机器人表现力与主动性在交互中对用户的感知影响
2019-01-24 03:06冯诀宵
成都理工大学学报(自然科学版) 2019年1期
冯诀宵
(武汉理工大学 信息工程学院,武汉 430070)
机器人系统,特别是家用机器人,在我们的日常生活中变得越来越普遍。随着家用机器人不断融入我们的家庭生活和工作空间,我们与它们的互动和协作也逐渐增多。但是,C.Breazeal等[1-2]指出,当前机器人和人类在很多时候视对方为障碍而不是帮助,两者之间几乎没有互动和交流。此外,当人们与机器人协作来完成任务时,交互方式通常是非语言的。因此,为了让机器人能够有效地与人类用户一起工作,机器人需要在基于任务的活动中使用社交性但非语言的行为来进行协作和交流。J.Fink等[3]和O.Mubin等[4]研究表明,当机器人与人类用户一起工作时,主动性可能是一个影响工作效率的重要因素。在机器人和人类用户的社交互动方面,已经有了广泛的研究。其中以J.Fink为代表的一个分支探讨了机器人拟人化的使用,他们在研究中将拟人元素加入到机器人的动作当中[5]。H.Osawa等[6]研究了现有家用机器人对拟人特征的利用情况,发现拟人化的动作可以促进机器人与用户的顺畅沟通。然而,在基于任务的应用程序中使用拟人化的挑战之一是机器人的动作通常由任务决定,较难加入易被理解的社交动作。当设计师能为机器人添加的拟人化动作的范围很有限时,拟人化的方法就很难实现。
另一个研究分支更侧重于手势等不同形式的非语言交流。G.Haffman等[7]的研究表明大多数人对身体运动非常敏感。因此,通过对机器人动作的精心设计,机器人也能有效地与人类用户进行交流和沟通。D.Sirkin等[8]研究了遥现机器人屏幕内和屏幕外运动的使用,发现遥现机器人屏幕外的额外动作提高了用户对消息的理解,并增强了用户协作感。M.Sharma等[9]和D.Szafir等[10]研究了飞行机器人通过具有表达性的运动传达意图的能力。总而言之,机器人已经有能力通过不同的动作完成指定的具体任务,而我们希望探究通过增强、扩展这些动作让机器人拥有交流表达等功能的可能性和难点[11-13]。
因此,当前的研究重点是改善智能机器人的互动功能,特别是通过手势和其他形式的非言语交流[14]。在这项研究中,我们探索了人类用户与一组机器人抽屉之间的互动,让这些机器人抽屉与人协同工作以完成装配任务。实验控制了机器人抽屉的2个变量:表现力和主动性。对于第一个变量,我们将机器人分为“不具有表现力”的机器人(以下简称“非表现型机器人”)和“具有表现力”的机器人(以下简称“表现型机器人”)2类。C.Breazeal等[2]注意到机器人在提供有效沟通方面的表现力的重要性。在我们的研究中,将非表现型机器人定义为仅执行基本的实用性动作以帮助完成任务的机器人。相反,表现型机器人为了交流的目的能够进行额外的动作,甚至表达情绪[15]。对于第二个变量“主动性”,我们将机器人分为“被动型机器人”和“主动型机器人”2类。将被动型机器人定义为根据用户的手势响应并执行操作的机器人,而主动型机器人则预测用户即将发生的需求并启动完成任务的操作。为了探索这两个维度的影响,我们进行了一系列对照研究。
在之前的研究中,研究了如何设计非拟人机器人与人进行沟通的方式,尤其是交互式家具和电器。我们感兴趣的是机器人应该如何响应用户的行为和情绪。我们使用视频原型来探索人类用户(演员)和一组机器人抽屉之间的相互作用,通过手势等非语言交流方式,让人类演员和机器人各自展示了5种可能的情绪状态:愤怒、快乐、冷漠、悲伤和怯懦。然后,将这些视频发送到80位调查者手中,让他们回答了一系列关于交互感知的问题。调查结果显示人们更喜欢那些表现出与人类演员相匹配的情感的抽屉。
1 实 验
1.1 方法
我们的目标是评估家庭环境中的人如何与机器人互动,为此,我们使用绿野仙踪技术进行研究。一个远程操控员可以帮助我们在缺乏智能化系统的情况下模拟人与智能机器人的交互情感。A.Weiss等[16]已经证明了绿野仙踪在探索用户体验因素方面的有效性,并以此研究了人机交互中的最佳实践、用户接受度等问题。同样,J.Fink等[5]也使用绿野仙踪技术观察机器人如何与儿童互动,比如探索机器人如何鼓励儿童参与到家务活动当中。
1.2 机器模型
机器人抽屉模型由普通的抽屉进行改造,为了使抽屉能够执行一致且可重复的运动,前3个抽屉在齿轮和齿条系统上使用直流电机进行了改装。此外,安装在抽屉上的旋转编码器,使我们能够跟踪每个抽屉的位置。最底部抽屉包含驱动系统的零件和硬件。该驱动由Arduino微控制器控制,该微控制器通过USB电缆与本地客户端程序进行通信。
本地客户端程序为抽屉提供了一个绿野仙踪式的遥控器。相邻房间的人类“向导”可通过键盘热键远程操作抽屉原型(图1)。 向导UI呈现了15个按钮,每个按钮对应于预编程的抽屉动作序列。捕捉抽屉动作和参与者行为的音频、视频会单项传导给相邻房间中的人类“向导”,“向导”依据规则操控抽屉。

