
基于多传感器融合的两栖突击车火力控制算法优化∗
2019-03-01 09:09:40
舰船电子工程 2019年2期
(海军陆战队训练基地 广州 510430)
1 引言
随着高性能的两栖突击车列装海军陆战部队,对两栖突击车的火力攻击的稳定性提出了更高的要求,两栖突击车的火力控制涉及到两栖突击车的车身调整控制、位姿参量控制、弹药装填控制、弹药出管控制以及人机融合控制等各个方面,两栖突击车火力控制的优化设计能提高两栖突击车的生存能力和作战能力,研究两栖突击车火力控制优化方法在海军装备革新和作战效果优化中具有很好的应用价值,相关的控制算法研究受到人们的极大重视[1]。
两栖突击车的火力控制系统是一个非线性动力系统,控制算法的优化过程是对控制参量的优化调整和信息融合过程,采用传感器进行两栖突击车的位姿参量、弹药进出管参量以及攻击相位角等参数的优化采集和信息融合处理[2],结合自适应控制算法实现火力控制系统的优化。典型的控制算法优化模糊PID算法、自适应误差修正算法、非线性反演控制算法等[3~5],上述算法在进行两栖突击车的火力控制中存在非线性失真和模型参数不确定性等问题,导致控制过程的收敛性不好,全局不稳定性效果不佳。针对上述问题,本文提出一种基于多传感器融合和微惯性弹药出管调整的两栖突击车火力控制算法,采用陀螺仪测量仪等敏感传感器元件进行两栖突击车火力攻击姿态数据的信息采集,利用微惯性传感系统读取两栖突击车火力攻击和两栖突击车的车身位姿数据,结合传感器量化融合方法进行火力攻击中的控制约束参量调节和自适应误差补偿,采用卡尔曼滤波处理处理方法进行火力控制中的参数稳定性调节,实现两栖突击车的火力控制算法优化设计,最后通过仿真实验进行性能测试,展示了本文方法进行两栖突击车火力控制中的优越性能。
2 控制约束参量分析和控制对象描述
2.1 控制约束参量分析
为了实现对两栖突击车火力控制优化设计,采用传感器、加速度计以及磁力计等敏感元件进行控制参数采集,采集的两栖突击车的火力控制约束参数有姿态信息、火力攻击位姿信息、角度信息、出管弹药量信息等,在姿态载体运动约束模型下,结合多传感器量化融合和Kalman滤波方法[6],进行火力控制参量调节和信息融合处理,实现两栖突击车火力控制,得到两栖突击车火力控制的总体实现结构如图1所示。
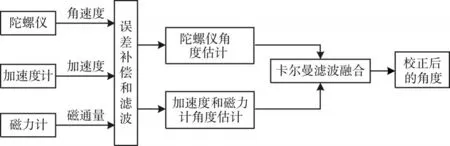
图1 两栖突击车火力控制的总体实现结构图
考虑由N个传感器节点的构建的控制参数采集系统,采用多传感器信息融合方法进行两栖突击车的火力控制优化,构建两栖突击车火力控制的模糊线性动态系统结构模型,采用相应的误差融合方法,得到两栖突击车火力控制问题描述为

其中,x(k)∈Rn×1为两栖突击车的车位状态,A(k)∈Rn×n为状态转移矩阵,两栖突击车火力控制的干扰项w(k)是均值为零且方差为Q(k)的高斯白噪声,Γ(k)为表示传感器数据的采样矩阵。zi(k)∈Rp×1为第i个传感器采集的两栖突击车火力控制的弹药输出测量值,Hi(k)∈Rp×n为相应的测量矩阵,火力控制的模糊约束参量ui(k)∈Rp×1是均值为零且方差为Di(k)的高斯白噪声。结合模糊决策和自适应控制方法[7],对w(k)与ui(k)进行惯性误差修正,得到两栖突击车火力控制的惯性调节函数为

在限定初始状态下,得到误差修正的测量函数x(0)均值为x0,方差为P0,将陀螺仪采集的原始数据进行Kalman滤波处理,得到输出的测量参数独立于w(k)和ui(k),i=1'2'…'N。当两栖突击车处于非加速运动状态时,将加速度和磁力计采集的原始数据作为原始输入参数,进行参量融合和跟踪识别,提高控制输出的稳定性。
2.2 控制对象分析及微惯性传感调节
采用陀螺仪测量仪等敏感传感器元件进行两栖突击车火力攻击姿态数据的信息采集的基础上,进行控制对象分析,利用微惯性传感系统读取两栖突击车火力攻击和两栖突击车的车身位姿数据,使用小扰动理论进行分段控制[8],得到两栖突击车的火力系统倾斜操纵机构的控制系统函数描述为
上式中,Δi(k'r)表示k时刻第i个微惯性传感器的测量值,采用增量调节方法,得到第r个分量的量化步长,r=1'2'…'p。在小扰动的前提下进行火力抖振的误差补偿和反馈调节[9],得到火力控制系统的反馈调节输出为
考虑两栖突击车火力控制模型的非线性,得到火力控制系统微惯性传感调节特性递推公式计算:
结合传感器量化融合方法进行火力攻击中的控制约束参量调节和自适应误差补偿[10],结合模糊控制方法进行两栖突击车的火力控制律优化设计。
3 控制算法优化
在上述采用陀螺仪测量仪等敏感传感器元件进行两栖突击车火力攻击姿态数据的信息采集,利用微惯性传感系统读取两栖突击车火力攻击和两栖突击车的车身位姿调节的基础上,进行火力控制的优化设计。本文提出一种基于多传感器融合和微惯性弹药出管调整的两栖突击车火力控制算法,用卡尔曼滤波处理处理方法进行火力控制中的参数稳定性调节[11],得到火力控制的输出稳态概率密度特征量P(k|k)的信息矩阵为

