
双电机控制传统五桥臂逆变器拓扑的改进研究
2019-01-30 03:20季高付光晶张峰张士文
电气自动化 2018年5期
季高, 付光晶, 张峰, 张士文
(上海交通大学 电子信息与电气工程学院,上海 200240)
0 引 言
近年来,在很多工业领域的应用中,例如:石油开采、电动/混合动力汽车和航空航天等,常常需要对二台电机进行高性能的独立控制[1]。为了降低系统成本和减小系统的体积,很多学者做了相关研究。目前共有三种典型的拓扑,采取的方式都是对传统的几种逆变器拓扑(如三相六开关逆变器或是三相四开关逆变器)做相应的变化,然后再提出对应的改进后的SPWM或SVPWM算法。
文献[2-3]提出了一种四桥臂的拓扑,整流桥采用传统的单相不控整流桥,逆变桥有四个桥臂,每个桥臂上有两个开关管,采用的是两个传统四开关逆变器共用直流母线电容的方式,两个四开关逆变器都使用SVPWM控制,四开关逆变器的直流电压利用率只有50%,且两台电机共用直流母线电容会造成电容中点电压波动,所以两台电机的受控效果(如电机的额定状态下稳定运行效果和动态运行效果)会受到影响。文献[4-5]提出了一种九开关拓扑,整流桥采用传统的单相不控整流桥,逆变桥采用三个桥臂,每个桥臂上有三个开关管,两台电机共用中间三个开关管,电机1使用上面三个开关管加中间三个开关管共六个开关管,电机2使用下面三个开关管加中间三个开关管共六个开关管。采用的控制方式是当电机1正常工作时,下面三个开关管全部导通,电机2用零矢量控制;当电机2正常工作时,上面三个开关管全部开通,电机1用零矢量控制。显然这种控制方式很难实现对两台电机的独立控制。文献[6]提出了一种五桥臂拓扑,整流桥采用传统的单相不控整流桥,逆变桥有五个桥臂,其中一个桥臂是两台电机的公用桥臂与两台电机的c相相连,另外四个桥臂分别与两台电机的a相和b相相连。同时还提出了一种SPWM的调制方式,这种调制方式下的五桥臂拓扑不存在四桥臂拓扑电容中点电压波动的问题,也不存在九开关拓扑很难独立控制的问题,但是其直流电压利用率只有50%。
本文首先解释了传统五桥臂拓扑中逆变桥所采用的调制方式,然后引出了新型的五桥臂拓扑结构,紧接着介绍了该拓扑所使用的控制策略,最后在MATLAB/Simulink 中建立含双电机负载的仿真模型,对所述改进的拓扑的优越性和可行性进行了验证。
1 传统五桥臂拓扑及其逆变器侧调制方式
