船舶轴带BDFG并网控制及其锁相环
2019-02-24 05:30高国章
中国航海 2019年4期
高国章, 张 帆, 高 岚
(武汉理工大学 能源与动力工程学院, 武汉 430063)
随着节能减排成为目前航运业的重要目标之一,各大造船企业和船舶科研单位都在研究船舶节能和提高经济性的方法。轴带发电机利用船舶主机的冗余功率为船舶提供一部分的电力,这已成为当前船舶电站节能最重要的方式。[1]无刷双馈发电机(Brushless Doubly-Fed Generator, BDFG)相较于传统的有刷电机取消了电刷和滑环等装置,使其具有结构简单、运行安全可靠等优点,目前其主要应用于变频调速、风力发电和船舶发电等领域中,也是现今船舶轴带发电系统主要的研究方向之一。
针对BDFG的研究,文献[2]对目前国内BDFG的发展历程、定转子结构、数学模型、控制策略及发展与应用前景进行整体概述。目前,对于BDFG的控制主要分为独立发电控制与并网控制。BDFG作为独立发电系统时,已有大多数学者对其控制策略进行深入研究。文献[3]对船舶轴带双馈独立发电系统的控制进行仿真分析,结果表明其独立运行时,BDFG电机具有良好的电压跟随性和频率稳定性。文献[4]提出一种BDFG独立发电系统的励磁控制策略,并对其进行具体的试验验证,结果表明BDFG在原动机转速变化时,仍能保持稳定的输出电压和频率。
BDFG并网控制的研究多在于风力发电场合与船舶轴带发电系统中。由于风力发电机的特殊性,发电机一般处于长期并网运行状态,发电机输出电压受到电网电压钳制[5],其控制目标多是以抑制电压谐波于振荡[6-7],控制电机的最大输出功率为主。文献[8]提出一种模型预测直接功率控制的方法,该方法能够快速地实现并网双馈风机的有功、无功功率的控制。对于船舶轴带发电系统而言,由于其特殊的工作环境,需经常对轴带发电机与船舶电网进行并网操作。目前,对于传统的同步发电机的并网控制已有较多的研究。文献[9]针对船舶轴带发电系统独网与并网控制两种控制模式提出可实现平滑切换的控制方法,并对其进行试验验证。文献[10]基于船舶轴带无刷双馈电机独立发电系统提出一种矢量控制与模糊比例-微分-积分(Proportional Integral Differential,PID)控制器相结合的控制方法,以此来实现对BDFG独立运行的控制。文献[11]提出BDFG在独立发电和并网发电模式下的控制策略,但主要针对独立发电模式下的控制,并未对并网进行深入研究。文献[12]针对BDFG的优势,提出将其运用于船舶轴带发电系统中,并提出基于BDFG的独立发电和并网发电两种运行方式的控制方法。
但是,目前基于轴带BDFG并网控制的研究较少且大多数是对于风力发电系统的研究。因此,本文根据船舶轴带发电机并网的条件,采用电压矢量控制的方法对无刷双馈电机发电电压与频率进行控制以达到与电网电压一致。同时,利用并网锁相环对电网相位进行跟踪进而控制发电机电压相位与电网相位一致,实现轴带BDFG并网控制。并用MATLAB/Simulink进行建模仿真,试验结果表明该控制方法的可行性,具有一定的理论意义。
1 BDFG的运行原理与数学模型
1.1 BDFG运行原理
随着BDFG研究不断发展和完善,BDFG在传统交流发电机的基础上取消电刷和滑环等装置,同时在结构上定子绕组采用两对极对数不同的定子绕组,即控制绕组与功率绕组。控制绕组通过可双向流动的脉冲宽度调制(Pulse Width Modulation, PWM)变频器与电网连接,并输入频率为fc的控制电流,功率绕组直接与电网连接并向电网输送频率fp的电流。根据文献 [13]可得,BDFG的转速计算式为

