一种用于生物雷达参考的生命信号同步测量系统研制
2019-01-18 11:44:58宋慧浩张自启祁富贵王鹏飞王健琪
医疗卫生装备 2019年1期
宋慧浩,张自启,殷 悦,祁富贵,王鹏飞,王健琪,吕 昊*
(1.空军军医大学军事生物医学工程学系,西安 710032;2.联勤保障部队第983医院,天津 300142)
0 引言
生物雷达是一种以生命体(人体或动物)为探测对象的新型雷达技术,它以特殊雷达发射的电磁波为探测媒介,能穿透衣物、树丛、墙壁、废墟等非金属遮挡物,非接触获取人体目标信息,在军事、公共安全、生物医学等领域有着广泛的应用前景,如在城市巷战中穿墙探测建筑物内隐藏的敌人、地震等自然灾害发生后搜寻压埋在建筑废墟下的幸存者、临床上烧伤等特殊患者生理信息的非接触监测等[1-9]。
作为一种新型的非接触生命探测技术,对生物雷达技术开展研究常常需要评估探测结果的可靠性与准确性。国内外文献表明,生物雷达实验结果的评价可分为2类:一类是根据人体呼吸、心跳频率范围的先验信息进行判断,通常是观察处理后回波的功率谱峰值频率是否与先验信息一致[1,4,7];另一类是在生物雷达探测的同时对人体呼吸、心跳等生命信号进行同步测量,并将该测量结果用于参考[10-17]。显然第一类评价方法主观性较强,仅能用于生物雷达探测结果的定性评价,如验证系统可行性、判断有无目标等。随着生物雷达技术的发展,同步测量方法成为开展相关研究的一种必要手段,如基于生物雷达的多人体目标识别[10]、心率变异性分析[11]等都需要参考信号来定量分析生物雷达检测结果的可靠性与准确性。因此,研究一种人体呼吸、心跳等生命信号的参考测量方法或系统,可以为生物雷达实验探测结果提供定量的标准和参考,对于生物雷达技术的研究具有重要意义。
为此,Lv等[12]在生物雷达探测实验中采用人工计数的方法,即在探测过程中由被测对象默数自己呼吸的次数,然后将计算出来的呼吸率作为生物雷达探测结果的参考,这种方法简便易行但精度有限;胡治等[13]和Lu等[14]采用了多导生理记录仪来同步测量人体的呼吸和心电信号(electrocardiograph,ECG),并利用该仪器提供的数据分析软件提取所需的呼吸和心电参数与生物雷达探测结果进行对比分析;Patwari等[15]则采用了临床上呼吸监测的金标准——呼气末二氧化碳监测仪来同步测量呼吸率;此外,Suzuk等[11]采用了心电传感器(ECG电极)结合AD采集模块开发同步测量系统,为生物雷达检测到的心跳信号提供参考;而Li等[16]和Baboli等[17]采用了指尖佩戴式的光电传感器来同步测量人体脉搏波并将以此计算出来的脉率作为心率的参考,其中Baboli等[17]还采用胸带式呼吸传感器同步测量了实验对象的呼吸。
综上所述,目前用于生物雷达探测的参考测量系统均采用接触式方法检测人体呼吸、心电、脉搏等信号,采用ECG电极、光电传感器等小型接触式传感器开发的系统在成本、体积、质量等方面更具优势。然而接触式传感器在与生物雷达系统同时测量时存在时间同步的问题——在计算机上控制2种系统开始/停止保存数据时总有先后顺序,从而导致两者测量得到的人体生命信号数据存在时间误差。
