基于数据与时码分离存储的遥测时码修正方法研究
2019-02-25 10:02张志国王红萍徐洪洲
兵器装备工程学报 2019年1期
张志国,王红萍,徐洪洲
(91550部队, 辽宁 大连 116023)
某型遥测设备记录遥测信息时分为数据和时码两个信息流分别存储,两种信息之间存在一一对应关系。但在实际任务中,当被测目标处于出水、点火等特征段时,由于受到水裙、火焰的干扰,信号接收质量比较差。在此特征段落时码存在散乱现象,时码和数据的一一对应关系受到影响,具体表现有整秒跳、配时未在遥测数据完整帧对应位置等问题,当多站数据合成全程数据时,造成时码散落段的数据丢失,而此特征段落的数据往往对分析被测目标的技术状态比较重要,特别是当飞行试验出现故障时[1-2]。针对时码修正,GJB2238A—2005遥测数据处理给出了时间检查方法,利用帧周期进行前后两点时间纠错,但此方法只适用于数据与时码同步存储,无法解决在数据与时码分离存储条件下的时码修正。对于多站时统不一致问题,目前国内通用的做法是舍弃时统不一致的数据,不进行时码修正。本文以遥测帧计数为信息参考基准,确定检测模型和修正模型,并分析实测数据验证方法的合理性及有效性。
1 遥测时码修正方法
1.1 异常帧计数修正
以帧计数为参考基准,修正时码的关键是要首先获得准确的遥测帧计数。遥测帧计数是弹上设备产生的,和其他被测参数一起安排在遥测数据帧结构中[3],一般在不同的副帧波道中同时传输两路备保。帧计数由高、低两个字节构成,取值范围为0~65 535,其特点是线性递增的[4]。
在地面遥测设备接收数据时,由于存在干扰情况,接收到的帧计数有可能是错误的[5]。在这种情况下,需要对其进行修正(本文不考虑由于弹上帧计数本身工作异常而造成的帧计数错误,在这种情况下,帧计数是分段连续的,无法实现比对修正)。在一帧数据中帧计数传输两遍,有两个信息源可供相互比较,再利用帧计数本身线性递增的特点,可以实现帧计数的修正。具体方法是:
首先比较两路帧计数的高位,相同的话认为是正确的,如果不同,再和前后两点帧计数的高位比较,由于帧计数高位每隔256个帧周期才向上加1,变化比较缓慢,也就说这三点应存在如下关系:前点帧计数高位≤当前帧计数高位≤后点帧计数高位,通过此关系比较容易得到当前帧计数高位的值。
