
基于“虚拟复阻抗”的低压微网下垂控制策略
2019-01-30 03:20李圣清李静萍
电气自动化 2018年5期
李圣清, 李静萍
(湖南工业大学 电气与信息工程学院,湖南 株洲 412007)
0 引 言
近年来,微电网凭借着多样化的供能模式以及弹性的控制方式,逐渐成为国内外炙手可热的研究焦点[1-2]。微电网由多个DG单元和负载构成,通过公共耦合点( PCC )连接至主电网,控制静态传输开关来监测微电网和主电网状态。由于微网系统中的逆变器微源种类多,且分散广的特点,使其难以实现高速通信。而微网并联逆变器的下垂控制方法对通信平台的依赖性低,故在微网应用中受到广泛青睐[3]。常规的下垂控制方法主要是应用于阻感比(R/X)较小的高压输电线路中,此时各并联逆变器的等效输出阻抗呈现纯感性,有功功率P对δ和无功功率Q对电压U之间的关系近乎解耦[4]。在低压微网或线路阻抗呈阻性的系统中,高的阻感比将会使得逆变器功率耦合加强,系统稳定性降低,从而难以实现对电能质量的有效控制。为降低线路的阻感比,可以在线路中串联些许电感并通过改造硬件电路来增加线路的电感量,使线路阻抗趋于感性化。然而改造硬件电路则需要重新设计电路,加大线路损耗以及设计成本,经济性较差。相比之下,优化微源控制策略,调节系统的等效输出阻抗会更加有效。文献[5]提出了虚拟阻抗的方法,引入了一个虚拟负电阻和电感来改善无功功率的均分性能,但是线路参数很难得到。文献[6-7]为调节微源输出阻抗,利用虚拟阻抗方法,从电压闭环指令中减掉虚拟阻抗两端的压降。该方式有效降低了线路的阻抗性对输出功率的影响,不足之处在于微源输出端会出现电压降落的问题。