
电力电子与电力传动DSP-HIL教学实验平台设计
2019-01-30 02:23毕大强郭瑞光陈洪涛
实验技术与管理 2019年1期
毕大强, 郭瑞光, 陈洪涛
(清华大学 电机系 电气工程实验教学中心, 北京 100084)
电力电子和电力传动技术的飞速发展,正在快速改变人们的生活方式,例如高铁技术改变了人们的出行方式,微电网正在改变着能源结构,电动汽车也在快速进入人们的日常生活。高校在这方面的教研步伐必须要跟上当前的发展需求。硬件在环(HIL)技术在工业电力电子与电力传动领域越来越受到重视,广泛应用在微电网研究、汽车控制器研发等领域,实现了先进控制算法快速验证和产品控制器的快速研发[1-4]。
文献[5]中采用RT-LAB搭建船舶电力系统逆变器并联HIL控制结构;文献[6]中广汽集团采用dSPACE设计了双转子电机的HIL实验平台,改善测试调节和实验依据;文献[7]中搭建了基于RTDS的电力系统联合实时仿真HIL系统,用于分析电力系统稳定性控制;文献[8]中一汽集团采用NI硬件搭建HIL系统,并将其应用到整车系统,测试效率大幅提高,并且降低了汽车售后的电气故障发生率和返修率;文献[9]中基于NI PXI 设计了BMS硬件在环测试系统,确保BMS产品设计过程的安全性、稳定性和可靠性分析。
但是,当前高校配合电力电子与电力传动教学的HIL技术实验平台研发较少。为加强学生创新能力培养,本文研制了基于DSP28335控制器的电力电子与电力传动HIL教学实验平台。该平台采用NI实时仿真器负责运行实时主电路模型,Starsim软件将模型导入仿真器中。采用MATLAB/Simulink代码生成技术,将仿真控制算法快速生成控制代码,利用CCS软件将生成的控制算法,下载到DSP28335控制器中,实现对主电路模型的控制。验证仿真控制算法在实际控制中的性能,消除在实际控制中存在的缺陷,并测试极端情况、故障情况下控制器的功能是否完善。减少算法二次编程及验证时间,提高先进算法在电力电子与电力传动系统控制中应用的效率,方便学生快速设计复杂电力电子系统。DSP28335控制器测量资源丰富,可以实时观察控制器的运行情况,方便学生理解控制算法机理,实验过程安全。该实验平台不仅可以提高学生对电力电子与电力传动理论理解能力,还可快速提高学生的动手能力和科研能力。
1 电力电子与电力传动DSP-HIL平台设计
1.1 平台拓扑结构