传统的五桥臂拓扑如图1所示,整流器拓扑侧采用传统的单相不控整流桥,由四个二极管D1~D4组成,逆变器拓扑侧使用10个开关管。通过S1~S6构成电机M1的三相六开关逆变器,通过S1,S2, S7~S10构成电机M2的三相六开关逆变器,其中 S1,S2是公用的开关管。
对于传统的三相六开关逆变器的SPWM算法,若给定频率为f,可设三相给定电压为:
Va*=Vm·sin(2πft)
(1)
Vb*=Vm·sin(2πft-2π/3)
(2)
Vc*=Vm·sin(2πft+2π/3)
(3)
把三相给定电压Va*、Vb*、Vc*减去同一个偏置电压同样可以作为各相的调制波,例如,如图2把三相给定电压同时减去Vc*,则三相的调制波分别为:
VLc*=0
(4)
VLa*=Va*-Vc*
(5)
VLb*=Vb*-Vc*
(6)
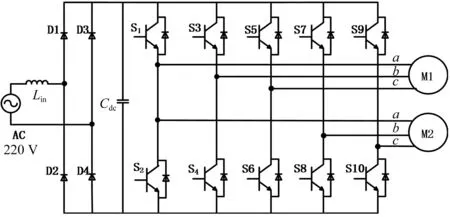
图1 传统五桥臂拓扑
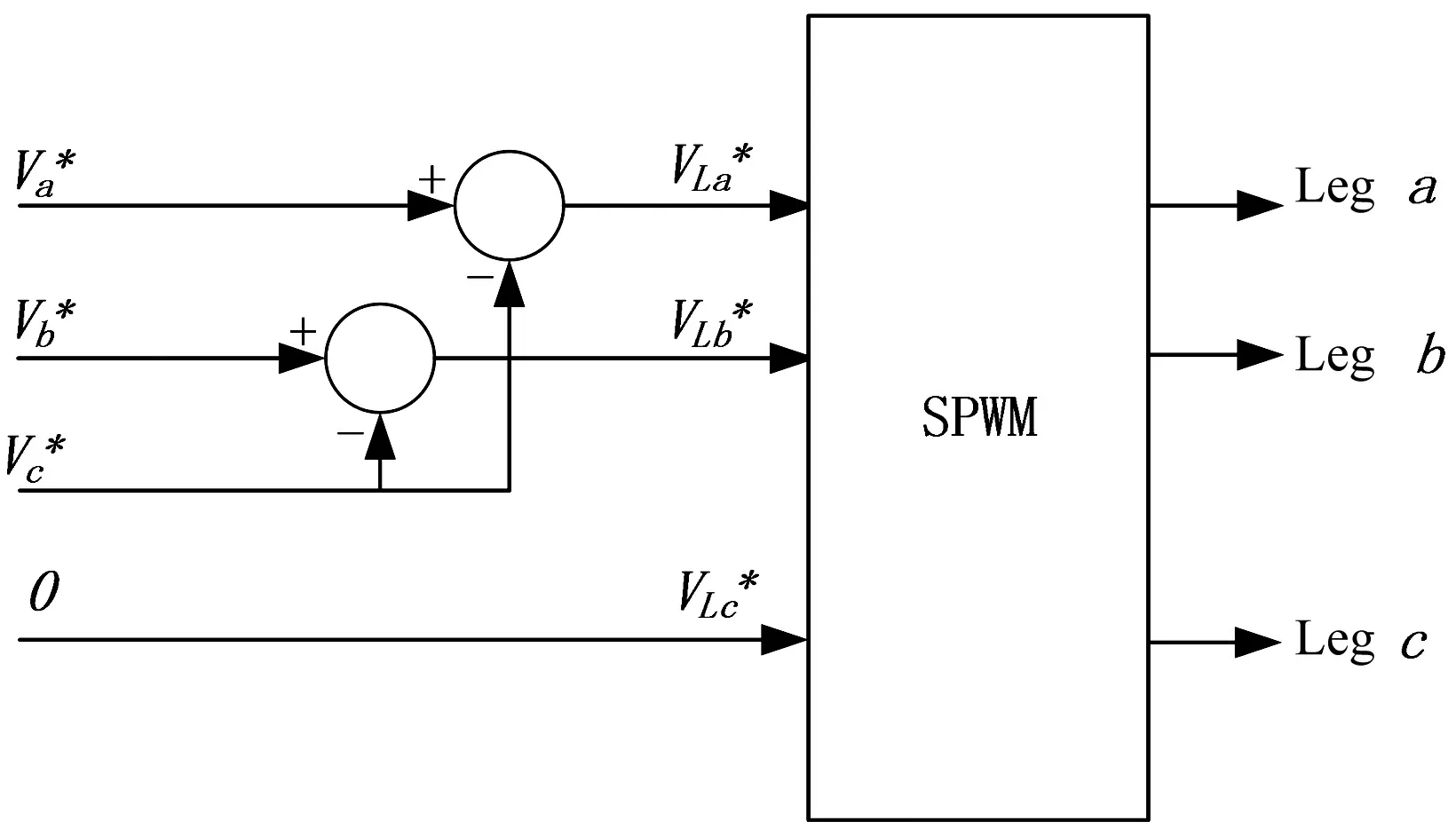
图2 传统五桥臂拓扑逆变器拓扑侧的三相调制波
在这种调制方式下,传统五桥臂的直流电压利用率每台电机都只能达到50%,当对电机负载要求较高时,直流电压可能会不够用,为此本文提出了一种新型的五桥臂拓扑。
2 新型五桥臂拓扑