针对这一缺陷,文献[8]将虚拟阻抗模拟为虚拟同步发电机电抗,取代传统的Q-V下垂控制环,以此来弥补微源的电压降落,减少电压跌落。文献[9]提出采用通信与虚拟阻抗结合的方式控制调节自适应虚拟阻抗来弥补馈线间电压下降的不足。但该方法需要数据通信平台的接入,下垂控制应用的广泛性和长期性受到了限制。文献[10]提出一种无需外界通信平台参与的无功功率虚拟阻抗Q-V-I的控制策略。通过自适应虚拟阻抗实现无功均分,同时设置虚拟阻抗的系数为无功功率均分比的平方值来弥补电压下降的不足。该控制策略可适用于纯电感阻抗网络以及复杂的电阻阻抗网络,无功均分精度有所提升。
本文首先分析了基于传统三环下垂控制的原理,提出考虑阻感比的通用下垂控制表达式,然后对传统虚拟阻抗的引入会引起电压跌落问题进行了详细说明,提出动态的虚拟复阻抗控制策略。在本控制策略下,虚拟阻抗值可以根据系统所需自适应调整取值。相比于常规引入虚拟阻抗方法,该控制策略解决了线路电压跌落大的问题,实现了对低/中压配电网电能质量的灵活有效控制。
1 传统三环下垂控制原理
图1所示为并联逆变器的等效电路模型图。
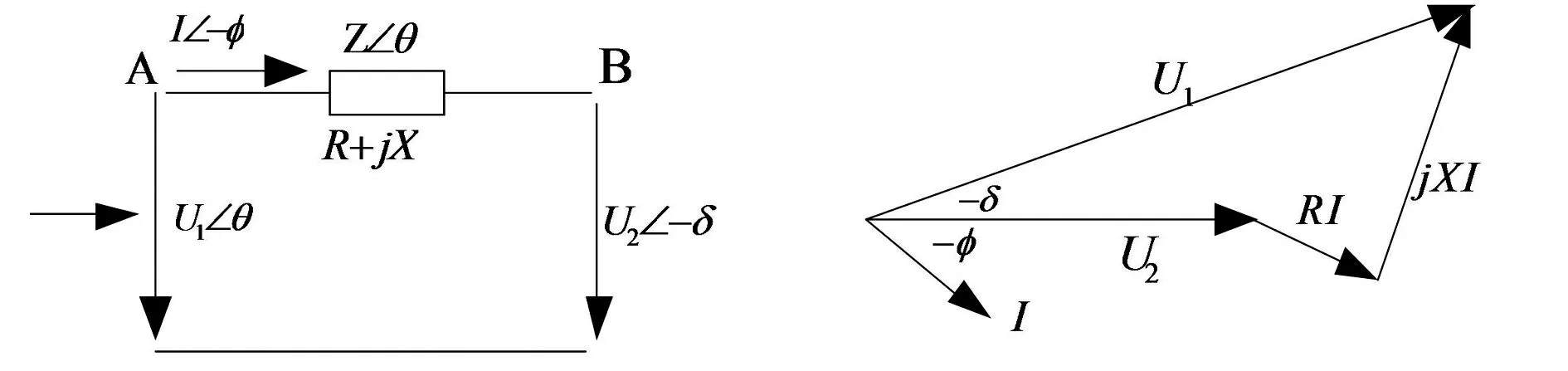
(a)并联逆变器简化模型 (b)向量图 图1 并联逆变器等效电路模型
逆变器向交流母线注入的视在功率S可表示为:

(1)
式中:U1为参考电压有效值;U2为交流母线电压有效值;I*为流经阻抗的电流共轭值;Φ为功角;Z为系统阻抗的模值;θ为阻抗角;δ为功角;X和R分别为系统感抗和电阻。流进线路的有功功率P和无功功率Q可表示为:
(2)
(3)
由于Zejθ=R+jX,故式(2)~式(3)可改写为:
(4)
(5)
或者:
U2sinδ=(XP-RQ)/U1
(6)