图1 实验设置Fig.1 The experimental setup
1.3 设计方案
这项研究旨在探索机器人的表现力和主动性如何影响人的感知。为了研究这个问题,我们用4种情景进行对比实验。每个场景的场景设置、任务流程都一样,但2个因素不同。第一个变量是抽屉的表现力。非表现型抽屉组的抽屉仅具备基本的打开和关闭动作,而表现型抽屉组的抽屉通过额外的动作表达了某种特定情绪。第二个变量是抽屉的主动性。在主动型抽屉组中,抽屉对下一步任务的预测,主动发起打开和关闭的动作。在被动型抽屉组,抽屉等待实验参与者的手势再行动。

图2 非表现型抽屉的动作序列Fig.2 The sequence of actions in a phenotype drawer
1.4 机器运动
非表现型抽屉仅使用最基本和功能性的动画来与参与者互动,其运动方式只有匀速打开和匀速关闭2种(图2)。对表现型抽屉,通过为其设计传达不同情绪或建议的动作来赋予抽屉表现力。动作设计基于G.Haffman等[7]的研究。表现型抽屉使用“摆动开启”的动作(图3-A)来示意用户将某件工具放回该抽屉,抽屉在打开前会小范围前后摆动。表现型抽屉还可以示意用户取走某件工具,打开的抽屉关闭一半并以半速重新打开(图3-B)

图3 表现型抽屉的提示动作序列Fig.3 The sequence of prompt actions in a phenotype drawer
另外添加了一些表达情绪的动作,比如用户完成某一个阶段性任务后执行的庆祝动作,以及当用户犯错时的偷笑动作。庆祝动作是3个抽屉模仿涟漪效果(图4-A)。偷笑动作是所有抽屉都打开到随机位置,摆动2次,然后关闭(图4-B)。