电力电子与电力传动DSP-HIL平台的拓扑结构如图1所示。实验平台由PC上位机、DSP控制器和NI仿真器组成。DSP控制器运行电力电子与电力传动系统控制算法;NI仿真器运行电力电子与电力传动系统的功率电力部分;PC上位机实现电力电子技术算法的研究和电力电子功率电路的搭建,并负责为DSP下载控制算法,为NI仿真器下载功率电路。
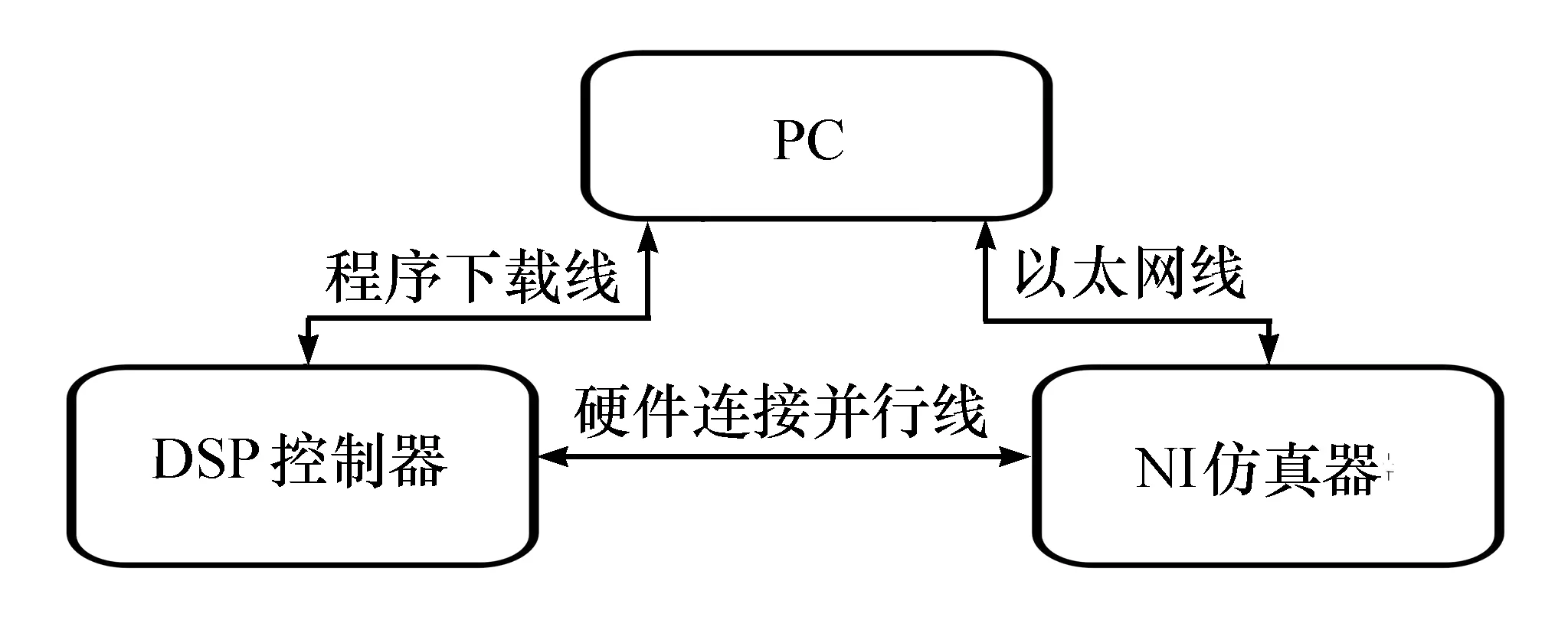
图1 平台的拓扑结构
1.2 平台软硬件组成
电力电子与电力传动DSP-HIL教学实验平台软硬件组成如图2所示。PC上位机与平台相关的软件有MATLAB/Simulink、CCS和Starsim软件;DSP28335控制器硬件由片上资源和片外资源构成;NI实时仿真器由PXI实时控制器和FPGA卡组成。
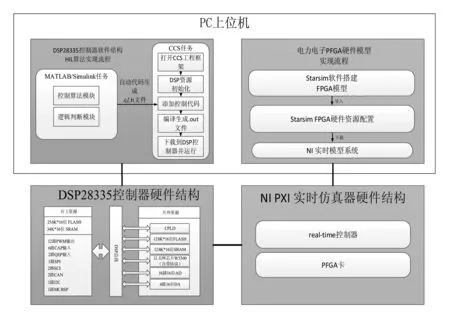
图2 平台软硬件组成结构
PC上位机主要实现两部分功能,一为对DSP28335进行程序的编译和下载,二为对NI实时仿真器搭建电力电子系统FPGA实时仿真模型。在第一部分功能里,为了使学生更好地利用代码自动生成技术,快速实现控制算法的应用,在实现DSP28335程序之前,首先利用CCS软件搭建程序框架,然后利用MATLAB/Simulink编写控制代码,并且自动生成.c程序,加载到CCS程序框架中,如图3所示。然后编译下载到DSP28335中,实现DSP算法与仿真中控制算法一致。第二部分功能则利用Starsim软件搭建FPGA硬件电路。

图3 自动代码生成
DSP28335被广泛应用于当前的电力电子控制领域。为使学生与实际工程应用更快接轨,本文采用DSP28335控制器作为主控单元,控制速度与精度符合当前工程应用需求。采用DSP+CPLD架构使控制器资源更加丰富,提高控制器灵活性及利用率。采用代码生成技术,编程方式简单,使学生将注意力更多集中于对算法的研究。
采用NI实时仿真器搭建实际电路结构,而仿真器采用PXI实时控制器+FPGA板卡架构实现。FPGA板卡负责运行主电路结构,以及模拟量数据输入输出、PWM波形接收和编码器等快速信号处理。PXI实时控制器负责将上位机送来的电路结构传递到FPGA中,并且实时监测系统参数,通过示波功能反馈给学生,使学生更加直观地理解主电路内部运行情况。
2 实验平台搭建与实验
2.1 电力电子与电力传动DSP-HIL平台搭建
实验平台的外观如图4所示。
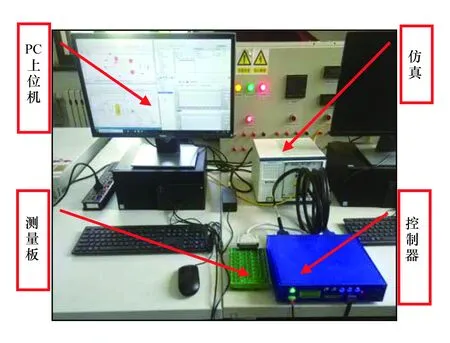
图4 实验平台外观