U1-U2cosδ=(RP+XQ)/U1
(7)
长距离架空线路中,存在X≫R,故系统电阻R可忽略。若功角δ较小,则有sinδ≈δ,cosδ≈1。此时式(6)~式(7)可简化为:
δ≅XP/U1U2
(8)
ΔU=U1-U2≅XQ/U1
(9)
式中:ΔU为线路参考电压和母线电压间的电压差。上式表明,在电感远大于电阻的长距离线路中,微源有功输出P和无功输出Q分别取决于电压相位δ和电压差ΔU,且成正比。因此通过控制δ和电压差ΔU,可以相应地实现有功和无功的解耦控制。传统的下垂控制方法可表示为:
f=f0-mP
(10)
U=U0-nQ
(11)
式中:f为系统频率;f0为系统参考频率;m、n分别为有功-频率的下垂增益和无功-电压的下垂增益。
2 虚拟阻抗法的电压跌落问题
式(10)~式(11)只适用于线路阻抗为感性的情况,当线路阻感较大时,一般采用虚拟阻抗方法增加线路电感量使线路近似于感性状态。虚拟阻抗法虽在调节范围上相对于闭环控制参数调节微源输出等效阻抗有较大的自由度,然而随着阻抗模值增加的越大,端电压跌落越快。假设系统线路阻抗为感性阻抗时,则系统线路阻抗ZD=jXD。当相角差δ较小时有:
(12)
式中:UD为电流在虚拟阻抗两端产生的电压;ΔU为线路两端的电压差;XD为虚拟阻抗;U*为根据微源的Q-V下垂特性得出的电压。当不计虚拟电感上的无功损耗时,微源输出端Q-U下垂特性可以表示为:
(13)
式中:U0为系统的参考电压;nD为引入常规虚拟阻抗后Q-U下垂曲线斜率的增加量。上式表明:当系统采用纯感性虚拟阻抗的微源时,系统输出端静态Q-U下垂特性仍然存在,相比于传统的下垂特性曲线,曲线斜率增加nD,且增量与虚拟阻抗XD成正比,即虚拟阻抗的增加会使得电压降落现象更加明显。