因此,本文提出了一种用于生物雷达参考的生命信号同步测量系统,该系统采用小型化接触式传感器分别测量人体呼吸和脉搏(用于心跳的参考),传感器前端和控制显示后端采用无线蓝牙连接,且后端软件基于Windows消息机制实现与生物雷达系统软件的时间同步,具有低成本、可便携、通用化的特点,不仅可为实验室内外、多目标探测等多种场景的生物雷达探测实验提供定量标准和参考,还可为生物医学研究中生命信号的定量检测提供一种简便易行的通用方法和手段。
1 系统整体架构
该同步测量系统由传感器前端和控制显示后端2个部分组成,其整体架构如图1所示。其中传感器前端包括多个接触式传感器组,每组由1个定制的压电式呼吸传感器和1个光敏式脉搏传感器组成,可用于多人体目标探测。控制显示后端由计算机和蓝牙路由器组成,后者采用蓝牙4.0标准与前端无线连接,在该标准中:(1)工作频率范围为2.402~2.480 GHz;(2)无线通信距离最远可达100 m;(3)信道容量为1 Mbit/s。根据传感器参数(呼吸传感器采样频率50 Hz、脉搏传感器采样频率200 Hz,采样数据精度均为8 bit)可知,1组传感器传输带宽需要2 Kbit/s(200 Hz×8 bit+50 Hz×8 bit),因而 1 Mbit/s的信道容量最多可连接512组传感器,但受限于蓝牙微网的3 bit地址长度(其中000编码已被蓝牙自身占用),实际最多可同时接收7路数据,即最多连接3组呼吸、脉搏传感器用于3个人体目标测量。此外,后端计算机上运行同步测量软件,同时连接生物雷达并运行该系统。
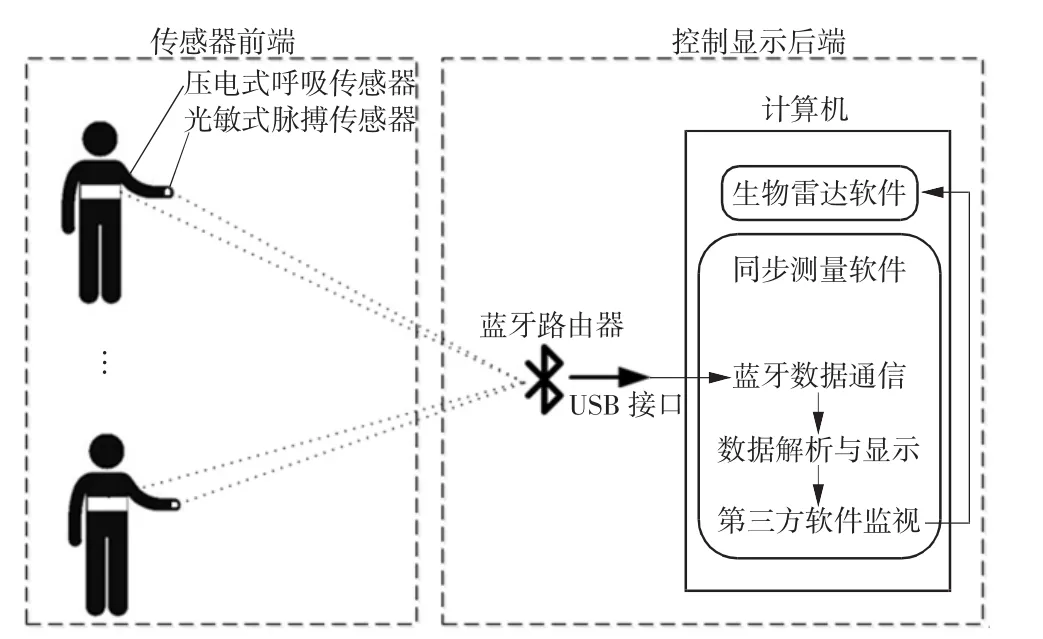
图1 系统整体架构图
2 传感器原理与参数
该系统前端呼吸传感器[如图2(a)所示]采用聚偏氟乙烯高分子膜压电材料检测呼吸时人体体表产生的收缩和舒张压力变化,产生mV级的微应变电信号,经过内置信号调理电路后输出呼吸波形数据,使用时配合弹性绑带束缚在人体胸/腹部进行测量。脉搏传感器[如图2(b)所示]利用红外线对射式指夹,通过主动发射和接收870 μm波长的红外线检测心脏活动引起的手指末梢血管容积变化,然后通过放大、信号调理等输出脉搏波信号。这2种传感器均向相关企业定制(型号 HKG-11L、HKG-07L),除基本的传感测量功能外,已内置AD采集器、串口蓝牙适配器、供电等模块,具备体积小、质量轻、方便使用的特点,其主要技术原理和参数见表1。

图2 前端传感器实物图

表1 传感器技术原理和参数
3 系统软件设计
在同步测量系统设计中,核心问题是该系统与生物雷达系统开始/停止保存数据的时间同步。为此,本文采用Windows平台下的软件设计,以Windows消息传递机制为基础,通过实时监视生物雷达系统软件的工作状态,实现2种系统数据采集的同步。同步测量系统软件的基本流程如图3所示:(1)利用蓝牙适配器的USB转串口功能,采用串口通信技术建立蓝牙数据通信链路。(2)根据不同传感器数据包的帧头提取多路呼吸和脉搏数据,进行相应的预处理后显示各路数据波形和参数。