
康复用下肢外骨骼结构设计与仿真
2019-02-23 05:25:28张峻霞张遵浩苏子懿苏海龙
天津科技大学学报 2019年1期
张峻霞,李 威,张遵浩,苏子懿,苏海龙
(天津市轻工与食品工程机械装备集成设计与在线监控重点实验室,天津科技大学机械工程学院,天津 300222)
康复用下肢外骨骼是一种辅助病人站立、行走的双足装置[1].在国内外对外骨骼的研究中,Rewalk Robotics公司设计制造的外骨骼用于帮助截瘫患者实现独立行走,工作原理是外骨骼通过检测患者重心的变化,利用电机的旋转运动带动装置的髋关节和膝关节运动.但是此款外骨骼不能实现无级可调,且价格比较昂贵[2].新西兰 Rex Bionics公司研制的外骨骼能支撑残障患者的身体,帮助他们重新站起来.但是装置的质量高达 38 kg,行走姿势更像是在地面上滑行而不是真正的着地步行[3].总结国内外几款典型的外骨骼,均存在以下关键技术问题:外骨骼与人体的协调性较差;外骨骼整机质量普遍过重导致使用不便[4–5].
本文在分析人体下肢运动机理的基础上设计了一款外骨骼.通过使用碳纤维和航空铝材料大大减轻了装置质量,使用无级可调机构提高了人机协调性.该装置既可以作为截瘫患者的代步工具,也可以作为脑卒中患者康复训练的器具.
1 人体下肢运动机理
人行走主要是由下肢髋关节、膝关节和踝关节的运动实现的,其运动器官由骨骼肌、肌腱、关节共同组成.通过附着在骨骼上的骨骼肌的收缩舒张运动,带动相关骨骼和关节运动,完成行走过程[6].此过程类似于机械原理中的四连杆运动,将人体骨骼肌带动关节运动与四连杆运动进行类比,如图1所示.
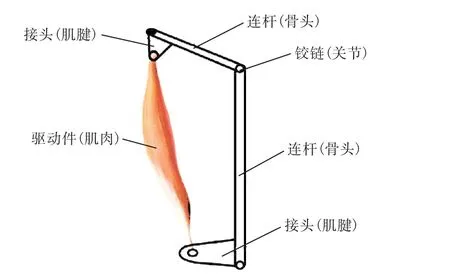
图1 肌肉驱动原理图Fig. 1 Muscle driving principle diagram
2 康复用下肢外骨骼整体结构设计
2.1 自由度配置及运动参数采集
在将足部看作一个整体的情况下,人体单侧下肢主要有 7个自由度.其中:髋关节有 3个自由度;踝关节有 3个自由度,分别是在矢状面上绕冠状轴的屈/伸运动,冠状面上绕矢状轴的外展/内收运动,水平面上绕垂直轴的旋内/旋外运动;膝关节有 1个自由度,是在矢状面上绕冠状轴的屈/伸运动[7].
考虑脑卒中患者进行康复训练时的下肢运动主要集中在矢状面上;人行走需要的力量主要来源于髋关节和膝关节,与下肢矢状面的自由度相关性最大,故本文设计的外骨骼主要考虑矢状面上的运动.该装置在矢状面内设置髋关节和膝关节为主动自由度,即利用外骨骼髋关节和膝关节的驱动装置带动人体髋关节和膝关节运动.踝关节设置为被动自由度,即外骨骼的踝关节随着人体踝关节运动进行调整,保证人体与外骨骼运动的协调一致.
选用1名身高1.76m,体质量75kg的健康成年男性作为实验对象.利用Vicon系统采集实验对象正常行走时的髋关节和膝关节角度变化曲线如图2所示.根据图 2中各关节的运动角度数据可以得到:髋关节屈极限为 17°,伸极限为 43°;膝关节屈极限为71°,伸极限为 0°.
2.2 机构设计
在髋关节和膝关节处设计四杆机构实现运动功能.利用安装在髋关节和膝关节处的驱动装置产生的直线运动,带动关节的旋转运动.人体下肢运动的极限位置见图3.
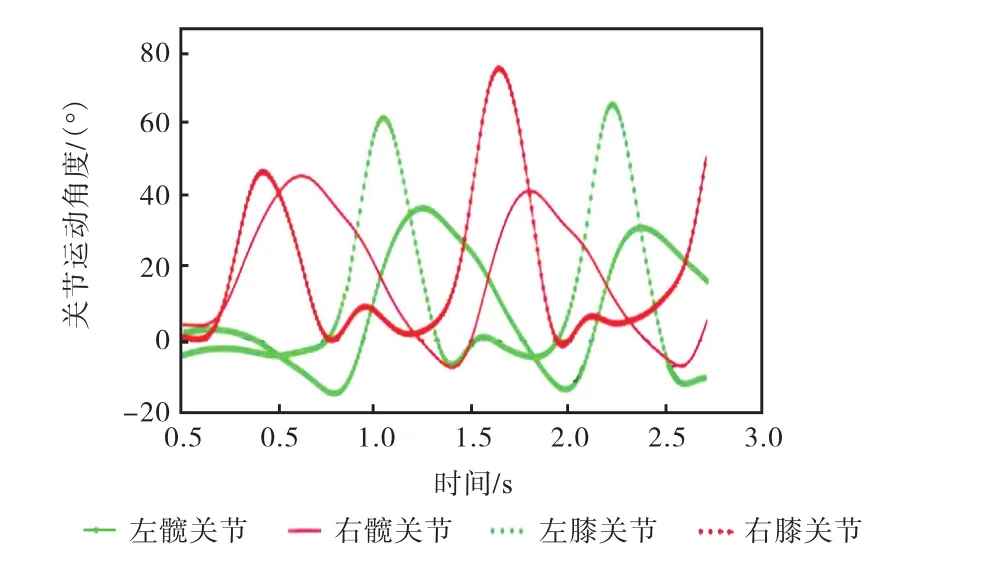
图2 髋关节和膝关节的运动角度变化图Fig. 2 Change of hip and knee joint angle
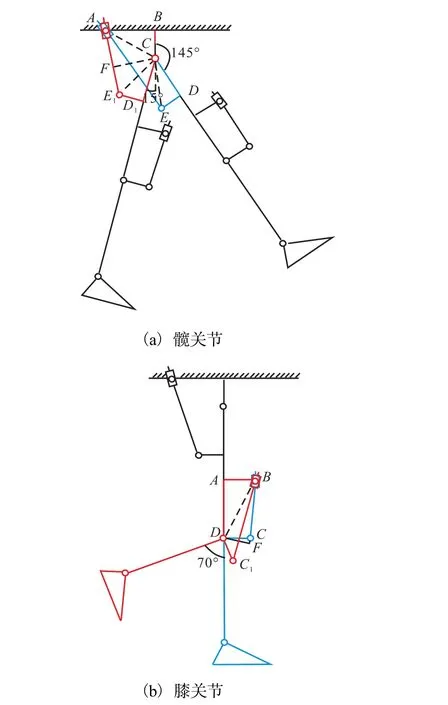
图3 下肢机构运动极限位置简图Fig. 3 Motion limit position of lower limb
结合四杆机构的原理、装置的运动轨迹和正常人体的尺寸可以确定四杆机构各杆件的长度.分析下肢残障患者前期恢复步态行走的特点,结合实验测得人体步态数据,设置外骨骼装置的髋关节屈极限15°,伸极限 35°;膝关节屈极限 70°,伸极限 0°.利用各关节的极限位置计算滚珠丝杠的行程.髋关节处滚珠丝杠的行程如图3(a)所示,AE1表示丝杠完全缩回,丝杠安装位置至丝杠末端的长度.AE表示丝杠伸出一定距离,丝杠安装位置至丝杠末端的长度.其中,AB=100mm,BC=57mm,CD=CD1=90mm,DE=D1E1=50mm.
当髋关节屈15°时
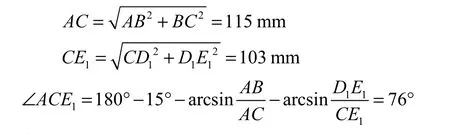
由余弦定理可知