(1)
式(1)中:fp、fc分别为功率绕组与控制绕组的电流频率;pp、pc为功率绕组与控制绕组的极对数。当无刷双馈发电机处于超同步速时取“+”,处于亚同步速时取“-”。
在船舶运行中,由于海况及航线的变化,船舶主机的转速也会发生变化,从而导致无刷双馈发电机的转速nr改变引起发电频率发生改变。但是,在无刷双馈发电机发电并网过程中需保持功率绕组电流fp不变。功率绕组电流频率的公式可由式(1)推导为
(2)
式(2)中:由于功率绕组需要与电网相连,需保持频率恒定且与电网一致。当主机转速变化时,可通过改变控制绕组电流频率fc来保持fp的稳定,以达到变速恒频发电的目的。
1.2 BDFG数学模型
由于BDFG复杂的内部结构和电磁关系,其数学模型相比于同步发电机更为复杂。以采用转子速d-q坐标系下的BDFG数学模型[14]为
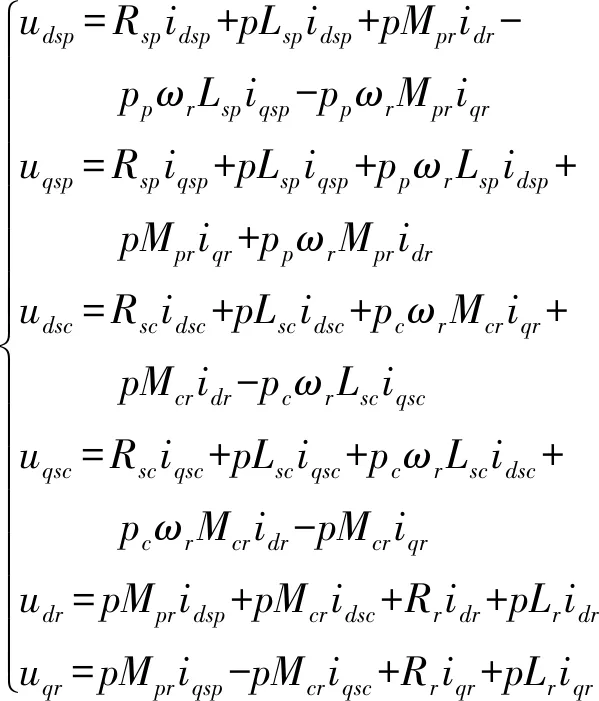
(3)
磁链方程为
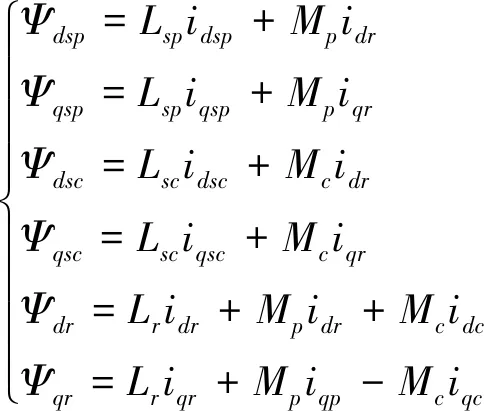
(4)
电磁转矩方程为
Tem=ppLsp(iqpidr-idpiqr)+
pcLsc(iqcidr-idciqr)
(5)
式(3)~式(5)中:下标d和q分别为在Odq坐标系下的d轴与q轴的分量;下标s和r分别为定子侧与转子侧;下标p和c为定子控制绕组与功率绕组;p为微分算子;pp、pc为功率绕组与控制绕组的极对数;udsp、uqsp、udsc、uqsc、udr、uqr分别为BDFG在旋转坐标系下定转子绕组对应的相电压值;idp、iqp、idc、iqc、idr、iqr为电流值;Rsp、Rsc、Rr分别为定转子各绕组的电阻值;Lsp、Lsc、Lr分别为定转子各绕组的自感;Mpr、Mcr分别为功率绕组、控制绕组与转子绕组之间的互感;Ψ为电压磁链。
2 轴带BDFG并网控制
2.1 BDFG并网发电系统组成
船舶轴带无刷双馈发电机并网发电系统主要分为船舶主机、轴带无刷双馈发电机及船舶负载等3个部分,其拓扑结构见图1。

