基于无人机倾斜航空影像的树冠体积测算方法
2019-01-18 00:44于东海冯仲科
农业工程学报 2019年1期
于东海,冯仲科
基于无人机倾斜航空影像的树冠体积测算方法
于东海1,2,冯仲科3※
(1. 甘肃省测绘工程院,兰州 730000;2. 甘肃省应急测绘工程研究中心,兰州 730000; 3. 北京林业大学精准林业北京市重点实验室,北京 100083)
树冠是结构复杂的不规则体,对树冠体积的精确测定一直是树木测量研究中的难点问题。该文以消费级多旋翼无人机对目标树木进行倾斜摄影获取的多角度航空影像为基础,通过空三加密处理生成目标树木的三维点云模型;用等高线法分割树冠点云,并确定树冠最优分割层数;用投影法对点云数据进行转化,并选取测算点计算树高和树冠任意横截面积;对分割后各规则体的体积进行累加获得树冠体积。结果表明:8棵目标树木的树高测算值相对误差为1.46%~4.10%,平均相对误差为2.88%;树冠体积测算值的相对误差为6.95%~12.39%,平均相对误差为9.42%;精度均可满足林业调查中对于树高和树冠体积测量结果的要求。利用无人机倾斜航空影像建立单木的三维点云模型并进行树冠体积测算的方法是可行且有效的,该方法可为研究单木树冠几何参数的提取提供参考。
无人机;图像处理;林业;倾斜摄影;点云数据;单木参数提取;树冠体积
0 引 言
树冠指树木在地面以上连同其生枝叶的部分,是树木形态的重要组成部分。树冠体积指树冠轮廓以内所占的体积,是表征树冠三维空间大小的一项复合指标[1],也是监测树木生长状况以及估算树木生物量的重要依据。由于树冠具有结构复杂和形态不规则的特点,而树冠体积又是一个无法通过直接测量获取的复合因子,因此对于其值的精准测定较为困难[2]。
为了能准确高效地获取测量数据,研究人员尝试将测绘仪器和设备应用于树木测量中[3],通过建立相应的算法[4-6],获取树木的多种几何参数信息。现有的树冠体积测量方法,按作业方式不同可分为传统手工量测法、全站仪测量法和三维激光扫描法3种。传统手工量测法将冠幅和树高等数据带入已有经验模型中估算[7]而获得树冠体积,虽然工作效率较高,但作业方式粗犷且结果无精度保证。三维激光扫法获取的树冠体积虽然精度较高,但设备价格昂贵体积庞大不便于野外作业[8-10],且扫描获取的大量点云数据[11-13]处理难度较大、耗时费力[14-15]。全站仪测量法获取的树冠体积精度远高于传统手工量测法,逊于三维激光扫描法,但对野外工作条件的要求和成本造价[16]都远低于三维激光扫描法。