当髋关节伸35°时

由余弦定理可知

故安装在髋关节处的滚珠丝杠的行程为

膝关节处滚珠丝杠的行程如图3(b)所示,BC表示丝杠完全缩回时,丝杠安装位置至丝杠末端的长度.BC1表示丝杠伸出一定距离时,丝杠安装位置至丝杠末端的长度.

当膝关节与地面垂直,即伸0°时

由余弦定理可知

当膝关节屈70°时

由余弦定理可知

故安装在膝关节处的滚珠丝杠行程为

2.3 驱动装置设计
人体下肢运动特性分析表明,人在正常行走过程中,通过骨骼肌直线收缩产生的拉力为各关节提供动力并转换成关节转动.故本设计采用伺服电机加滚珠丝杠的直线执行机构,其运动方式与人体下肢骨骼肌肉的运动相近.此方式利用了电机驱动的易于控制、运动响应快、精度高、驱动效率高的特点,而且连续工作制可达到 100%,能提供持续稳定的动力[8].根据滚珠丝杠需要的行程,后续对人穿戴外骨骼模型进行动力学仿真,分析计算后对滚珠丝杠和电机的参数进行选择.伺服电机的输入转矩与滚珠丝杠的推力关系为

式中:T为电机输入转矩,N·m;F为滚珠丝杠推力,N;L为滚珠丝杠导程,mm;η为电机到滚珠丝杠的传动效率.
计算得到能为髋关节和膝关节提供的最大转矩分别为
式中:Fh表示髋关节处滚珠丝杠的推力;Fk表示膝关节处滚珠丝杠的推力.
2.4 无级可调结构设计及材料选择
为使外骨骼达到人机高度协调,设计了无级可调结构,即可以根据穿戴者自身尺寸对外骨骼进行调节,保证该装置最大程度贴合穿戴者.外骨骼腿杆结构(以小腿杆为例)见图 4,上端碳纤维管和下端碳纤维管均与碳管端部螺纹套用环氧树脂粘接剂 DP460粘接,碳管端部螺纹套与六方中间杆细牙用螺纹连接,通过旋转六方中间杆细牙调节杆长达到所需长度,用轴端紧定螺母进行锁紧.大腿杆长调节方法采用相同原理.该装置的小腿杆长可调范围为 324~419mm,大腿杆长可调范围为 413~523mm,满足第99百分位人群使用.
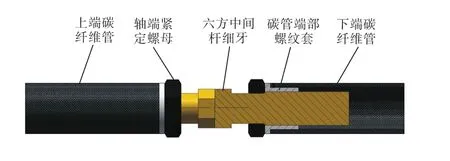
图4 小腿杆结构Fig. 4 Leg rod structure
使用新材料是实现轻量化设计的重要途径[9].装置中除了标准件外,关节处的活动部件采用航空铝材料,其他部位包括靠背、腰部、大小腿杆、脚板均使用碳纤维材料.航空铝材料易加工、抗氧化、耐腐蚀.碳纤维材料质量轻、抗拉强度好、寿命长.使用碳纤维和航空铝材料后,与课题组上一代外骨骼的总质量 30kg相比,减轻了 5kg.建立的外骨骼三维模型如图5所示,样机如图6所示.