图1 并网系统拓扑结构
船舶主机稳定运行后通过齿轮箱带动轴带BDFG转动,BDFG定子绕组中功率绕组末端直接与船舶电网通过一个合闸开关相连,控制绕组一端通过一个双向流动的双PWM变频器及滤波器与船舶电网相连。轴带BDFG启动时,由双PWM之间的交流输入经不可控整流提供启动时所需的励磁电流以保证BDFG正常启动,待BDFG稳定运行且功率绕组端向电网供电后,控制绕组端的励磁电流便由电网端经过双PWM变频器整流逆变后提供,以保证轴带BDFG正常运行。
使用轴带BDFG的最终目的是与船舶电网并网运行以节省柴油发电机的消耗。但是,轴带BDFG并入电网将会对船舶电网产生冲击使得电力系统的稳定性降低。因此,并网过程中必须控制BDFG功率绕组输出电压的幅值、频率及相位与电网一致。根据BDFG的特点,分别对其电压的幅频及相位进行控制。
2.2 BDFG电压幅频控制
BDFG发电并网前是空载运行的,对其控制也可看作是对独立运行时变速恒频发电的控制。根据BDFG的原理,结合定子电压矢量控制的方法,以电网电压的频率与幅值为基准,通过对控制绕组的励磁电流的控制即可控制功率绕组输出电压的频率与幅值,得到控制原理框图见图2。
根据文献[15]可知BDFG功率绕组输出的瞬时有功功率与无功功率的表达式为

图2 控制原理框图
(6)
在BDFG的旋转Odq坐标系下,定义功率绕组磁链与d轴同方向,d轴落后于q轴90°,根据控制目标令功率绕组的目标值与电网电压一致,则控制绕组电压的矢量值为us,则存在的电压关系为

(7)

(8)
则式(6)可化简为

(9)


(10)

(11)

(12)

(13)
上述只是对BDFG功率绕组输出电压的幅值与频率进行控制,但是由于发电机并网时还需要求电压相位与电网一致,才能够使BDFG顺利并入船舶电网,因此,还需对BDFG功率绕组输出电压的相位进行控制。
2.3 BDFG电压相位控制
在并网过程中,锁相环就是通过监测电网电压来保证逆变器输出的电压的相位及频率与电网保持一致的闭环控制系统。[16]对于电压的相位控制引入一个锁相环来监测船舶电网电压以保证BDFG功率绕组输出电压相位与其一致。
锁相环的基本工作原理矢量图见图3,将三相电压ua、ub、uc转换到静止Oαβ坐标系下,再由静止的αβ坐标系转换到同步旋转的Odq坐标系下。其中α轴与a轴重合,电压矢量u与α轴的夹角为θ,静止的Oαβ坐标系以一定的速度旋转后便形成旋转Odq坐标系,Oαβ坐标系与旋转Odq坐标系的夹角为θ*。其锁相环控制框图见图4。

图3 坐标变换矢量图
锁相环将监测到的船舶电网三相电压ua、ub、uc通过坐标变换后得到同步旋转Odq坐标系下的电压值ud、uq如图4所示。然后由PI控制器对uq进行调节使其迅速达到零。ω0的给定值为电网电压的标准值50 Hz,再经过一个积分环节得到电网电压的相位θ*。根据电网电压相位对BDFG控制绕组电流进行控制,使其迅速地靠近电网电压相位,达到并网条件。根据电机转速、控制绕组与功率绕组的关系式

图4 锁相环控制框图
(14)
得到相位控制框图见图5。由图5可知
ussin(Δθ)=usΔθ=uq
(15)
(16)


图5 相位控制框图
3 仿真分析
为验证本文针对BDFG并网所提出的控制方法的可行性,根据所建立的BDFG数学模型及控制方法,在MATLAB/Simulink仿真环境中搭建船舶轴带BDFG并网控制的仿真模型。其中电机采用2/4极对数64 kW的BDFG,其转动惯量为0.03 kg/m2。所选取的BDFG主要仿真参数设定见表1。然后对传统标量控制和所提出的定子电压矢量控制分别进