近年来,无人机(unmanned aerial vehicle, UAV)航空摄影测量[17]作为一项测绘新技术,在森林调查中的应用也越来越广泛。通过对无人机获取的高分辨率数字正射影像(digital orthophoto map, DOM)和数字表面模型(digital surface model, DSM)进行处理[18-19],提取冠幅、树高和株数密度等参数[20-22],再建立实地调查数据与影像提取数据之间的反演模型[23-25],实现对森林蓄积量、生物量和碳储量的估测[26-28]。可见,无人机航空摄影测量技术能够提取不同尺度的森林参数信息,将该技术应用于树冠体积测量中,与现有3种方法相比具有以下优势:1)能够快速获取树木的全方位、多角度影像,使树木的细节纹理得以清晰呈现;2)影像经过同名点匹配生成的点云数据量远小于三维激光扫描法获取的数据量,使得数据处理、分析更加易于操作;3)点云数据带有空间坐标信息,且能够清晰的展现树木的真实形态特征,克服了全站仪测量法不具备数据可视化的缺陷,使得各参数的提取计算更加直观快捷高效。
本文以消费级多旋翼无人机对目标树木进行倾斜摄影获取的多角度航空影像为基础,通过空三加密处理生成目标树木的三维点云模型,并对树冠点云进行投影和分割处理,提取树高和树冠任意横截面积,再累加求和获得树冠体积。旨在为利用无人机倾斜航空影像研究单木树冠几何信息的提取提供参考。
1 材料与方法
1.1 试验区概况
试验区位于北京市海淀区西北部的鹫峰林场。地理坐标为东经116°28¢00²,北纬39°54′00″,总面积832 hm²,海拔100~1 153 m。四季分明且温差较大,全年温度在-21.7~41.6 ℃范围内,年平均降水量628 mm。林场内植被丰富茂盛、林木种类较多,主要树种为油松()、侧柏()、毛白杨()、白蜡()、榆树()等。
1.2 数据获取
1.2.1 目标树木选取