图4 表现型抽屉的情绪动作序列Fig.4 The sequence of emotional actions in a phenotype drawer
1.5 实验流程
被试的任务是组装一个踏脚凳,由10个支撑柱和2个支撑板组成,相互衔接部分涉及到不同的部件和工具,被试会有一套完整的安装流程和所需工具。参与者被告知完成这项任务所需的工具存放在3个抽屉里。每个工具的位置在抽屉内用标签纸注明,以便参与者可以将这些工具返回到固定的位置。
对于主动型抽屉组的被试人,我们告诉他们“抽屉将提供您所需的工具”;对于被动型抽屉组的被试人,我们将会告知“您可以向抽屉做出姿势以获取所需的工具”。另外,为了防止被试人一次性拿出所有工具而不和抽屉互动,每个被试人一次最多只能取出2个工具,并按照说明组装踏脚凳。 在按照指示完成后,被试人还将接受访谈和问卷调查。
1.6 向导操控者
在整个研究过程中,向导的任务是启动抽屉并在适当的时间执行操控抽屉执行一定的动作。如果被试人遵循安装说明,并严格遵守“每次只取出2个工具”的规则,向导需要执行至少8次工具交换(获取和归还),具体的交换方式取决于当前抽屉的表现力和主动性。
为了区别表现型抽屉和非表现型抽屉,向导必须在相应的条件下按规则操控抽屉发生动作。在非表现型抽屉组中,当被试人需要从抽屉中取出或归还工具时,向导操控抽屉执行基本的打开和关闭动作。但是,对表现型抽屉,当需要取出或返回一个工具时,向导使用摆动开启动作打开应当被打开的抽屉。此外,向导会操控抽屉表达某些情绪:如果被试人犯了一个错误,例如掉了一个紧固件或拿起错误的工具,向导会使用抽屉的偷笑动作。此外,被试人完成一个阶段时,抽屉会启动庆祝动作。
为了区别主动型抽屉和被动型抽屉,我们改变了抽屉行为的时间。对于主动型抽屉,根据被试人完成的安装步骤,当他需要一个工具时,抽屉会做出预测,并提前打开所需工具所在的抽屉。当被试人拿走工具时,向导自主关闭抽屉。如果被试人已经拿了2个工具并且需要第三个工具,则向导会打开需要被放回工具应当归还的抽屉,示意被试人归还一个暂时不需要的工具。在被动型抽屉组实验时,抽屉仅根据参与者的手势打开和关闭。因此,参与者需要向抽屉指出他们想要打开哪一个。然后,抽屉保持打开,直到参与者指示它关闭。
1.7 问卷调查
为了评估被试人如何看待与抽屉的交互过程,我们调整并利用了迪拉德关系消息量表[15]。所包含的关系因素是亲密性、相似性、支配性和平等性。我们根据上述因素设计了26个关于与机器人交互的陈述,依照七点李克特量表(1=非常不同意,7=非常同意),让被试人回答他们对这些陈述同意的程度。此外,通过访谈收集了所有被试人在与机器人交互过程中的心理感受。
2 结果分析
首先将调查答复导入R进行统计分析。使用双向方差分析检验来确定主动性变量或表现力变量是否对被试人与机器人交互中的感知具有显着影响。接下来我们将分析一些在主动性变量或表现力变量上形成显著差异的问题答案。
2.1 亲密性
通过询问了一系列关于被试人与抽屉间亲密感的问题,这些问题主要反映的是被试人在交互中的参与感。与非表现型抽屉相比,被试人认为表现型抽屉更加投入(图5)。在被问到“抽屉是否觉得与我互动很有趣”这一陈述时,表现型抽屉显著地比非表现型抽屉具有更大的认同度(表1),但总体而言积极性不会对亲密性的感知产生显著的差异(表1)。

问题主动性表现力抽屉觉得与我互动很有趣F(1,16)=1.28P=0.287F(1,16)=19.88P<0.01
2.2 相似性
关于相似性的问题与交互的友好体验有关。与亲密性一致,表达型抽屉被认为比非表现型抽屉更易亲近和更友好。通过对“抽屉似乎希望进一步互动”的认同程度的调查,可以发现表现型动作的抽屉与被试人之间具有更大的相似性(图6)。 与亲密性一样,主动性变量似乎不会对相似性产生显著差异(表2)。

表2 相似性调查结果Table 2 Similarity survey results
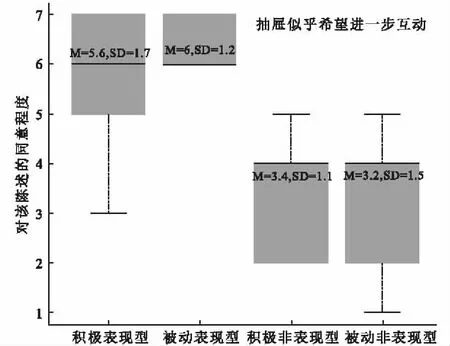
图6 相似性因素Fig.6 Diagram showing similarity factor
2.3 支配性
支配性相关的问题有助于确定交互中的交互双方对地位的感知。 可以看到,无论是表现性还是主动性都会导致抽屉展现出更强的主导性和影响力(表3)。 对于主动型变量,这似乎很好理解,因为主动型抽屉总是在预测下一步操作,起着主导作用,并且在被试人犯规的时候强制其按照规定进行。而对于表现型抽屉,被试人会觉得具有表现力的动作在试图引起他们的注意,从而对他们施加影响。表现力在“抽屉试图控制我”(图7-A)和“抽屉没有试图影响我”(图7-B)的问题上表现出很大的差异。 请注意,“抽屉不试图影响我”的问题是反向编码的,值越大表示更多的支配性。