3 改进型下垂控制策略
根据上述原理,提出带有阻感比的下垂控制表达式如下:
f-f0=-m(P-P0)+rn(Q-Q0)
(14)
U1-U0=-rm(P-P0)-n(Q-Q0)
(15)
式中:m、n为下垂系数;r为线路阻感比,且r=R/X。f0为系统的参考频率;U0为系统参考电压;P0,Q0为有功功率和无功功率的参考值。由上可知,通过调节m、n和r,便可对逆变器输出的频率和电压幅值的波动偏差进行补偿。当r=0时,上式即为传统下垂控制方程。图2为在此控制下的有功和无功的下垂控制框图。

图2 PQ-FU下垂控制框图
4 设计虚拟复阻抗
常规Droop控制中逆变器输出端电压u0的表达式为:
u0(s)=G(s)-i0(s)Z(s)
(16)
式中:G(s)用来描述受控电压源对逆变器输出电压的跟踪性能;Z(s)为逆变器的等效输出阻抗;i0(s)为逆变器的输出电流。根据下垂特性曲线得到输出电压指令E*,与电流在虚拟阻抗两端产生的电压UD作差,得到最终修正后的输出逆变器电压指令vref为:
vref=E*-UD
(17)
构造虚拟复阻抗ZD(s)表达式为:
ZD(s)=sLv+Rv
(18)
式中:Rv为虚拟负电阻;Lv为虚拟电感。系统阻抗由逆变器的输出阻抗和线路的虚拟阻抗构成。当微电网为低压微网时,有Zline=Rline+sLline。则阻感比r可以表示为:
(19)
图3为引入虚拟复阻抗等效电路图。图中,Zline(s)为馈线阻抗,ZD(s)为引入的虚拟阻抗,Z0(s)为电压电流闭环等效输出阻抗,则逆变器等效输出阻抗为Z(s)为虚拟阻抗与电压电流闭环等效输出阻抗Z0(s)之和。Ubus为交流母线电压。其中电压环采用PI控制器追踪逆变器输出电压,电流环采用比例控制器调节电流。