(3)利用Hook(钩子)技术建立第三方软件监视器,即利用钩子捕获生物雷达系统软件的事件消息——当监测生物雷达开始/停止保存数据的事件时,立即触发同步测量系统开始/停止保存数据,从而实现两者测量数据的时间同步。上述流程中,生物雷达系统软件被当作第三方软件,只需了解其开始/停止保存数据的相关控制信息(如所需点击按钮的名称),就能监测到生物雷达开始/停止保存数据的事件。因此,该同步测量系统软件即使针对不同的生物雷达系统软件进行使用,也不需要重新设计代码,从而保证了通用性。
3.1 蓝牙数据通信——串口通信技术
蓝牙路由器在收发蓝牙无线数据的同时还起到了USB转串口的作用,因此采用串口通信技术读写该适配器对应的虚拟COM口(串行通信端口)即可建立系统的数据通信链路。目前在Windows平台下实现串口通信通常包括使用第三方控件、Windows API函数和其他串口通信程序3种方法。本文使用第三方SPCOMM控件提供的与串口通信相关的属性、事件和操作来实现系统前端传感器与后端显示控制的无线通信。为此,本文在同步测量软件中使用了6个SPCOMM控件,每个控件对应1个传感器,共计3组呼吸和脉搏传感器组;然后,对串口进行初始化,设置SPCOMM控件的控制对象(虚拟COM口号)和属性;采用事件驱动方式来实现数据传输,即当该虚拟COM口接收到数据时触发控件的OnRecieveData事件,在该事件中读取缓存中的数据包后对其进行解析和显示。表2列出了软件中SPCOMM控件的主要属性设置情况。

图3 同步测量系统软件的流程图

表2 SPCOMM控件的主要属性设置
3.2 数据解析和显示——多线程技术
通过无线蓝牙数据链路读取传感器前端发回的数据包后,本文采用多线程技术实现数据的解析和显示,即在串口通信线程之外建立新的线程对数据进行读取、预处理和显示,以确保数据通信的优先级和实时性。由于这2个线程都是对同一数据进行读写,本文在多线程编程中采用了临界区(CriticalSection)来缓存数据,从而有效避免多个线程同时访问同一数据时破坏数据完整性的问题。此外,本设计在读取前端传感器数据时利用了定制传感器规定的数据包格式,可以自动从数据包头中识别传感器类型,便于后续波形数据的预处理。
呼吸和脉搏传感器波形数据的预处理流程如下:首先,采用滑动减平均的方法校正波形中可能存在的基线漂移[12];然后,采用低通滤波处理以提高信噪比,其中对呼吸数据采用0.5 Hz截止频率的低通滤波器,对脉搏数据采用2 Hz截止频率的低通滤波器;最后,采用短时傅里叶变换来估计呼吸率/脉率[16]。
3.3 第三方监视器——Windows钩子技术
钩子是Windows系统中非常重要的消息机制和接口,可以用来监视系统或进程中的各种事件消息,截获发往目标窗口的消息并进行处理。因此,本文通过同步测量系统软件安装自定义的钩子,监视系统中特定事件的发生(如生物雷达系统软件开始/停止保存数据按钮的鼠标点击事件)来实现同步测量系统和生物雷达数据采集的时间同步。在实现这一设计过程中,本文主要考虑了以下4个方面:
(1)不同生物雷达系统软件开始/停止保存数据按钮定义有所差别。例如有“开始”“开始采集”或“开始保存”,同步测量系统软件在安装钩子前需指定第三方软件开始/停止保存数据按钮的相关信息。
