人未进入危险区域并且程序也未识别出入侵行为的视频数量为TN(True Negative),发现工人进入危险区域但程序未识别出入侵行为的视频数量为FP(False Positive),发现工人未进入危险区域但识别出入侵行为的视频数量为FN(False Negative)。采用精确度(Precision)、准确率(Accuracy)、召回率(Recall)三个模式识别中常用的指标对实验结果进行评价:
(9)
(10)
(11)
表2为工人进入危险区域的识别结果,34段视频中共30段视频识别正确,精确度(Precision),准确率(Accuracy)和召回率(Recall)分别达到了94.44%,88.23%,85.00%,三项指标均达到了较高水平,证明本文提出的方法可以较为准确地识别出工人进入危险区域的行为。

表2 实验识别结果
3.4 结果讨论
通过上述实验验证,本方法可以识别出侵入危险区域的行为,但是准确性仍然有待提高,识别失败的情况主要包括误报和目标遗漏。导致识别失败的原因主要有以下几点:
(1)工人身穿衣服的颜色和工地图像背景颜色相近,难以将工人从复杂的背景中识别出来。
(2)由于摄像头安装的距离高度不同,在某些远景图像中,工人尺度小,遗漏目标。
(3)监控区域内已经存在的机械,材料等其他物体的移动也会被该方法识别出,导致误报。
(4)拍摄视频的质量和图像的背景噪声也会影响识别精度。
本文仅使用34段视频来识别危险区域的入侵行为,主要针对基坑、洞口等区域,后续研究将在其他场景验证该方法的有效性。
4 结 语
基于计算机视觉技术的目标检测算法为基坑施工的安全管理提供了有效的帮助,为提高施工过程的信息化水平,减少人工监控视频所耗费的人力、物力、财力,为自动识别危险区域侵入行为提供了一个新的思路。本文结合基坑施工的特点,研究了计算机视觉技术在施工危险区域安全管理中的应用。通过对危险区域进行预先定义划分,将目标检测算法应用到施工过程安全监控中,结合危险区域划分规则和视频目标检测方法,实现了实时监控工人侵入危险区域的目的,可以实时反馈危险区域人员侵入的信息,为侵入行为的矫正和预防提供依据,以求降低危险区域的侵入行为发生率。
猜你喜欢
中国新闻周刊(2023年47期)2024-01-15 12:41:04
艺术家(2023年8期)2023-11-02 02:05:28
小哥白尼(军事科学)(2022年2期)2022-05-25 13:19:30
汽车工程师(2021年12期)2022-01-17 02:29:54
当代陕西(2020年14期)2021-01-08 09:30:42
红领巾·萌芽(2019年8期)2019-08-27 15:30:15
贵州师范学院学报(2016年4期)2016-12-01 03:54:07
CHIP新电脑(2016年3期)2016-03-10 14:22:03
读写算(下)(2015年11期)2015-11-07 07:21:09
中国火炬(2015年11期)2015-07-31 17:28:41