问题主动性表现力抽屉试图控制我F(1,16)=3.42P=0.079F(1,16)=6.62P=0.019抽屉没有试图影响我F(1,16)=18.6P<0.01F(1,16)=26.3P<0.01
2.4 平等性
平等关系描述了被试人是否认为他们在相同的地位下受到对待。尽管在支配性因素的结果中,表现性有显著影响;但表达性对平等性因素似乎没有显著影响。相反,主动性产生了非常显著的差异。关于“抽屉认为我们是平等的”的陈述,与被动型抽屉相比,主动型抽屉让被试人产生了更大的不平等的感觉(图8)。 被试认为,主动型抽屉并没有将他们视为平等的,而表现型抽屉则没有产生这种感受(表4)。

图8 平等性因素Fig.8 Diagram showing equality factors

问题主动性表现力抽屉认为我们是平等的F(1,16)=8.25P=0.015F(1,16)=0.026P=0.912
3 讨 论
本项研究表明,表现力和积极性会对机器人与人的交互感知产生巨大影响。通过研究后的访谈,我们发现被试人能够理解机器人行为的意图和信息,被试人知道抽屉正试图通过动作来提醒他们拿走或返回工具,从而引导他们进入下一步。然而,很多被试人表示希望按照自己的节奏完成任务,因此,受试者经常忽略机器人的建议。此外,看到支配性因素中,主动性和表现力之间存在互动效应。但主动型抽屉使被试人感到机器人没有将他们视为平等的。在问卷后的访谈中,有的被试人表示机器人像“老板”一样,将被试人降低到较低的社会地位;另一位被试人表示“抽屉打乱了我本身的节奏”。相反,当机器人同时具有表现力和主动性时,这种不平等的效应降低了。因此,通过增强表现力,机器人可以在不降低参与者平等感的同时引导两者之间的互动。在实际设计生产过程中,机器人不适宜的沟通方式会让人类用户产生不适或反感。
表达性的动作对沟通有效性的提高。总体来讲,被试都能回忆起表现型抽屉偷笑,他们这个时候一般都没有在看抽屉(根据录像显示)。很大一部分能回忆起“抽屉试图向我表示祝贺”或“它提醒我犯了一个错误”。即使没有直接看抽屉,被试人仍然能够回忆起抽屉所传达的信息。这一发现再次证实了霍夫曼的论点,即人类对运动很敏感,精心设计的小动作可以用于提升交流的有效性[7]。
此外,从视频中还发现,由于没有明确指示被试人应该如何与抽屉互动,被试人会使用各种不同的手势与抽屉进行交流,包括触摸、挥手、敲击等等。 除了打手势之外,一些参与者甚至尝试与抽屉交谈。 值得注意的是,参与者很快就会创建一个如何与抽屉互动的心理模型,并且不会尝试新的手势或动作。
存在的不足之处是数据样本量较少,导致整个系统性的结果并不十分完善,今后的工作将继续扩大样本量,进行统计分析对比。
4 结 论
本文的研究表明,让机器人的动作具有表达性会影响用户对交互的感知。与功能更强大的非表现型机器人相比,表现力使机器人看起来更加投入,并对人感兴趣,更好进行合作。主动性似乎对与机器人的协作没有显著影响,但是被动而富有表现力的机器人确实对人类用户来说更易于相处。此外,主动型机器人似乎比被动型机器人更能产生支配感,甚至让人感到被不平等地对待。发现表现力的加入可以帮助缓和这种感觉,因为富有表现力的机器人看似在引导两人的互动,但不会产生支配的影响力。
猜你喜欢
都市(2022年1期)2022-03-08
河北画报(2021年2期)2021-05-25
小学生学习指导(高年级)(2021年4期)2021-04-29
少儿美术(2021年5期)2021-04-26
河北画报(2020年8期)2020-10-27
小学生学习指导(低年级)(2020年6期)2020-07-25
新课程·下旬(2018年9期)2018-11-14
数学大王·趣味逻辑(2018年2期)2018-01-27
考试周刊(2018年2期)2018-01-06
试题与研究·教学论坛(2017年28期)2017-11-29