新型五桥臂拓扑如图3所示,逆变器拓扑侧采用和传统五桥臂一样的构造和连接形式,整流器拓扑侧由二个二极管D1和D2以及逆变器侧的公用开关管S1和S2组成。
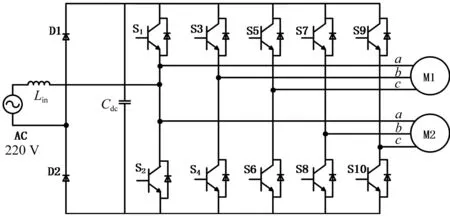
图3 新型五桥臂拓扑
逆变器拓扑侧采用的调制方式与传统五桥臂一样,所以其直流电压利用率只能达到50%,整流器拓扑侧是一种倍压整流电路,其等效电路如图4所示,根据网侧电压极性和网侧电流流向,S1和S2的开关状态共有四种工作模式,如图5所示。在这种整流侧拓扑下,直流侧母线电压可以达到倍压的效果,从而解决了传统五桥臂直流电压利用率低和直流母线电压不够用的问题。
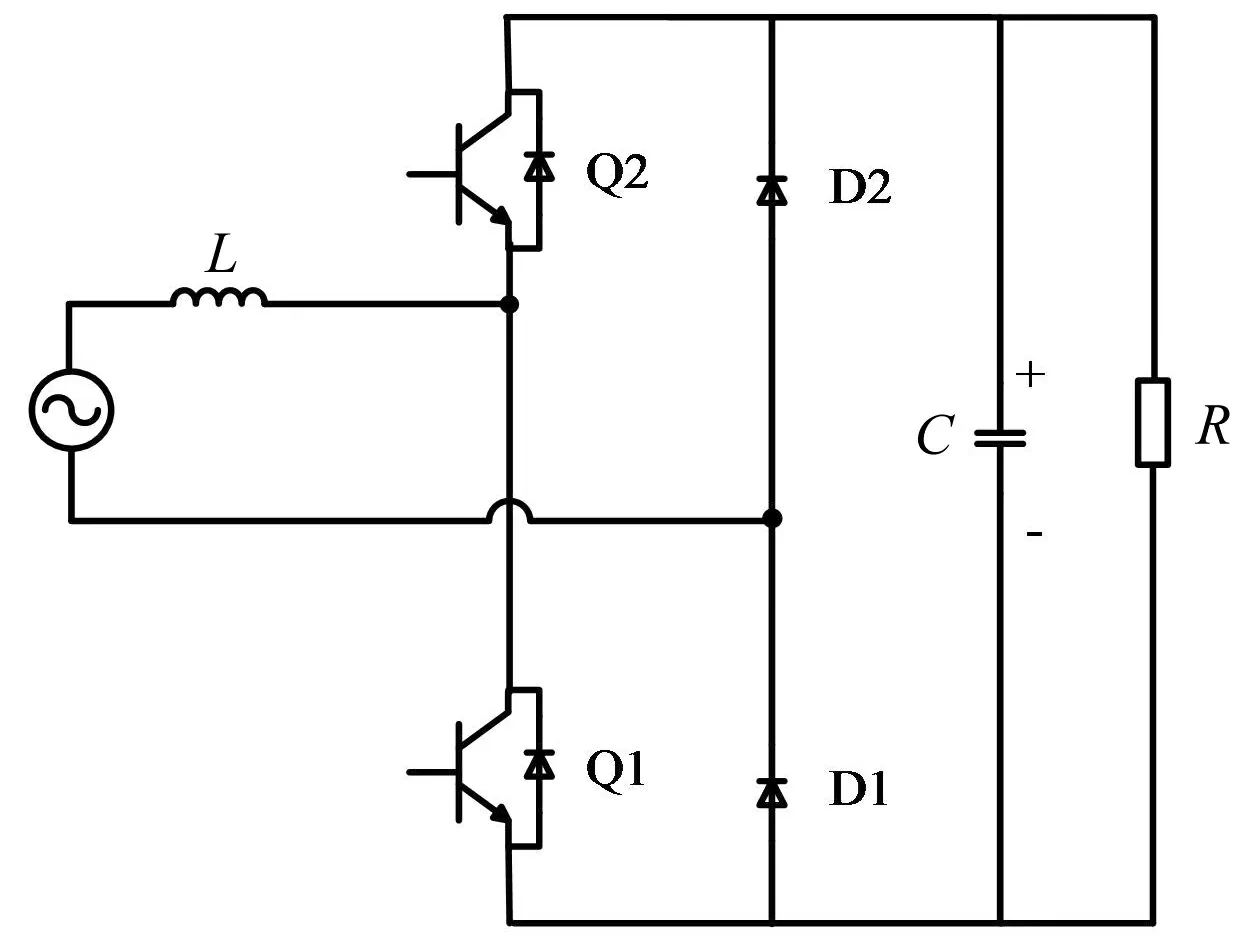
图4 新型五桥臂拓扑整流侧等效电路

图5 新型五桥臂拓扑整流侧四种工作模式
3 控制策略
基于改进的双电机逆变器拓扑的单台电机的矢量控制策略的框图如图6 所示,其与传统矢量控制策略[7]相似,图中id电流给定根据弱磁控制id电流轨迹方程计算得到,iq电流给定由转速偏差经过一个PI 控制器后得到,采用转速外环和电流内环双闭环控制。因为两台电机使用的矢量控制策略类似,所以图6仅表示单台电机的矢量控制策略。
图中的id电流轨迹方程由电压极限圆方程[8]推得,推导过程如下:

(7)
式中:Vom为电机M1/电机M2可以达到的相电压基波幅值;ω为电机1/电机2的电角速度,rad/s;Ra和Ia分别为A相的相电阻和相电流;Ud和Uq分别为各相电压的直流分量和交流分量;φd和φq分别为直流磁通分量和交流磁通分量,Wb/m2。
忽略电阻压降,近似可得:
(8)
进而可得id轨迹方程为:
(9)
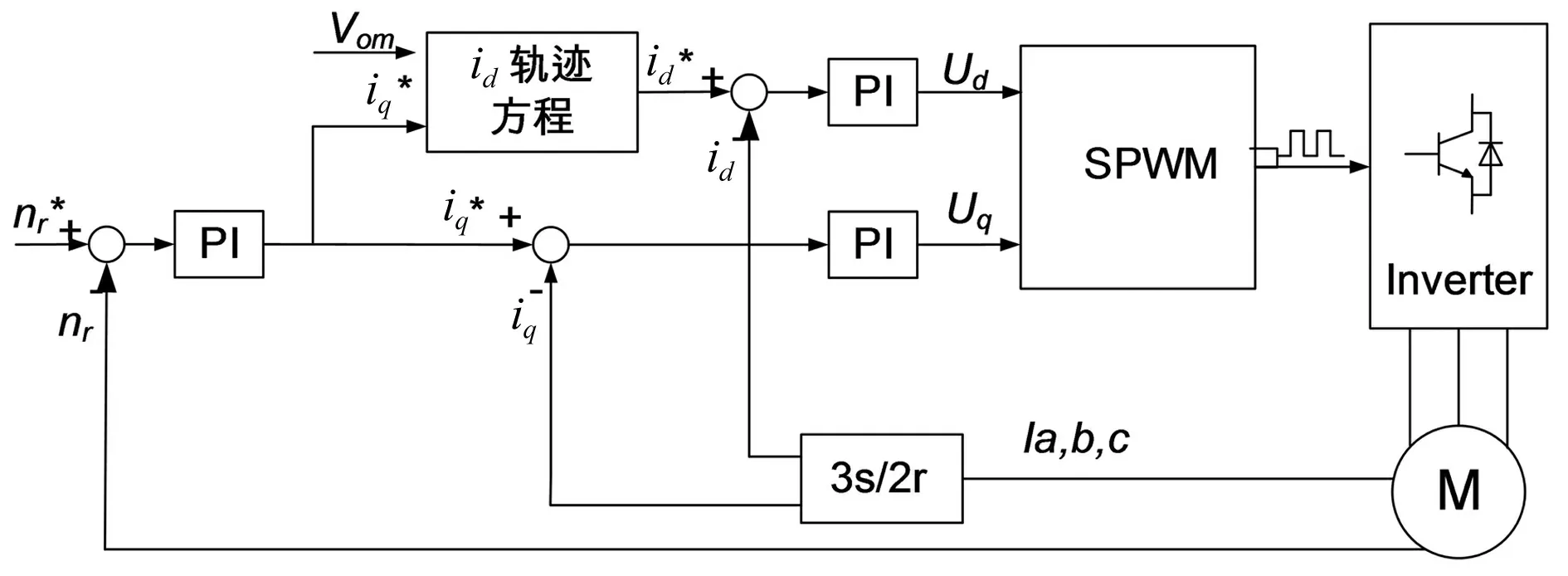
图6 基于新型五桥臂拓扑的PMSM矢量控制框图
4 系统仿真验证
按照图3搭建基于改进的双电机逆变器的PMSM矢量控制系统的仿真模型。电机Motor1的参数如表1所示,电机Motor2的参数如表2所示。按第1节所述调制方式和第3节的控制策略建立对应的控制系统。
采用的网侧电压为幅值为311 V工频正弦波,各硬件参数分别如下:输入电感L为1 mH,电容组选用两个470 μF进行串联,开关器件为600 V,25 A的IGBT,开关频率设置为10 kHz。

表1 电机Motor1参数

表2 电机Motor2参数