然后比较两路帧计数的低位,相同的话认为是正确的,如果不同,再和前后两点帧计数的低位比较,前后三点应存在如下关系:前点帧计数低位<当前帧计数低位<后点帧计数低位,同时用三点的时间差和帧计数低位差进行比较,得到帧计数的低位。
异常帧计数修正结构流程图如图1所示。
图1 异常帧计数修正结构流程
1.2 单站时码修正
通过对已有实测遥测时码数据进行处理分析,统计其异常情况,特别是对处于锁定与失锁临界点的数据进行了重点分析,以下两种情况可以进行时码修正[6]:1)数据结构完整,但是帧同步码出现的位置没有在帧长度的整倍数上,此时,时码与数据对应关系不正确;2)数据结构完整,帧同步码出现的位置在帧长度的整倍数上,但是对应的时码错误,满足不了配时精度。针对这两种情况,分别提出了不同的解决方案。
1) 帧同步码未在整帧位置出现的情况
1个帧长的遥测数据块对应16个字节的时码。其中,数据由被测目标产生并发送,时码由遥测接收设备的时码器按帧周期自动生成[7]。但在实际任务中,当遥测接收设备由失锁转为锁定状态时,完整帧结构的帧同步码没有出现在帧长的整倍数上,造成时码和数据的一一对应关系受到影响。
遥测设备接收数据时是逐帧存储,当其处于失锁状态时也向数据文件写入,只是帧结构是紊乱的。通过对大量实测遥测数据进行分析,确定在此状态下数据和时码存在如下关系:设n=当前帧同步码位置/帧长,则其对应的时码必为Tn-1、Tn、Tn+1中的一个。这样就把帧同步码未在整帧位置出现的情况转化为帧同步码在整帧位置出现的情况,只不过其对应的时码有可能有三组,再根据帧计数进行选取或者修正。
2) 帧同步码位置正确、时码异常的情况
首先,对帧计数进行修正,得到正确的帧计数,再将BCD时码转换成相对时。以数据质量好的一段所对应的时间为基准,对与帧计数对应的所有时间源码进行前向修正及后向修正;每修好一个时间,即以该时间为基准继续修正;并根据“|时间差|<时间误差范围”判断修正结果是否达到要求[8]。单站时码修正结构流程图如图2所示。
图2 单站时码修正结构流程
1.3 多站时统不一致修正
当多站数据合成全程数据时,如果某站时统和其他站时统不一致,会造成该站数据无法合入到全程数据中去,实现不了全程拼接[9,10]。因此,必须对该站时码进行修正。