(2)生物雷达系统软件存在不是通过点击按钮来开始/停止保存数据的可能。因此同步测量系统软件在安装鼠标钩子的同时还安装了文件监视钩子,即生物雷达系统软件开始保存数据时必然触发某一路径下文件的操作事件,此时同步测量系统软件可通过该事件实现同步数据采集。此外,通过文件监视钩子还可以自动获取生物雷达数据的文件名,以此来为同步测量系统保存的数据文件命名,便于实验后2种数据的对照分析。
(3)生物雷达与同步测量系统软件实际运行时分属不同进程。由于各进程地址空间彼此相隔,导致前者无法直接调用后者进程地址空间的钩子函数,因而采用全局钩子,即将钩子函数建立在dll(dynamic link library)文件中,从而实现多个进程共享。
(4)全局钩子dll必须与同步测量系统软件和生物雷达系统软件共享事件类型、开始/停止的相关信息、文件路径和文件名等参数信息。为了保证dll中的这些信息对其他进程的可见性,本文采用内存文件映射技术,即在dll中定义特殊的内存段来保存这些参数变量,从而实现了有效的参数传递。
3.4 系统软件界面
同步测量系统软件界面如图4所示。该界面可分为5个部分:(1)标题和退出按钮部分;(2)控制部分,主要用于配置蓝牙通信、选择是/否同步、选择存储路径、指定第三方软件开始/停止保存等相关信息;(3)蓝牙路由器状态显示部分,通过调用外部蓝牙控制程序实现,用于观察当前连接的传感器前端的各个传感器及其通信情况;(4)波形显示部分,最多可显示6个传感器,即3组呼吸和脉搏传感器组的波形数据;(5)状态栏部分,用于显示程序运行过程中的提示和错误信息。

图4 同步测量系统软件的界面
4 实验与结果
4.1 与超宽带(ultra-wideband,UWB)生物雷达的同步探测实验
本文使用课题组前期研制的UWB生物雷达系统配合本文的同步测量系统开展了实验。在实验中一位22岁健康成年男性志愿者作为探测目标位于约30 cm厚单砖墙后2 m处保持坐姿并平静呼吸,雷达天线在砖墙另一侧紧贴墙壁(天线离地面高度约1.2 m)正对目标探测,目标胸部佩戴本文研制系统同步测量呼吸,时长约1 min。UWB生物雷达和同步测量数据均采用MATLAB软件进行处理和分析。其中,UWB生物雷达只选用通道2的数据,并对其在时间上采用基线校正、低通滤波后选取所有距离点上的能量最大值作为探测波形。同步测量数据经过采样率分数倍变换后(由50 Hz变为64 Hz)与生物雷达回波数据采样率保持一致并采用3.2章节中的预处理算法进行处理。实验结果如图5所示,该UWB生物雷达测得的时域波形与同步测量系统基本一致,且频域波形显示两者对应的呼吸率完全相同,从而验证了生物雷达探测结果的正确性。
4.2 与点频连续波(continuous wave,CW)生物雷达的同步探测实验
