船舶电气系统保护单元可靠性预计的修正方法
2019-02-24 05:29吴志良姚玉斌
中国航海 2019年4期
吴志良, 李 能, 姚玉斌, 王 丹
(大连海事大学 船舶电气工程学院, 辽宁 大连 116026)
系统可靠性预计是一种预测过程,通过对系统已掌握的数据、资料等信息的研究来预测系统所能达到的可靠度或可靠性特征量。[1-2]系统可靠性预计是提高系统可靠度的重要措施之一,其技术一直备受国内外广大科研人员广泛关注,并对此开展大量的相关研究工作。
为更好地研究有关可靠性预计技术的新方法、新理论,美国电气和电子工程师协会(Institute of Electrical and Electronics Engineer, IEEE)成立专门的可靠性预计委员会。目前,系统可靠性预计的方法主要有元器件计数法、应力分析法、系统上下限法、相似产品法等。文献[3]对可靠性预计的发展史、可靠性预计的方法进行总结,并对常用的两类重要的可靠性预计方法分别详细地进行比较和分析研究。文献[4]综述国外最新可靠性预计方法。文献[5]对最新失效率预测模型进行比较和评价。文献[6]对舰船总体任务的可靠性分配进行研究。文献[7]对提高智能电能表可靠性的相关方案进行总结。文献[8]完成绝缘栅双极型晶体管(Insulated Gate Bipolar Transistor,IGBT)可靠性预计模型建立,为国产元器件工程应用过程中的可靠性定量分析提供技术参考。文献[9]针对舰船装备复杂系统,开展多状态系统的可靠性建模,为可靠性评估提供技术借鉴。
许多国家相继制定可靠性预计技术的标准文件。文献[10]是美国军用规范的电子设备可靠性预计标准手册,也是目前世界各国广泛参考使用的可靠性预计标准手册。文献[11]是我国电子设备可靠性预计标准手册。
元器件计数法是将组成系统的所有元器件按照可靠性串联模型进行可靠性建模,这种处理系统的方法虽然简化可靠性建模的繁重工作,但并未考虑组成系统各单元、元器件的特殊性,使元器件记数法预计系统总失效率的预计结果往往偏大,其系统可靠度的预计结果往往偏小。因此,采用元器件计数法预计系统可靠性特征量的误差较大,可靠性特征量预计结果的可信度相对较低,这不仅是元器件计数法预计系统可靠性特征量的不足,也是可靠性预计标准手册至今尚未解决的实际问题。为解决这一问题,本文在充分研究、分析船舶电气系统保护单元特点的基础上提出一种误动系数法修正传统元器件计数法的修正方法,对进一步深入开展船舶电气系统可靠性预计以及相关的可靠性建模工作提供有力的支撑。
1 保护单元的特点
当电气系统发生故障时,其保护单元应该能够切除故障点,以保护电气系统恢复到正常工作状态。这样才能够说明电气系统的保护单元进行正确的保护动作,实现自身的保护功能。
如果电气系统发生故障时,其保护单元本来应该正常动作,但由于其自身故障而未正常动作,则定义该保护单元发生“拒动”故障。
如果电气系统本身工作正常,但其保护单元由于自身的原因(如自身发生故障)而错误地动作导致电气系统工作状态发生改变,则定义该保护单元发生“误动”故障。
由于电气系统保护单元发生“拒动”故障时,电气系统也已发生故障,所以“拒动”故障仅影响电气系统的安全性,并不影响电气系统的可靠性。只有当电气系统保护单元发生“误动”故障时,“误动”故障才导致电气系统增加一次故障,这样肯定影响电气系统的可靠性。因此,针对电气系统保护单元进行可靠性预计时,要针对具体问题具体分析,在对系统工作原理全面分析的基础上,确定出哪些是仅影响系统安全性的拒动因素,哪些是影响系统可靠性的误动因素,采用误动系数法修正传统元器件计数法的通用数学模型,更加科学地预计出电气系统保护单元的可靠性特征量。[12]
2 保护单元可靠性预计数学模型
2.1 预计保护单元可靠性的元器件计数法
文献[10]给出的元器件计数法通用数学模型为

(1)