首先,对该站数据进行帧计数修正、单站时码修正,保证其相对时是正确的;然后,与其他站相同帧计数的时码进行比较,计算时间差;将该站所有时码加上时间差,得到修正后的时码。
多站时统不一致修正结构流程图如图3所示。
2 算例与分析
某次飞行试验,遥测帧周期为8 ms,在580~680 s段落,遥测误码率较高,数据接收质量较差。原始帧计数如图4所示,存在大量的毛刺野值,经过异常帧计数修正后如图5所示,曲线光滑无毛刺,异常帧计数得到了修正,时码修正前与帧计数时间差如图6所示,存在最大约15 ms的多个异常时码,时码修正后与帧计数时间差如图7所示,所有时间差不超过0.8 ms,满足了数据处理精度要求。同时,通过修正帧同步码未在整帧位置出现的情况,数据向前多处理26个点,共计208 ms,提高了遥测数据处理完整性。

图3 多站时统不一致修正结构流程
图4 帧计数修正前
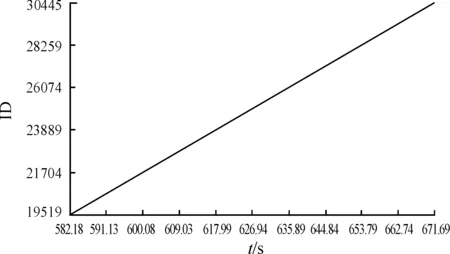
图5 帧计数修正后
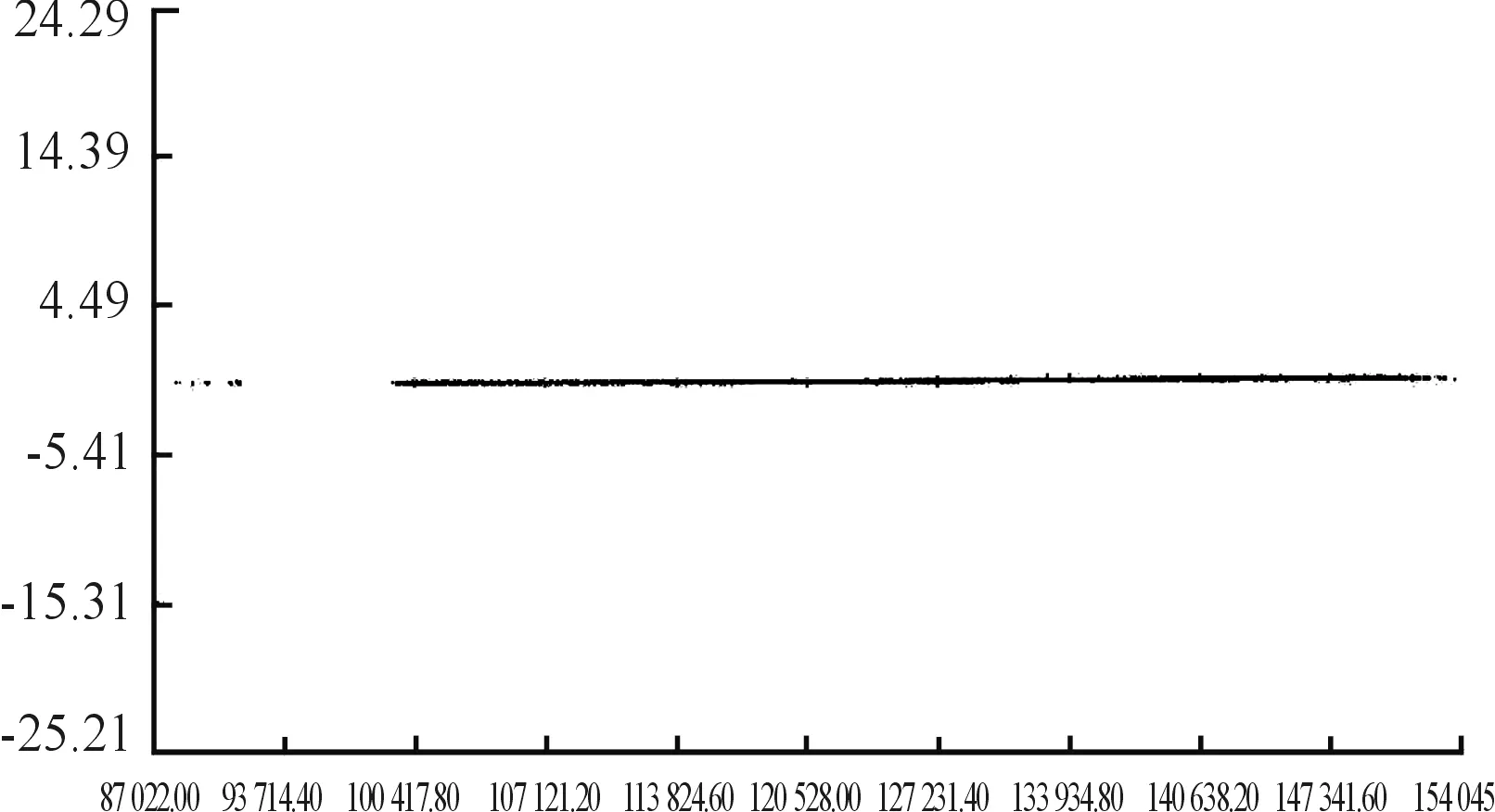
图6 时码修正前与帧计数的时间差
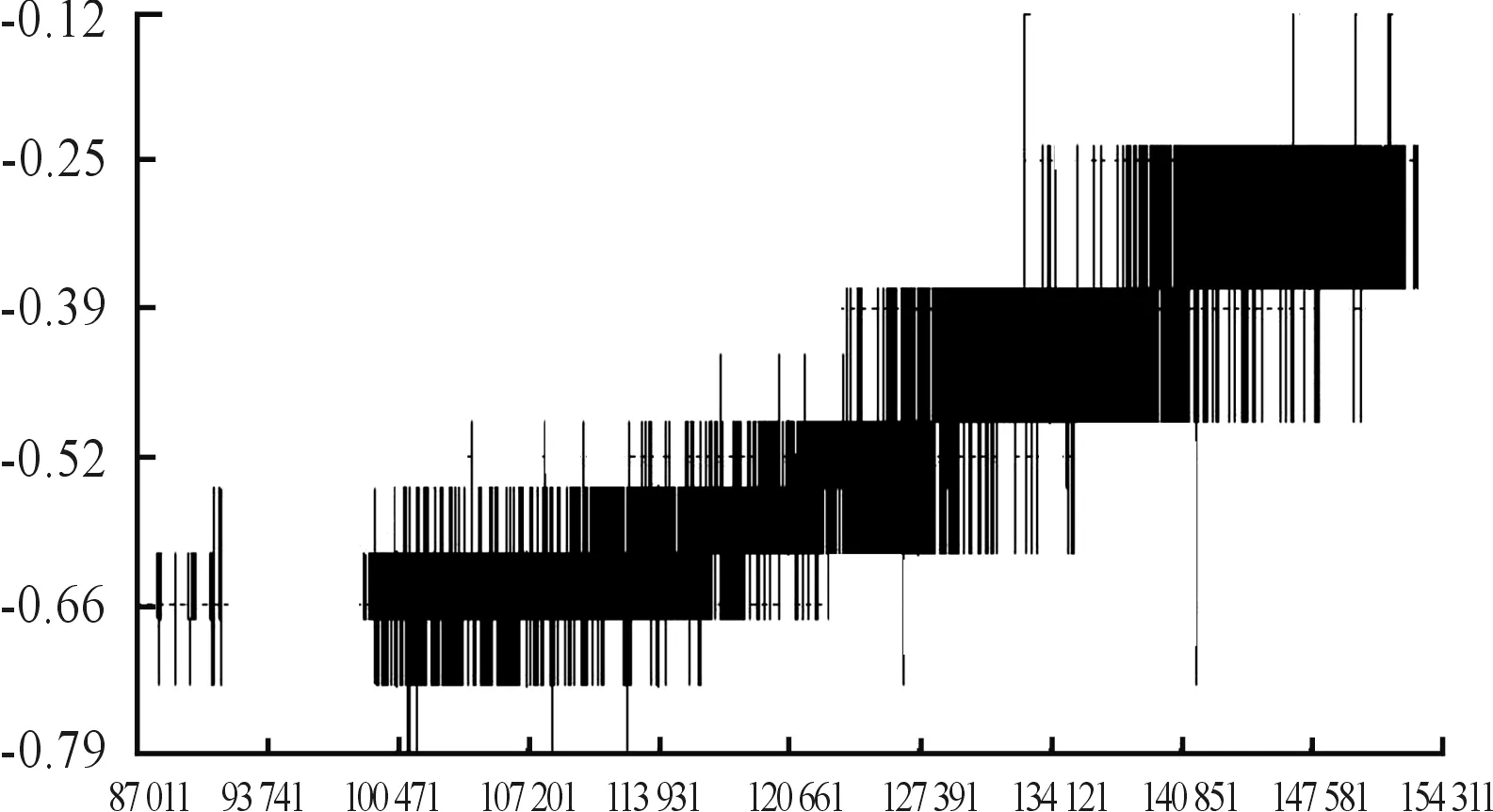
图7 时码修正后与帧计数的时间差
3 结论
基于数据与时码分离存储的遥测时码修正方法,以遥测帧计数为信息参考基准,首先进行异常帧计数修正,然后进行单站时码修正,最后进行多站时统不一致修正。该方法无需考虑遥测设备的更新换代,具有很强的通用性。实测数据表明,该方法解决了异常时码对数据配时的影响,增加了特征时刻遥测数据可用量,可用于遥测数据事后处理。
猜你喜欢
承德医学院学报(2022年2期)2022-05-23
载人航天(2021年5期)2021-11-20
云南医药(2021年3期)2021-07-21
北京航空航天大学学报(2020年10期)2020-11-14
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
民用飞机设计与研究(2019年2期)2019-08-05
电子制作(2019年11期)2019-07-04
山东工业技术(2017年23期)2017-11-28
演艺科技(2017年8期)2017-09-25