本文将上述同步测量系统与实验室正在研制的CW生物雷达系统一起开展了同步测量实验。如图6所示,CW生物雷达系统采用点频CW体制,发射信号频率24.15 GHz,在硬件设计上采用直接下变频解调和收发共用微带天线,具有结构简单、小型化的特点,拟研制用于家庭和临床中患者呼吸等生理信息的非接触监测。在实验中一位22岁健康成年男性志愿者作为探测目标位于生物雷达前方约1 m处保持坐姿并平静呼吸,雷达天线正对目标胸部,目标同时佩戴本文研制系统同步测量呼吸和脉搏,时长少于2 min。为便于结果分析和显示,生物雷达和同步测量数据存入计算机并用MATLAB软件进行分析,采用与上述相同的预处理算法进行处理。
实验结果如图7所示,CM生物雷达系统与同步测量系统测得的呼吸波形基本一致,但两者测得的心跳/脉搏波形存在显著差别——生物雷达系统测得心跳波形的节律性明显不如作为参考的脉搏波形。这表明采用直接下变频解调导致人体回波信号中存在较强的呼吸-心跳互调[16],因此该生物雷达系统的人体心跳检测性能还需进一步提高。图8显示了少于2 min时长的人体呼吸率和心率(脉率)变化情况,以所研制同步测量系统为参考,该生物雷达系统呼吸检测准确率较高,但心跳检测准确率存在较大误差,这与图7所示结论一致。

图5 UWB生物雷达与同步测量系统的呼吸波形测量结果

图6 CW生物雷达原理框图

图7 CW生物雷达与同步测量系统测量结果
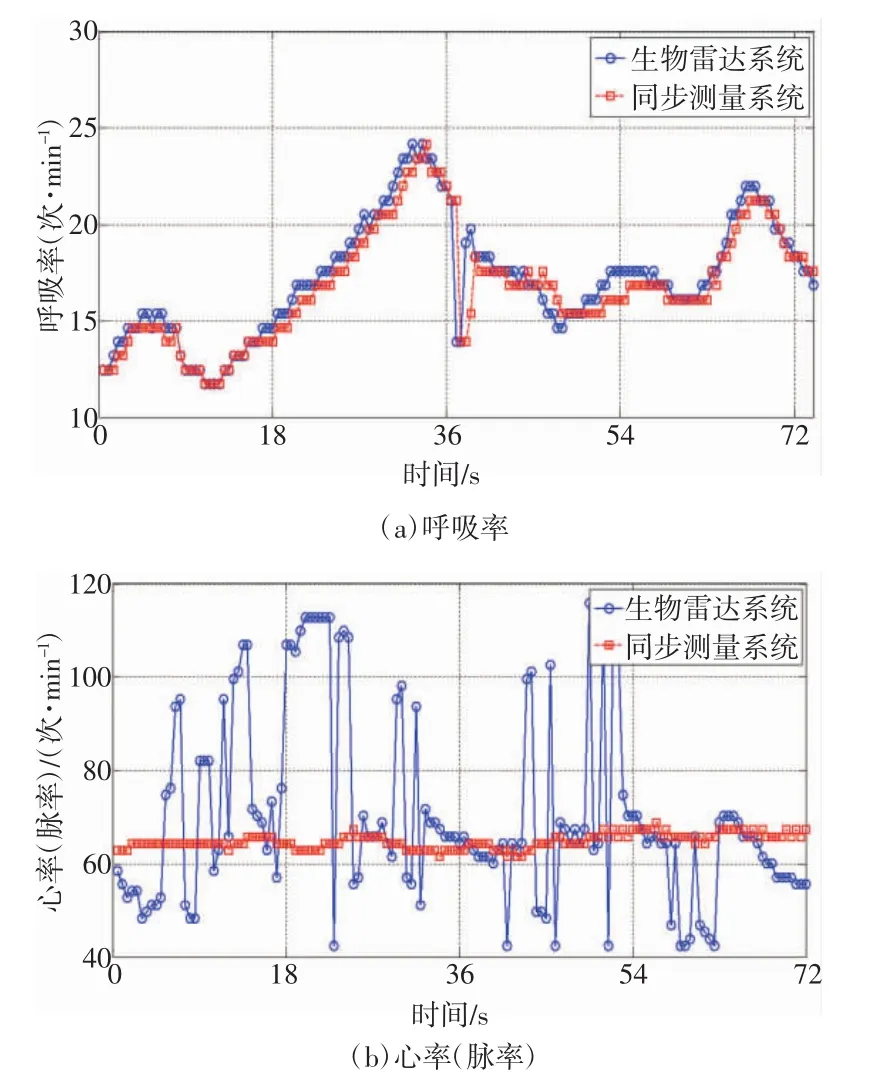
图8 少于2 min时长的CW生物雷达与同步测量系统估计结果
5 结论
生物雷达是一种以人体为主要探测对象的新型雷达技术,对其开展研究常常需要同时测量人体呼吸、心跳等生命信号作为参考,以评估生物雷达探测结果的可靠性与准确性。本文介绍了一种用于生物雷达参考的生命信号同步测量系统,该系统通过小型化接触式的压电传感器和光敏传感器分别测量人体呼吸和脉搏(用于心跳的参考),具有低成本和可便携的特点;采用蓝牙无线方式连接传感器前端和控制显示后端,能满足自由空间、穿透等多种场景的实验需求;其控制显示后端通过基于Windows钩子技术的软件设计实现与生物雷达系统开始/停止保存数据的同步,且不需要反复修改软件代码来配合不同生物雷达系统开展实验。结果表明,该系统有效解决了现阶段生物雷达参考测量系统的时间同步问题,不仅可为生物雷达探测实验提供定量标准和参考,还可为生物医学研究中生命信号的定量检测提供一种简便易行的通用方法和手段。下一阶段将使用该同步测量系统开展更多的生物雷达探测实验,并根据实验结果优化系统设计和软件界面。
猜你喜欢
工业设计(2022年7期)2022-08-12 13:18:58
金桥(2018年2期)2018-12-06 09:30:14
快乐语文(2018年15期)2018-11-29 10:23:17
家庭影院技术(2018年10期)2018-11-02 05:35:26
大众电视(蓝天下)(2018年8期)2018-10-26 01:00:30
家庭影院技术(2018年3期)2018-05-09 07:06:11
电子制作(2017年14期)2017-12-18 07:07:50
小朋友·快乐手工(2017年3期)2017-04-26 07:13:52
中华戏曲(2017年2期)2017-02-16 06:53:24
玩具世界(2017年8期)2017-02-06 03:01:38