图3 引入虚拟复阻抗后的等效电路图
图4所示为引入了上述的P-F和Q-U下垂特性及引入虚拟复阻抗后提出的微源三环控制方法原理框图。采用上述的下垂控制方法得到对应的下垂特性曲线,并计算得出修正后的微源输出端电压vref。电压和电流内循环实时更新,最终达到输出电压指令E*对修正后的vref实时跟踪的目的。
当虚拟阻抗为纯感性时,有ZD(s)=sL,此时逆变器输出电压为:
式中:Gu(s)、Gi(s)为电压外环和电流内环,且有Gu(s)=kup+kui/s,Gi(s)=kip,KPWM为PWM的等效增益;i0(s)为逆变器的输出电流;Lf和Cf为系统线路的感抗和容抗;vref为最终修正后的微源输出端电压指令。则逆变器的等效输出阻抗表达式为:
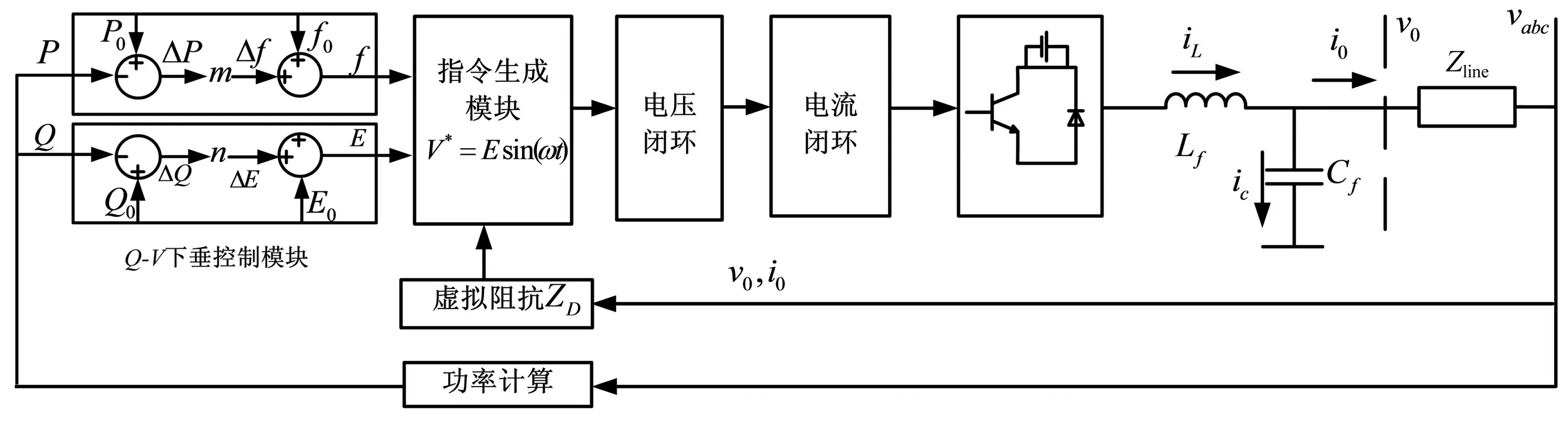
图4 “功率-电压-电流”三环控制方法
5 基于电压跌落的虚拟复阻抗的设计
系统总压降为:
ΔU=[Zinv(s)+Zline]i0(s)=
[G(s)ZD(s)+Z0(s)+Zline]i0(s)
(22)
为保证供电质量、减少系统电压降落和功率耦合,设虚拟阻抗值为:
(23)
式中:ΔE为系统在微电网负荷侧采样点的电压幅值与逆变器指令电压之间的差值;i0(s)为流经负载的电流。将式(22)与式(23)结合可得逆变器新的电压值为:
vref=vref1+ΔU
(24)
式中:vref1为当微电网进入孤岛运行状态时系统的指令电压。ΔU为电压降落的参考值。控制时先将vref1赋给电压控制环节,同时收集微网母线电压。此时逆变器的电压指令值将随着负载反馈后的电压值响应增大,更新迭代后的指令电压vref会使系统的输出电压得到提升,供电电压相比之前回归正常水平范围内,降低了虚拟阻抗引入后电压跌落大的影响。