图5 外骨骼三维模型Fig. 5 3D model of exoskeleton

图6 外骨骼样机Fig. 6 Exoskeleton prototype
3 动力学仿真
采用交互式仿真,即运用STEP角位移函数作为驱动函数,驱动髋关节和膝关节在矢状面转动,可以逆推出完成给定运动所需驱动力矩,进而确定滚珠丝杠及电机的参数.将建立的人体穿戴外骨骼三维模型简化后导入ADAMS中,如图7所示,分别为外骨骼和人体模型设置材料属性、添加约束和角位移驱动函数.
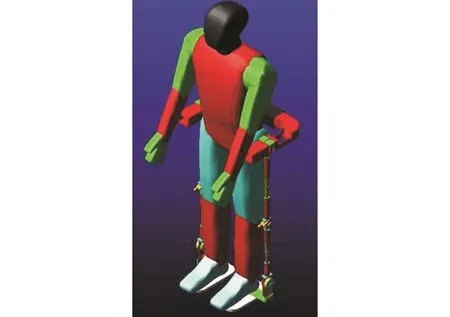
图7 ADAMS中的人体穿戴外骨骼模型Fig. 7 Model of human wearing exoskeleton in ADAMS
3.1 髋关节和膝关节的运动角度变化分析
将实验测得的人体步态数据输入 step驱动函数中,对外骨骼进行仿真.仿真结束进行后处理,输出髋关节和膝关节的角度、力矩等参数.其中测得人体右髋关节和右膝关节的运动角度变化曲线与装置仿真曲线见图8.