电机Motor1的转速给定为斜坡增加至额定转速5 400 r/min,2 s后跳变至2 000 r/min,负载转矩初始为1 N·m,5 s后跳变至额定转矩2.38 N·m;电机Motor2的转速给定为斜坡增加至额定转速850 r/min,3 s后跳变至500 r/min,负载转矩初始为4 N·m,4 s后跳变至额定转矩6.3 N·m。相应的波形如图7~图13所示。
由图7可知,直流母线电压可以达到600 V左右,比传统五桥臂理想状态下的311 V多了近一倍。
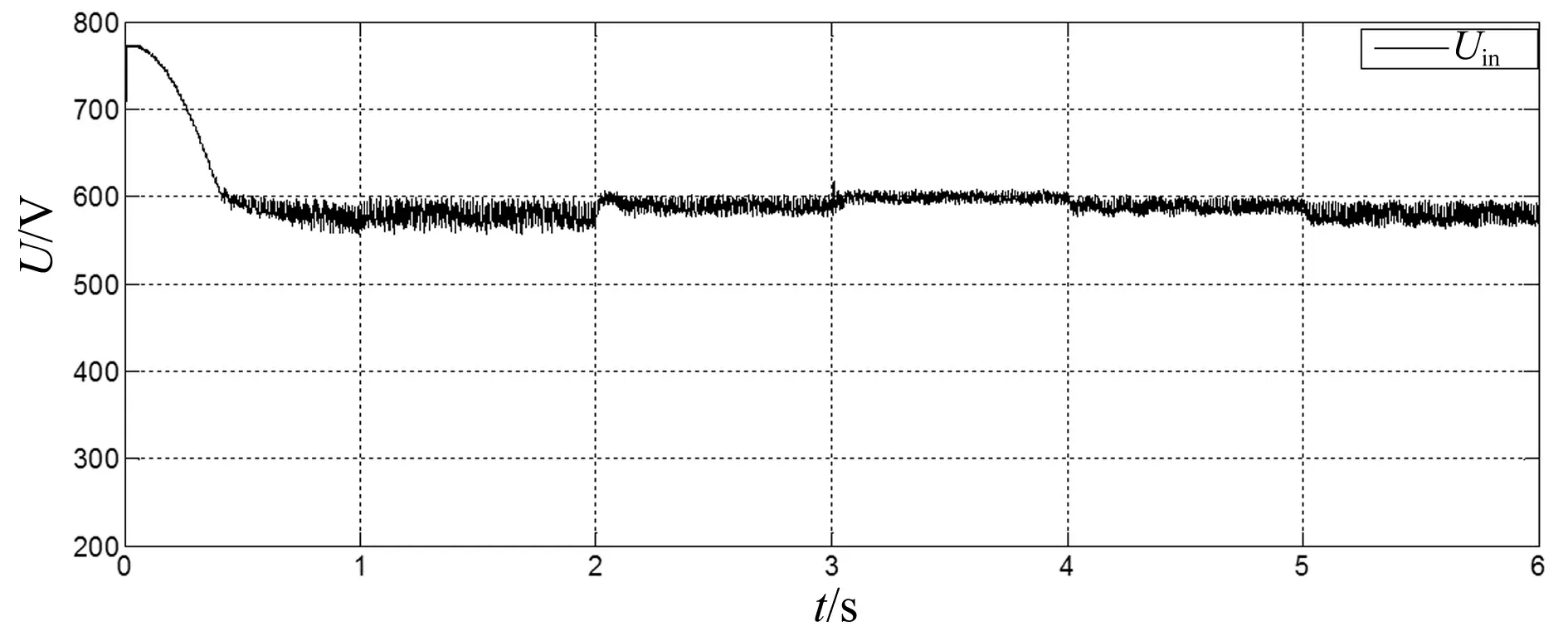
图7 网侧电压Uin波形
由图8~图13可知,在改进的双电机逆变器的控制下,电机能够很好地跟随给定转速和给定转矩,具有良好的动态性能,且可以发现电机Motor1的转速转矩及id、iq的波动只发生在2 s和5 s时,所以电机Motor2的转速转矩突变不会影响电机Motor1的运行,相应地,电机Motor1的转速转矩突变不会影响电机Motor2的运行,可见这两台电机是被独立控制的。

图8 电机Motor1的转速跟踪波形

图9 电机Motor1的转矩跟踪波形

图10 电机Motor1的id、iq跟踪波形
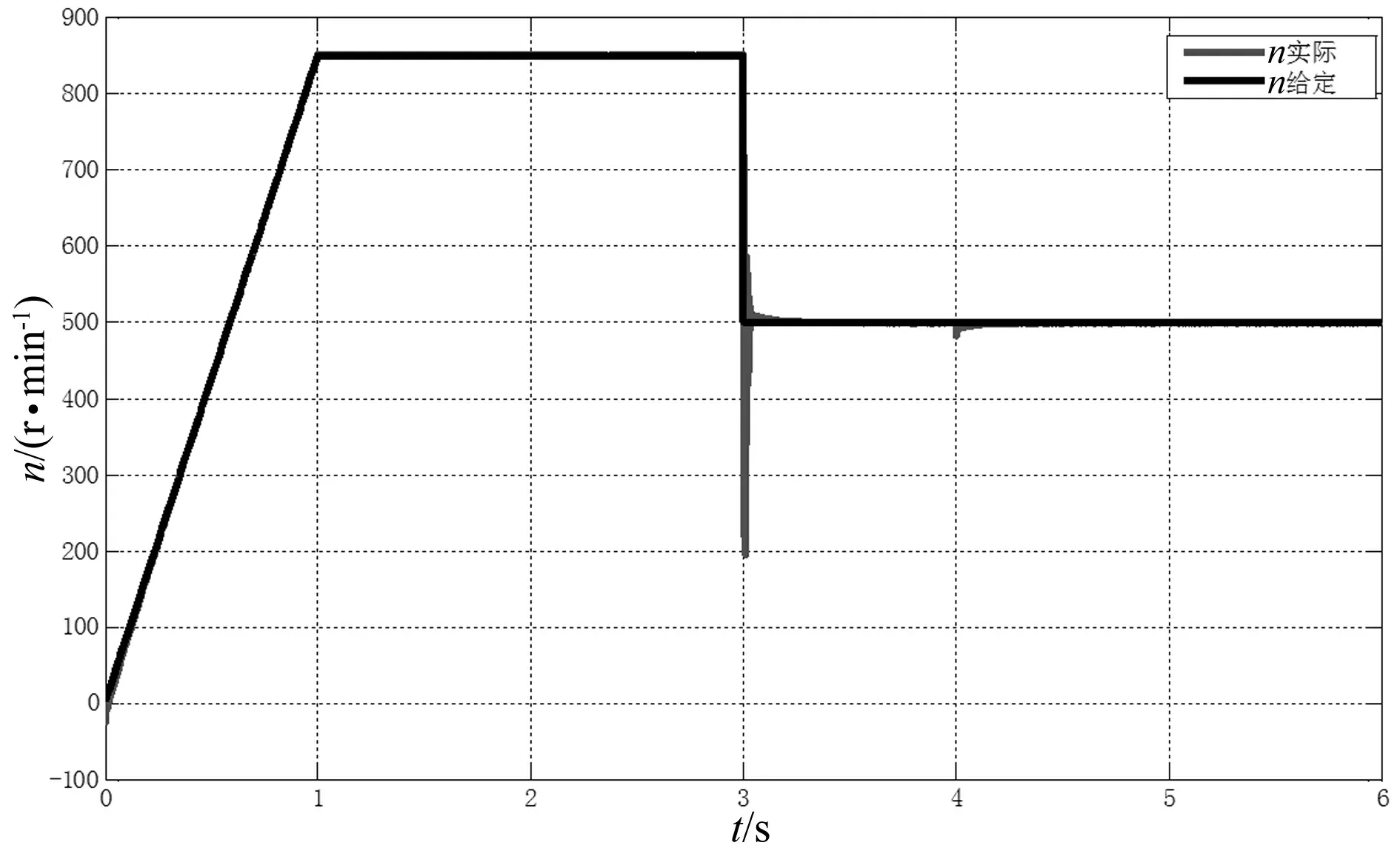
图11 电机Motor2的转速跟踪波形