表1 BDFG仿真参数设定
行仿真试验,并在转速突变的条件下进行试验验证,最后对轴带BDFG进行并网试验。
3.1 BDFG发电仿真分析
3.1.1标量控制仿真
为验证控制方法的优势,首先在Simulink搭建标量控制的仿真模型并进行仿真试验,所得到的BDFG输出电压曲线见图6。

a)BDFG功率绕组输出电压曲线

b)BDFG电压频率曲线图6 标量控制仿真结果
由图6可知:图6a中BDFG功率绕组输出的电压从建立起一直在280~320 V内波动,且不稳定;图6b中所示的由锁相环所检测到的电压频率也一直在50 Hz上下波动且波动范围较大,不能满足船用电的要求,且不能满足与船舶电网并网的要求。
3.1.2定子电压矢量控制仿真
根据上述分析,在MATLAB/Simulink中建立BDFG锁相环的仿真模型和定子电压矢量控制仿真模型。首先对电网电压平衡时进行监测,电网线电压的有效值为311 V,频率为50 Hz。仿真结果见图7,图7a、7c、7e分别为电网电压的幅值相位和频率,图7b、7d、7f分别对应为矢量控制下BDFG输出的电压的幅值相位以及频率。由图7可知:在电网稳定的情况下,锁相环能够准确地监测到电网电压频率与相位,并且定子电压矢量控制方法稳定。

a)电网电压曲线

b)BDFG电压曲线

c)电网电压频率曲线

d)BDFG电压频率曲线

e)电网电压相位

f)BDFG电压相位曲线图7 矢量控制电网电压仿真结果
3.2 BDFG转速突变仿真
由于轴带BDFG的转速受船舶主机转速的变化影响,所以,BDFG在发电稳定后需在主机转速变化时能够迅速稳定功率绕组的输出电压。因此,仿真设置在功率绕组的有效线电压和频率分别为311 V和 50 Hz,设定其初始稳定转速为300 r/min。BDFG稳定后的功率绕组输出电压曲线见图8。
BDFG转速在2.0 s时由300 r/min突变至400 r/min。功率绕组输出的A相电压幅值和电压频率的仿真结果见图9。DBFG在约0.5 s电压的幅值与频率趋于稳定并一直保持。在2.0 s转速突变时,由9a和9b可知,BDFG功率绕组输出电压出现约5 V的小幅度波动;由9c可知,电压的频率也出现小幅度的波动,但波动在允许的范围内,经过约0.1 s后又恢复为稳定值。并且相位基本保持不变,由此说明对于BDFG的控制比较稳定。从图9e所示的控制绕组电流信号的幅值可看出在转速突变时,电流幅值基本保持稳定,但其频率迅速变化以此来保持功率绕组输出电压的频率迅速保持稳定,其变化也满足式(1)中的函数关系式。
3.3 BDFG并网仿真分析
根据上述分析,BDFG在稳定发电状态下和转速突变的情况下,功率绕组输出电压的幅值频率与相位都能够与电网保持同步,在其达到并网的条件后,进行轴带BDFG与船舶电网并网的仿真试验。
BDFG并网仿真曲线见图10,虚线为BDFG A相电压,实线为船舶电网A相电压。当BDFG功率绕组电压频率和幅值与电网一致时,相位不断接近电网相位。在1.5 s时发出并网信号,电机电压相位不断接近电网相位。在约2.0 s电压相位实现同步,轴带无刷双馈成功并入船舶电网,且能够迅速稳定。由此可知所提出的BDFG幅频以及相位控制方法具有可行性。