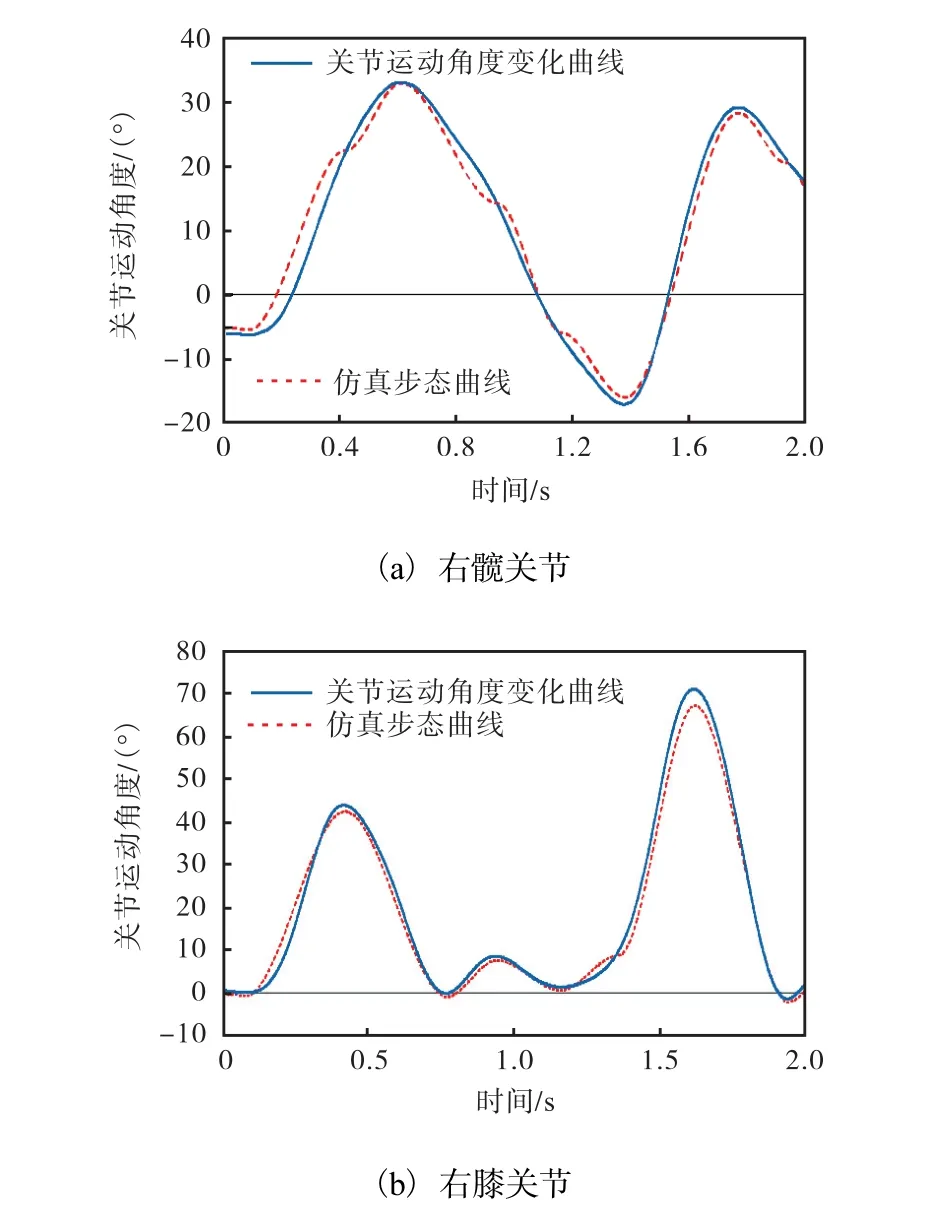
图8 人体右髋关节和右膝关节的运动角度变化曲线与装置仿真曲线Fig. 8 Experimental gait curve and the device simulation curve of human right hip joint and knee joint
将实际测量的髋关节和膝关节角度变化曲线与仿真曲线进行对比分析可知,仿真得到的髋关节和膝关节的运动角度范围均在人的正常运动范围之内,即穿戴外骨骼的步态曲线与人体正常步态曲线基本一致,人穿戴外骨骼后基本能按照人体步态曲线行走.
3.2 髋关节和膝关节的驱动转矩变化分析
根据图9的仿真结果,人体穿戴外骨骼系统在髋关节处产生的最大转矩为 241N·m,在膝关节处产生的最大转矩为77N·m.
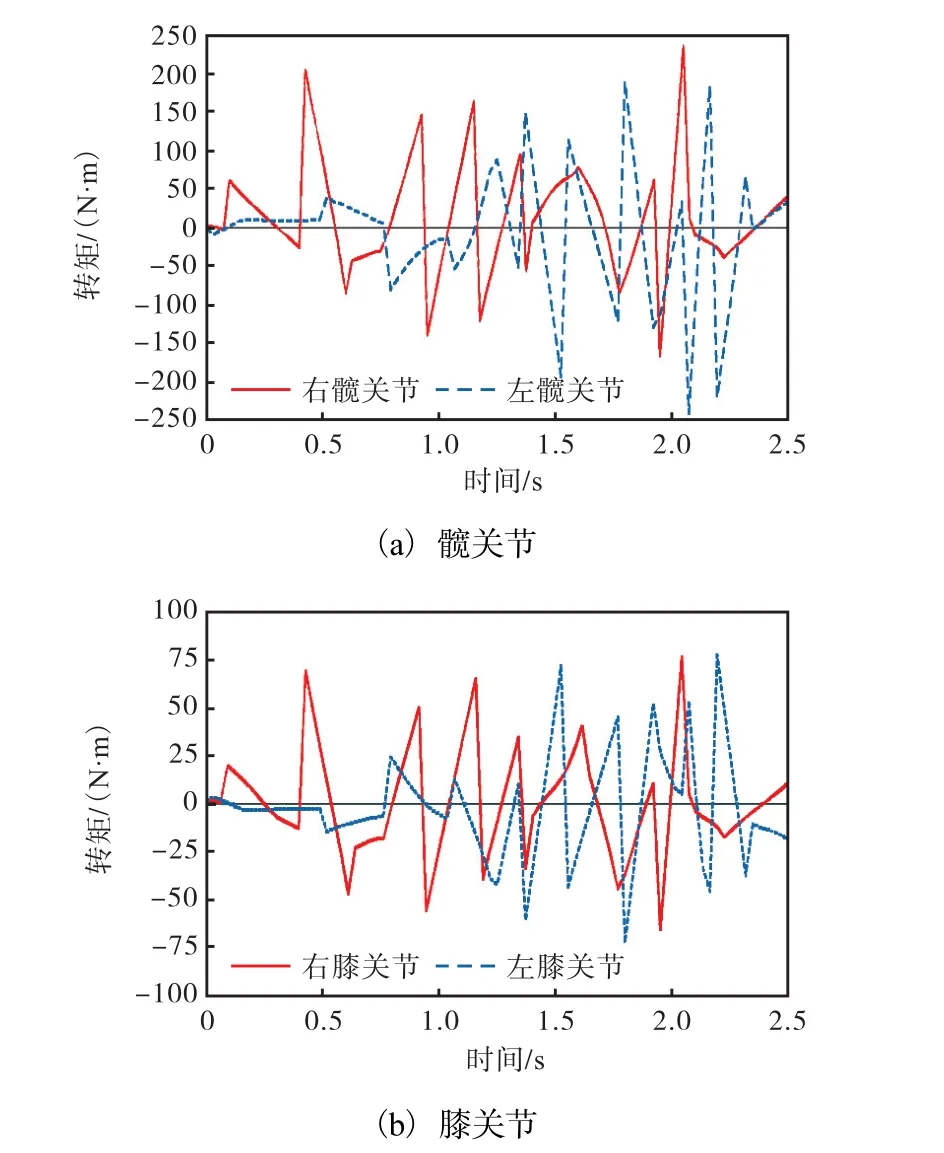
图9 装置髋关节和膝关节的转矩变化曲线Fig. 9 Curve of torque change of hip joint and knee joint in the device