通过实地踏勘,综合考虑无人机飞行作业条件及树木的大小规格,按照不同径阶分布[29](中径阶13.0~24.9 cm、大径阶25.0~36.9 cm、特大径阶≥37.0 cm,由于小径阶树木生长茂密,因而未能找到合适飞行作业的树木),选取试验区内8棵不同树种、树冠形状具有代表性的孤立单木作为目标树木(表1)。所选的目标树木须生长状况良好且与周边树木树冠无交叉和重叠,以确保无人机具有足够充足的飞行作业空间。
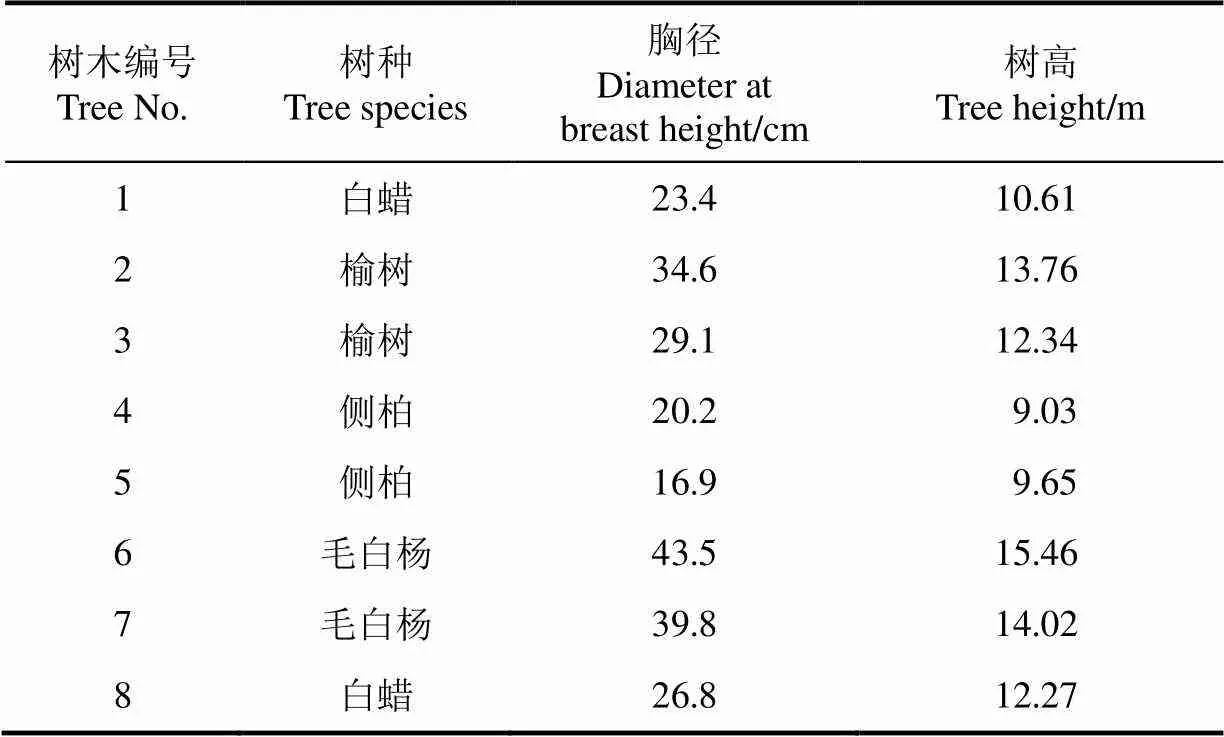
表1 目标树木的基本信息
1.2.2 无人机数据获取
数据获取时间为2017年2月至4月间天气晴好、风力较小的时段。数据获取平台为大疆Inspire-1型消费级多旋翼无人机,该机型将Zenmuse-X3型普通数码相机与云台集成为一体,配有主、副2个遥控器,飞行时会自动记录摄影瞬间像片的POS(position and orientation system)数据。无人机及相机的基本参数如表2所示。
使用该无人机采用围绕目标树木盘旋上升的飞行方式采集多角度倾斜航空影像(图1)。作业时,主遥控器控制无人机飞行状态,实现爬升、下降、悬停旋转及前后左右移动;副遥控器控制云台状态,实现相机在水平及垂直方位的多角度转动,并设置自动曝光间隔为2 s;主、幅遥控器同时协同配合,实现对目标树木的倾斜航空影像采集。
1)在保证安全距离的情况下,以目标树木的树干为中心进行近距离低速飞行摄影;
2)在盘旋上升的过程中实时调整相机姿态,以确保获取目标树木不同位置和不同角度的影像;
3)确保在同一高度采集的相邻影像重叠率超过90%,不同高度采集的影像重叠率超过60%。
依照此方案,手控操纵无人机分别对8棵目标树木进行倾斜摄影,共获取2 083张有效航空影像及对应的POS数据。

表2 无人机及相机的基本参数

图1 无人机倾斜摄影示意图
1.2.3 地面实测数据获取
依据冯仲科等[30]提出的方法,利用南方NTS-372R型免棱镜全站仪获取目标树木的实测数据。实测数据为树木不同位置处特征点的三维坐标。如图2所示,测量的关键步骤如下:
1)控制点布设。在目标树木周围采用独立坐标系布设控制点:以目标树木为中心,在其周围选择相互通视且大致等距的某3点、和作为控制点;设定某点的三维坐标为已知,在点架设全站仪并后视点,测量两点间的距离和坐标方位角以获取点的三维坐标;用支导线的方式,依次获取点和点的三维坐标。