(1) NI PXI仿真器由NI PXI 1071机箱、NI PXI 8840控制器和NI PXI 7868R FPGA板卡组成。上位机Starsim软件通过以太网线与仿真器通信,利用Starsim软件为仿真器下载主电路部分,并监控电路状态。
(2) 自主设计的DSP控制器主控制单元采用TI DSP28335芯片,CPLD芯片为DSP进行功能外扩,数据AD采集采用外部高精度采样芯片,采样速率200 kHz,外扩以太网通讯接口,方便接入互联网。还设计了符合NI仿真器的硬件接口,减少不必要的跳线连接。如图5所示。
(3) 测量板将模拟量采集信号和PWM输出信号引出,方便外接示波器观察控制测试的实时变换情况。
2.2 DSP-HIL教学实验案例
利用电力电子与电力传动DSP-HIL教学实验平台,搭建了一个永磁同步电机控制系统,用Starsim软件搭建电力电子主电路部分,用Simulink软件实现控制算法。如图6所示。

图5 DSP控制器内部结构

图6 主电路搭建与控制算法实现
图7所示为转速正反转切换过程,可观察转速变化情况和电流变化情况。

图7 转速正反转切换过程
图8为电机突加6 Nm负载时,转矩、转速和电流的变化情况。
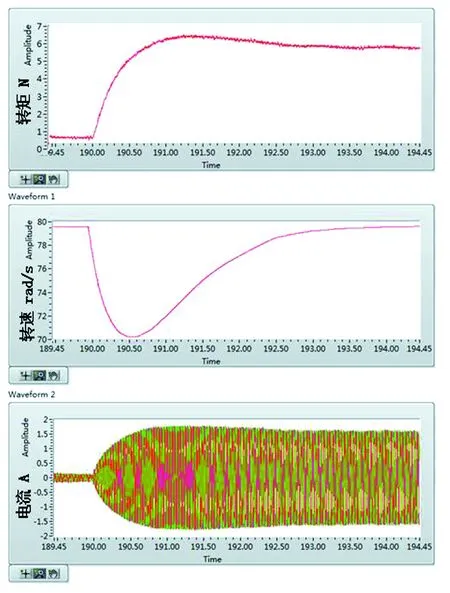
图8 电机突加6 Nm负载转矩
3 结语
为提高电力电子与电力传动实验教学水平和教学效果,设计了基于DSP28335的电力电子与电力传动DSP-HIL实验教学平台。该平台利用自动代码生成技术,快速将理论与实际结合,提高学生理解能力。利用DSP28335控制器的丰富资源,可以开发更多实验资源,如电力电子变换器控制、电机控制、风力发电控制、光伏发电控制、储能变流器控制等。该实验平台配合理论课教学,将有利于学生创新能力的培养。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
物流技术与应用(2020年4期)2020-05-06
中国计算机报(2020年9期)2020-03-25
中国自行车(2018年8期)2018-09-26
铁路计算机应用(2018年4期)2018-05-03
制造技术与机床(2017年6期)2018-01-19
北京航空航天大学学报(2017年1期)2017-11-24
制造技术与机床(2017年3期)2017-06-23
通信电源技术(2016年5期)2016-03-22
舰船科学技术(2015年8期)2015-02-27