构建Lyapunov函数进行两栖突击车火力控制的出管误差调节[12],采用反演积分补偿方法,得到两栖突击车火力控制的惯性姿态参量融合信息矩阵为
设计自适应律,采用误差反馈调节方法进行反演控制[13],得到两栖突击车火力控制输出的模型参数为
结合信息状态进行多传感信息融合,根据信息融合结果,进行两栖突击车火力控制的过程优化,得到控制律:
其中,火力控制中的参数稳定性调节向量为

在两栖突击车处于多管火力攻击状态下,火力攻击输出的控制参数经闭环系统后的状态矩阵满足:
当姿态反馈校正时延τk大于一个采样周期时,结合信息状态向量估计值的,得到优化的控制律为
结合Lyapunov稳定性原理,得到本文设计的两栖突击车火力控制算法的稳定收敛的。
4 仿真实验与结果分析
为验证本文的算法在实现两栖突击车火力攻击稳定性控制中的应用性能,进行仿真实验,搭建硬件平台包括三轴陀螺仪L3G4200D、三轴电子罗盘LSM303DLH以及两栖突击车火力集成系统AMS,控制算法采用Matlab 7设计,设置两栖突击车的火力控制传感信息采样周期为0.02s,自适应控制参量调节周期为0.50s,模糊控制的迭代步数分 别 设 定 为 μ=A 5000, μ=A 10000 μ=A 15000,扰动强度设定为-12dB,相关系数选取为 η12=0.6,η23=0.4,η13=0.2,根据上述仿真环境和参数设定,分别采用本文方法和传统方法进行控制性能仿真测试,传统方法分别为PID控制算法、反演控制算法和积分控制算法,分别记为A1,A2和A3,分别测试三种算法进行两栖突击车火力控制的速度和位置控制曲线如图2所示。

图2 三种控制算法对两栖突击车火力控制位置和速度估计曲线
分析图2得知,采用本文方法进行两栖突击车火力控制,对火力攻击点的位置控制精度较好,对两栖突击车的自身速度和火力输出速度的控制跟踪性较好,提高对对敌目标的攻击能力。进一步测试不同方法进行火力控制的误差,得到对比结果如图3所示。
分析图3得知,本文方法进行两栖突击车火力控制,降低了攻击误差,提高了火力攻击的准确性,在攻击目标的初始状态为下进一步测试火力控制性能,得到结果如图4所示。
分析图4得知,在目标位置突变的情况下,采用本文方法进行两栖突击车火力控制,能准确跟踪目标位置和速度,提高了火力攻击的准确性和稳定性,火力控制效能较好。

图3 火力控制的误差估计曲线
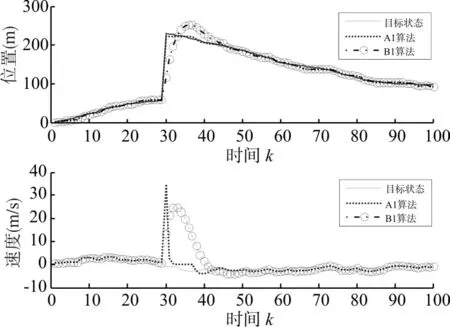
图4 不同算法的控制性能估计曲线
5 结语
研究两栖突击车火力控制优化方法在海军装备革新和作战效果优化中具有很好的应用价值,为了提高两栖突击车的火力攻击稳定性,本文提出一种基于多传感器融合和微惯性弹药出管调整的两栖突击车火力控制算法。采用陀螺仪测量仪等敏感传感器元件进行两栖突击车火力攻击姿态数据的信息采集,利用微惯性传感系统读取两栖突击车火力攻击和两栖突击车的车身位姿数据,结合传感器量化融合方法进行火力攻击中的控制约束参量调节和自适应误差补偿,采用卡尔曼滤波处理方法进行火力控制中的参数稳定性调节,实现控制算法优化设计。研究表明,采用该方法进行两栖突击车火力控制的稳定性较好,两栖突击车的位姿调节能力较强,输出参量误差较小,对目标的火力攻击准确性较好,提高火力控制的品质。
猜你喜欢
当代陕西(2022年1期)2022-03-09 06:12:38
政工学刊(2021年5期)2021-05-18 12:12:30
政工学刊(2021年4期)2021-04-13 06:16:06
房地产导刊(2020年7期)2020-08-24 08:14:12
小学科学(学生版)(2019年11期)2019-12-09 09:06:30
小哥白尼(军事科学)(2019年8期)2019-11-16 09:07:34
火力与指挥控制(2017年3期)2017-04-24 07:58:24
物理实验(2015年9期)2015-02-28 17:36:51
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:32
声学技术(2014年2期)2014-06-21 06:59:14