表1 髋关节和膝关节处的动力元件参数Tab. 1 Parameters of dynamic elements of hip joint and knee joint
根据仿真的力矩选择的髋关节、膝关节动力元件的参数见表 1.通过式(1)—式(3)计算得髋关节处滚珠丝杠最大的推力为 3391.2N,膝关节处滚珠丝杠的最大推力为 1836.9N.两关节处滚珠丝杠的最大推力均小于所选择滚珠丝杠的最大动载.髋关节处的驱动装置提供的最大转矩为 288.3N·m,膝关节处的驱动装置提供的最大转矩为97.5N·m.两关节处的驱动装置提供的转矩均大于人穿戴下肢外骨骼仿真所得的最大转矩.结果说明选取的驱动装置满足人体穿戴下肢外骨骼行走的动力需求.
4 结 语
本文设计了一款六自由度康复用下肢外骨骼,采用无级可调结构的设计满足第 99百分位人群使用.主要杆件均使用碳纤维或航空铝材料,减轻了装置质量.建立动力学模型并用 ADAMS软件对外骨骼进行动力学仿真,确定了电机与滚珠丝杠的参数.仿真结果表明人穿戴外骨骼能按照人的步态行走.通过有线电源驱动,人穿戴外骨骼样机进行了行走试验,验证了仿真结果的正确性和装置设计的合理性.
猜你喜欢
军事文摘(2024年6期)2024-02-29 09:59:38
小哥白尼(野生动物)(2021年12期)2021-03-29 01:15:34
高师理科学刊(2020年2期)2020-11-26 06:01:16
制造技术与机床(2019年11期)2019-12-04 05:50:26
深圳职业技术学院学报(2015年5期)2015-11-30 06:22:25
发明与创新(2015年25期)2015-02-27 10:39:14
机械制造与自动化(2014年1期)2014-03-01 04:21:45
机械与电子(2014年3期)2014-02-28 02:07:57