6 仿真与试验
为验证本文提出的改进型下垂控制虚拟复阻抗策略的有效性,利用Simulink搭建如图5所示的微网系统的仿真平台。基于此仿真系统电路图,分析本文所采取的微源虚拟复阻抗下垂控制策略对于微网系统并联逆变器输出电压、频率以及有功和无功功率的改善作用。系统的仿真参数如表1所示。
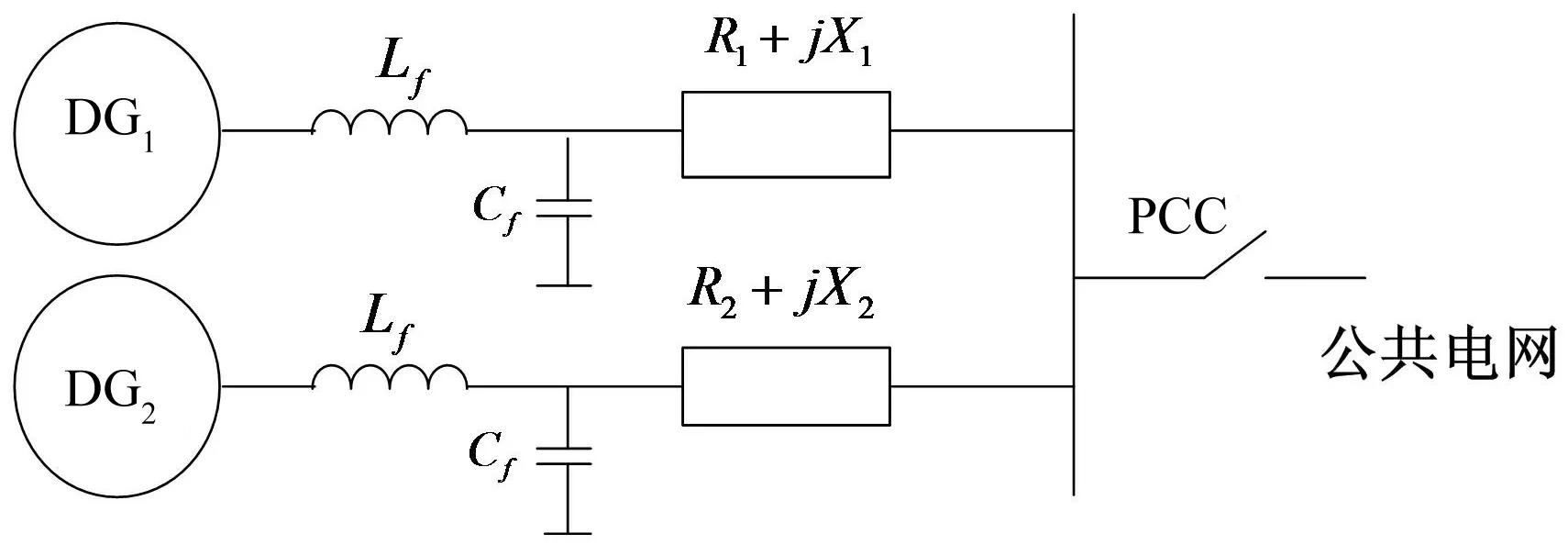
图5 多逆变器并联系统结构图
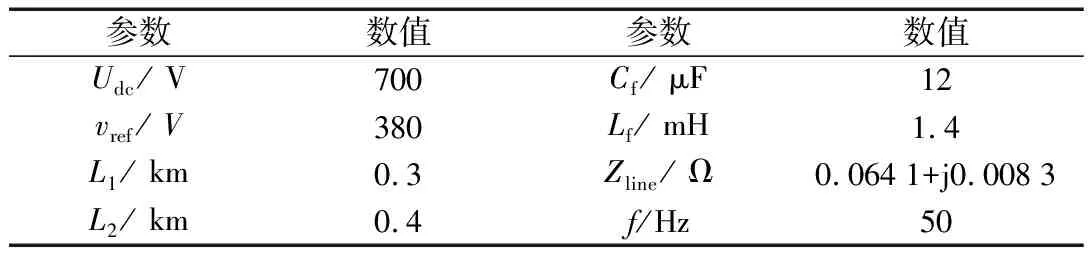
参数数值参数数值Udc/ V700Cf/ μF12vref/ V380Lf/ mH1.4L1/ km0.3Zline/ Ω0.0641+j0.0083L2/ km0.4f/Hz50
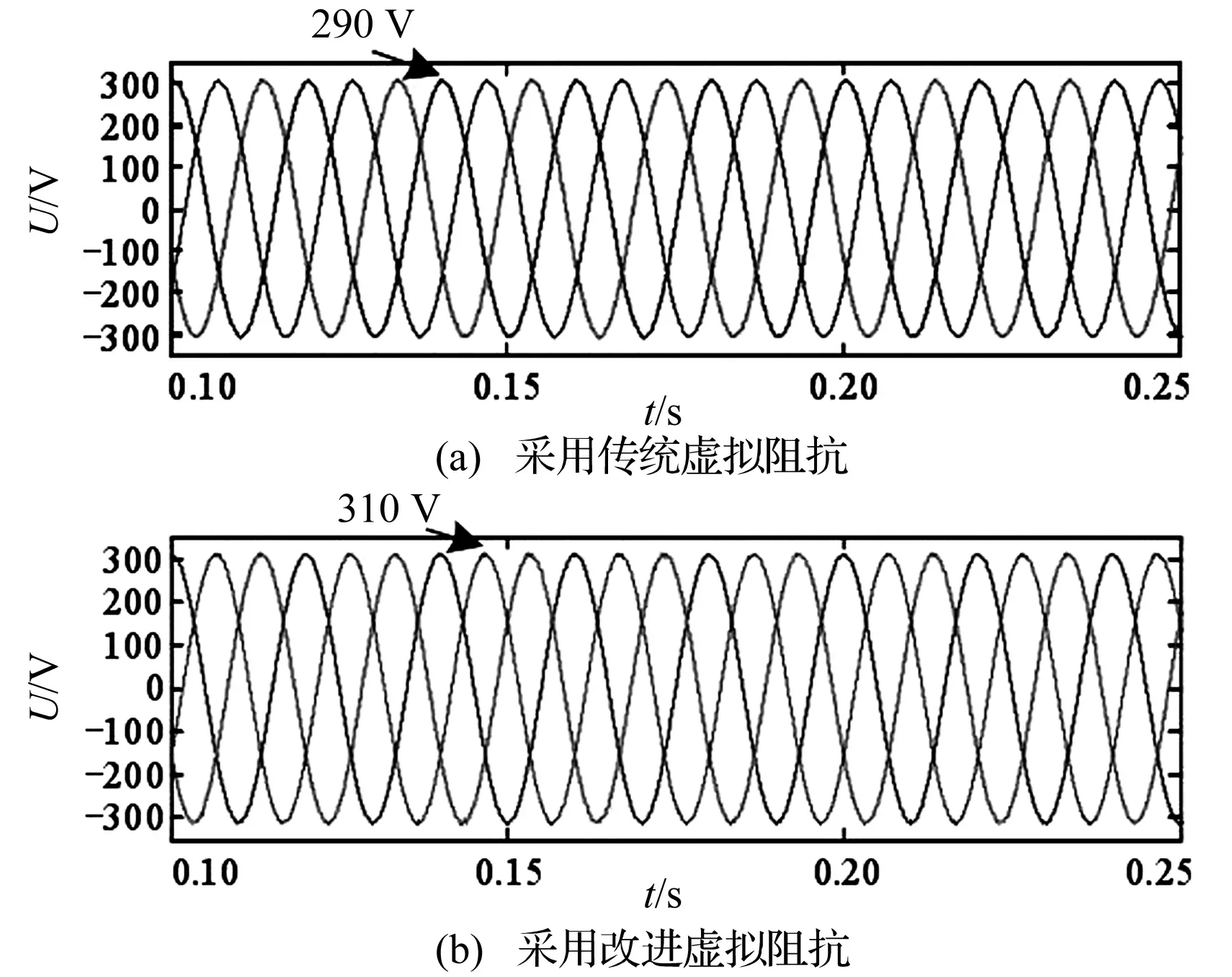
图6 输出电压对比图
图6所示为采用改进型的虚拟阻抗后的并联逆变器输出电压比较图。引入改进型虚拟阻抗前,系统输出端电压约为290 V,额定电压为311 V,电压出现明显的电压跌落。引入虚拟复阻抗后,逆变器输出电压幅值有所回升电压跌落差值明显降低。
图7所示为系统频率的结果对比图。在逆变器输出阻抗呈阻感性的情况下,采用本控制策略后的系统频率趋于稳定的速度加快,且更加稳定,偏差保持在0.1 Hz内。而采用常规的下垂控制策略在未加入虚拟复阻抗频率在1 s时开始偏离额定值,在0.2 s时才开始进入稳定状态。故改进型的下垂控制虚拟阻抗的下垂控制策略具有更好的控制性能。