a)功率绕组输出电压

b)功率绕组输出电压局部放大
图8 BDFG功率绕组输出电压仿真结果

a)功率绕组输出三相电压

b)功率绕组输出A相电压
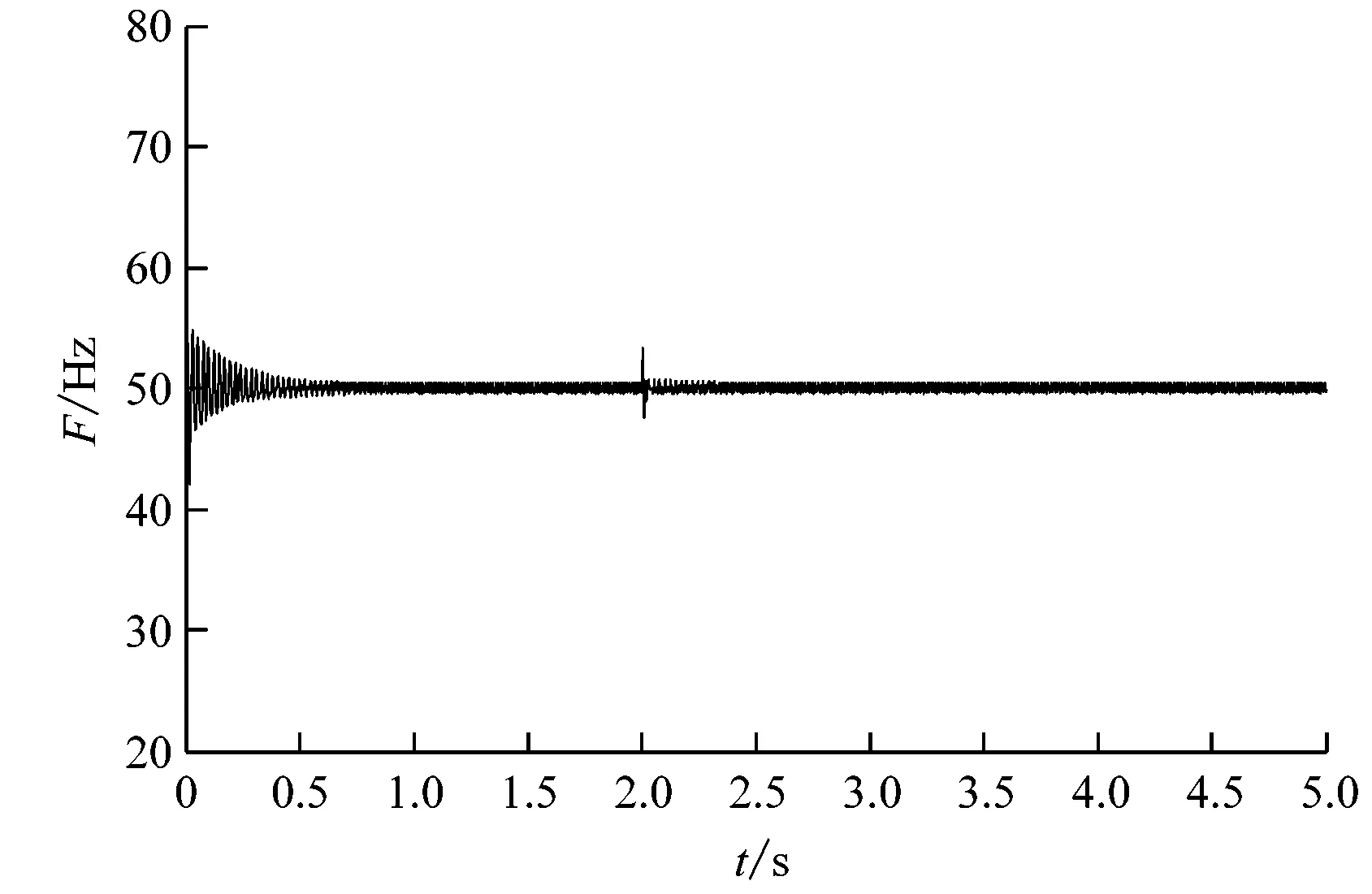
c)功率绕组输出电压频率

d)功率绕组输出电压相位

e)控制绕组电流值图9 转速突变仿真结果

图10 BDFG并网仿真曲线
4 结束语
基于BDFG的优点,将其运用于船舶轴带发电系统,并与船舶电网并网为船舶提供电能。根据轴带发电机并网所需的条件,提出定子绕组矢量控制来控制BDFG功率绕组输出电压的幅值与频率;利用并网锁相环的优点实时监测电网相位,并对发电机的相位进行控制以达到与电网同步。在Simulink环境中进行仿真试验来验证该控制方法的可行性。仿真结果表明:该方法可完成轴带BDFG的发电和与船舶并网运行的控制。
猜你喜欢
装备维修技术(2022年7期)2022-07-01
防爆电机(2022年1期)2022-02-16
故事作文·高年级(2021年12期)2021-12-21
少男少女·小作家(2021年8期)2021-09-13
红领巾·探索(2020年2期)2020-05-19
中国新技术新产品(2018年22期)2018-01-05
筑路机械与施工机械化(2016年12期)2017-01-13
军事文摘·科学少年(2016年8期)2016-11-02
农机使用与维修(2014年1期)2014-09-23