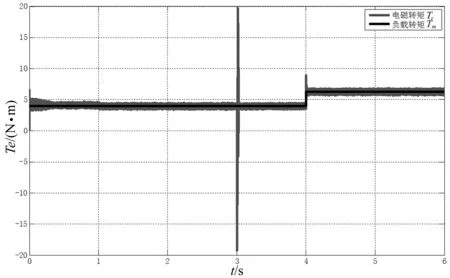
图12 电机Motor2的转矩跟踪波形

图13 电机Motor2的id、iq跟踪波形
5 结束语
本文指出了传统双电机逆变器拓扑存在的问题,在此基础上针对传统五桥臂拓扑提出一种改进的双电机逆变器拓扑。通过保持逆变桥拓扑不变,改变整流桥拓扑来弥补传统五桥臂拓扑中直流电压利用率低的问题。最后在Simulink环境下进行了仿真,验证了改进的双电机逆变器拓扑的可行性和优越性。仿真结果表明,所提逆变器拓扑拥有良好的动态性能,且解决了传统五桥臂拓扑电压利用率较低的问题。
猜你喜欢
哈尔滨铁道科技(2020年4期)2020-07-22
科技传播(2019年14期)2019-09-16
中国实用神经疾病杂志(2018年9期)2018-05-25
电气传动(2015年4期)2015-07-11
电测与仪表(2015年21期)2015-04-09
电测与仪表(2015年12期)2015-04-09
电源学报(2015年6期)2015-02-18
中国医药导报(2015年20期)2015-01-11
电测与仪表(2014年14期)2014-04-04
电测与仪表(2014年2期)2014-04-04