当系统输出等效阻抗呈现复杂阻感特性时,引入虚拟复阻抗前后两台逆变器输出有功和无功率对比如图8所示。引入虚拟复阻抗前的有功和无功高度耦合,稳定性差。而引入虚拟复阻抗后的控制策略控制性能良好,当t=0.02 s时,系统趋于稳定控制状态,且功率波动幅度小。引入之前需要0.2 s才可以进入稳定状态,快速性得到提升。故改进后的控制策略可以更好地对有功和无功功率进行解耦,实现均分。

图7 两种方案的频率对比图
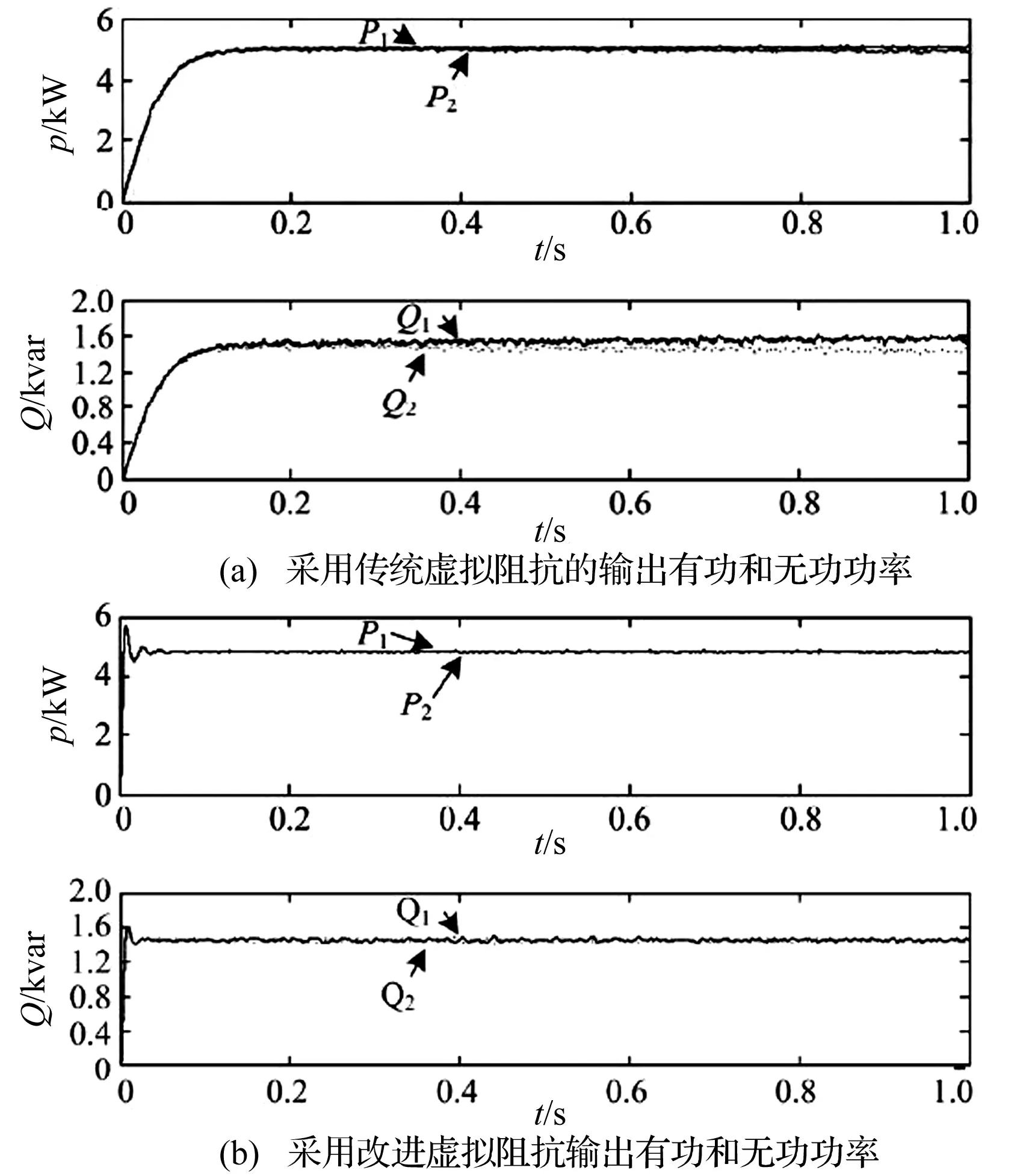
图8 输出有功和无功功率比较
7 结束语
本文在分析低压微网传统下垂控制的基础上,通过采用自适应虚拟阻抗调节微网并联逆变器的等效输出阻抗,使其趋于感性状态。所采用的虚拟阻抗可自适应调整取值。相比传统方法,不仅减少了电压跌落,也较好地实现了功率的均衡控制,提高了微源运行时的供电质量。通过仿真验证了该控制策略的正确性和有效性,能够实现对低/中压配电网电能质量的灵活有效控制。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
中国环境监察(2016年7期)2016-10-23
现代工业经济和信息化(2016年8期)2016-05-17
通信电源技术(2016年6期)2016-04-20
通信电源技术(2016年1期)2016-04-16
电测与仪表(2016年24期)2016-04-12
通信电源技术(2016年5期)2016-03-22
西部广播电视(2015年10期)2016-01-18
电测与仪表(2015年16期)2015-04-12
电测与仪表(2015年19期)2015-04-09