(2)
Rs(t)=exp(-λst)
(3)
式(1)~式(3)中:λs为系统总的失效率;tMTBF为系统平均无故障工作时间;Rs为系统总的可靠度;n为不同的通用元器件的种类数;λQi为第i种通用元器件的质量系数;Ni为第i种通用元器件的数量;λGi为第i种通用元器件的通用失效率。
2.2 预计保护单元可靠性的误动系数法
为获得最合理的失效率数据,充分考虑到电气系统保护单元的特点,应用误动系数法修正传统元器件计数法的通用数学模型式(1)~式(3),修正后的数学模型为
(4)
(5)
Rs(t)=exp(-λst)
(6)
λ误动=βλG
(7)
式(4)~式(7)中:βi为第i种通用元器件的误动系数;λ误动为电气系统保护单元误动失效率。
电气系统通用元器件的误动系数有3种形式:
1)β=1(电气系统非保护单元的元器件)。
2)β=0(电气系统保护单元拒动失效模式下的元器件)。
3)β=α(电气系统保护单元误动失效模式下的元器件)。
α是某种元器件在不同失效模式下的相对频率,所用到的部分元器件α值见表1。表1中:元器件的误动失效率λ误动等于该元器件的通用失效率λG乘以该元器件误动失效模式所占的百分比数(相对频率α(%))。通常α表示某种元器件的失效模式在元器件总失效模式中所占的百分比数,很显然,一个元器件在所有失效模式下的相对频率α值之和等于1。
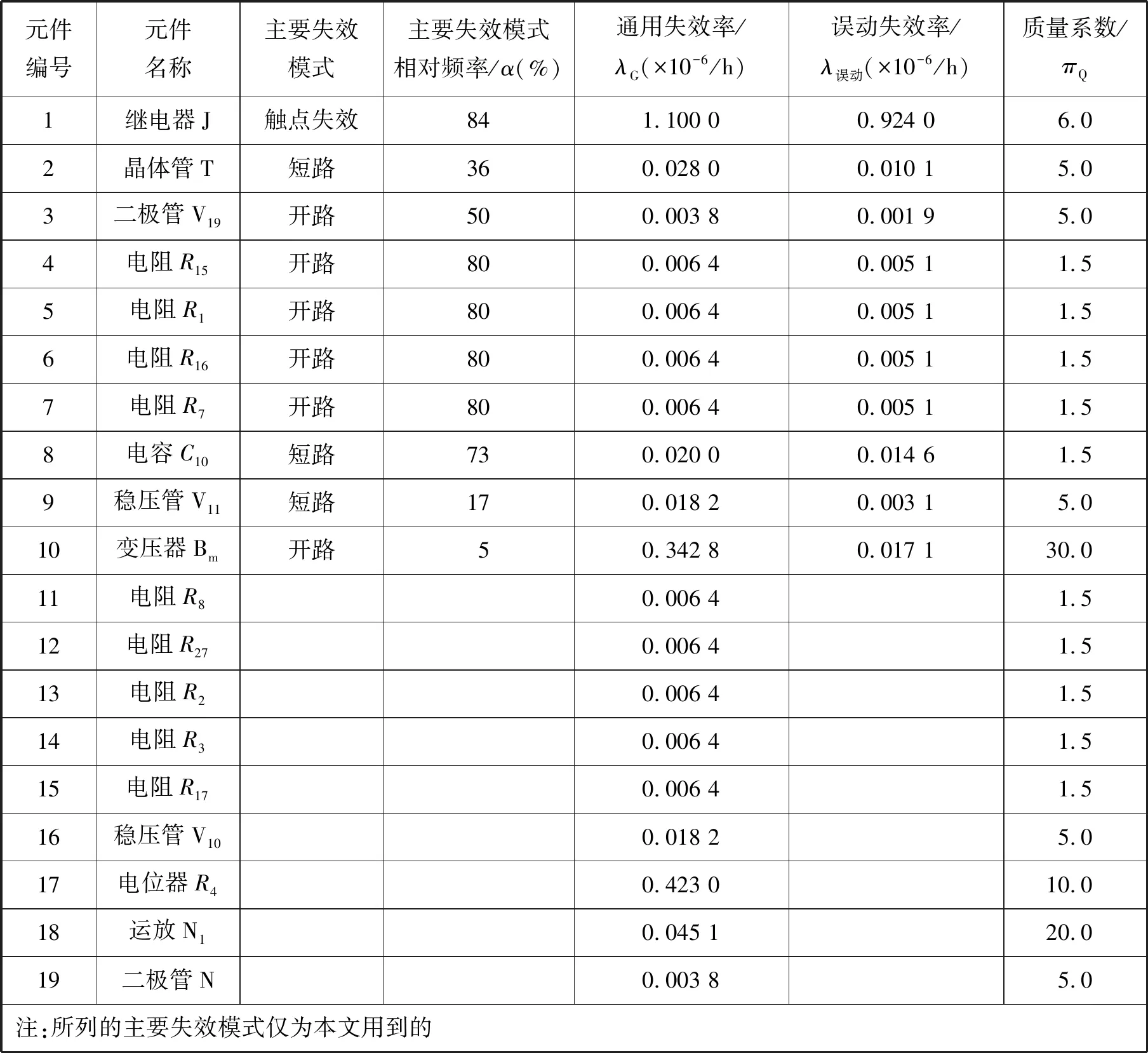
表1 误动失效率计算
3 应用算例
3.1 负压保护单元
船舶电站自动控制分系统SDA-22欠压保护单元控制原理图见图1。[12-13]

图1 欠压保护单元
船舶电站自动控制分系统SDA-22欠压保护单元的作用是:当船舶电力系统发生欠压故障时,船舶电站综合保护系统经延时确认后控制船舶发电机主开关跳闸,以保护船舶发电机。
对于船舶发电机欠压保护的整定,我国《钢质海船入级规范2012》规定:
1)用于避免发电机不发电时闭合断路器应瞬时动作。
2)当电压降低至额定电压的70%~35%时,应经系统选择性保护要求的延时后动作。
船舶电站的电压参数经降压、分压、整流、滤波后形成检测电压信号VIN,其经电阻R1接入运算放大器N1的反相端。经检测电压信号VIN与船舶电站电压参数成正比。当船舶电站的电压参数正常时,检测电压信号VIN的电平高于运算放大器N1的同相端给定信号电平,输出电压信号Vout为高电平,继电器J失电,其辅助触点未发出欠压保护信号。当船舶电站发生欠压故障时,检测电压信号VIN电平低于运算放大器N1的同相端给定信号电平,输出电压信号Vout为低电平,继电器J则处于得电动作状态,其辅助触点发出欠压保护信号。
综上所述,如果船舶电站电网电压发生欠压故障,输入电压信号VIN为低电平,而输出电压信号Vout却为高电平,继电器J释放而未动作,这种情况说明保护单元发生“拒动”故障。
从船舶电站系统功能的角度分析,如果发生“拒动”故障,必将引起船舶发电机电流等参数出现大幅度波动,船舶电站综合保护系统将进行相应的保护,本文仅限于讨论船舶电站自动控制分系统SDA-22欠压保护单元的可靠性。
如果船舶电站电压参数运行正常,但是继电器J的辅助触点发出欠压保护信号,造成船舶电站运行状态发生改变,这种现象表明:船舶电站欠压保护单元发生“误动”故障。
(1)造成保护单元发生“误动”故障的主要原因有:晶体管T发生短路失效;继电器J辅助触点失效;运算放大器N1输出为高电平信号。
(2)造成运算放大器N1输出为高电平信号的主要原因有:电阻R15、R1发生开路失效;输入电压信号VIN为低电平。
(3)造成输入电压信号VIN为低电平的主要原因有:电容C10发生短路失效;电阻R16、R7发生开路失效;二极管V19发生开路失效;稳压管V11发生短路失效;变压器Bm发生开路失效。
继电器J辅助触点失效、晶体管T短路失效、电阻R15、R1开路失效、电容C10短路失效、电阻R16、R7开路失效、二极管V19开路失效、稳压管V11短路失效、变压器Bm开路失效共10种元器件失效模式造成欠压保护单元发生“误动”故障。
船舶电站自动控制分系统SDA-22欠压保护单元中的元器件通用失效率、各主要失效模式相对频率α(%)以及误动失效率的计算如表1所示。
3.2 元器件计数法预计保护单元的可靠性
共有19个通用元器件按照可靠性串联模型组成船舶电站欠压保护单元可靠性模型。按照一般元器件记数方法对保护单元的可靠性进行预计,船舶电站欠压保护单元各个可靠性特征量预计结果为

22.492 4×10-6/h
(8)
Rs(t)=exp(-λst)
(9)
(10)
3.3 误动系数法修正保护单元可靠性预计
考虑到电气系统欠压保护单元的特点,采用误动系数法修正传统元器件计数法的通用数学模型,即用保护单元的误动失效率λ误动代替其通用失效率λG。这样,船舶电站欠压保护单元各个可靠性特征量的预计结果为

(11)
(13)
由式(11)~式(13)可知:采用误动系数法修正传统元器件计数法的通用数学模型,以元器件的误动失效率替代元器件的通用失效率,船舶电气系统保护单元的失效率仅为常规计数法预计结果的27.5%,船舶电气系统保护单元平均无故障工作时间约提高到常规计数法预计结果的4倍。
4 结束语
针对船舶电气系统保护单元的特点,采用误动系数法修正传统元器件计数法通用数学模型,这种修正方法其结果更合理、更精确,为深入研究船舶电站可靠性建模工作提供更加有力的支撑。
猜你喜欢
军民两用技术与产品(2022年7期)2022-08-06
北京航空航天大学学报(2022年6期)2022-07-02
能源工程(2022年2期)2022-05-23
航天工业管理(2022年4期)2022-05-21
汽车实用技术(2022年4期)2022-03-07
建材发展导向(2021年15期)2021-11-05
现代仪器与医疗(2021年1期)2021-06-09
航天工业管理(2021年4期)2021-05-19
汽车维修与保养(2020年11期)2020-11-23
现代电子技术(2009年8期)2009-06-25