2)树冠表面特征点获取。根据树冠的大致形态,从东、南、西、北、东南、东北、西南、西北8个方向上选取树冠特征点;特征点的位置需根据树冠的伸展情况和弯曲的趋势进行选取,一般取外凸和内凹相交处,即形态变化的转折点;将全站仪依次架设在3个控制点上,以碎部测量的方式分别测量获取这些特征点的三维坐标。
依照此方法,分别获取8棵目标树木的地面实测数据。

注: O为已知点;A、B、C为控制点。
1.3 研究方法
如图3所示,本文对无人机获取的数据进行空三加密处理,生成目标树木的三维点云模型;运用等高线法将树冠点云进行分割,并确定树冠最优分割层数;采用投影法将点云数据进行转化,并利用测算点分别获得树高和树冠任意横截面积的测算值;通过对分割后各规则体的体积进行累加,获得整个树冠体积的测算值;以全站仪实测值作为参考值,对树高和树冠体积的测算结果进行精度检验。
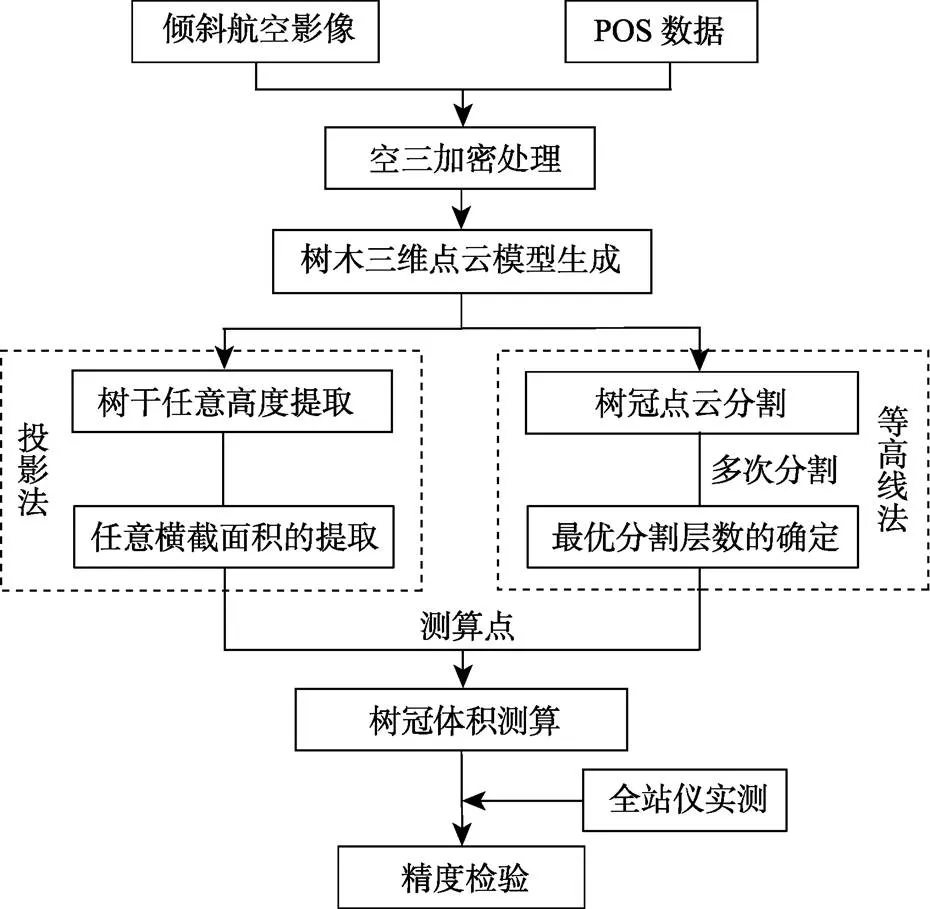
图3 无人机数据测算树冠体积技术路线
1.3.1 无人机数据处理
以Pix4D-mapper摄影测量软件为工具,分别对8棵目标树木的倾斜航空影像进行处理。以其中的6号目标树木为例对主要处理步骤进行如下说明:
1)空三加密
导入影像数据和POS数据,将参考系设置为WGS-84/UTM zone 50N坐标系,再导入相机检校参数文件,完成影像属性设置。通过空三加密处理后,软件自动恢复摄影瞬间每张影像的方位姿态。
2)点云生成
为了能在准确恢复目标树木三维形态的同时,又能避免因数据量过大而导致结果难以处理的问题,经过反复试验,最终确定将点云生成的“图像比例”参数设置为“1/2”,“匹配最低数值”设置为“3”,“点密度”设置为“中等”。
3)点云编辑与输出
利用人工手动框选的方式将生成的点云数据中地面、天空等多余噪声点删除,并输出目标树木的三维点云模型,其多角度视图如图4所示。以LAS和XYZ两种格式对包含坐标和颜色信息的点云成果进行输出,LAS格式的数据用于树冠点云的分割处理,XYZ格式的数据用于树冠点云的投影和筛选等处理。统计结果显示,6号目标树木三维点云模型成果的点云平均密度为482.67个/m3,共生成355 350个三维点。
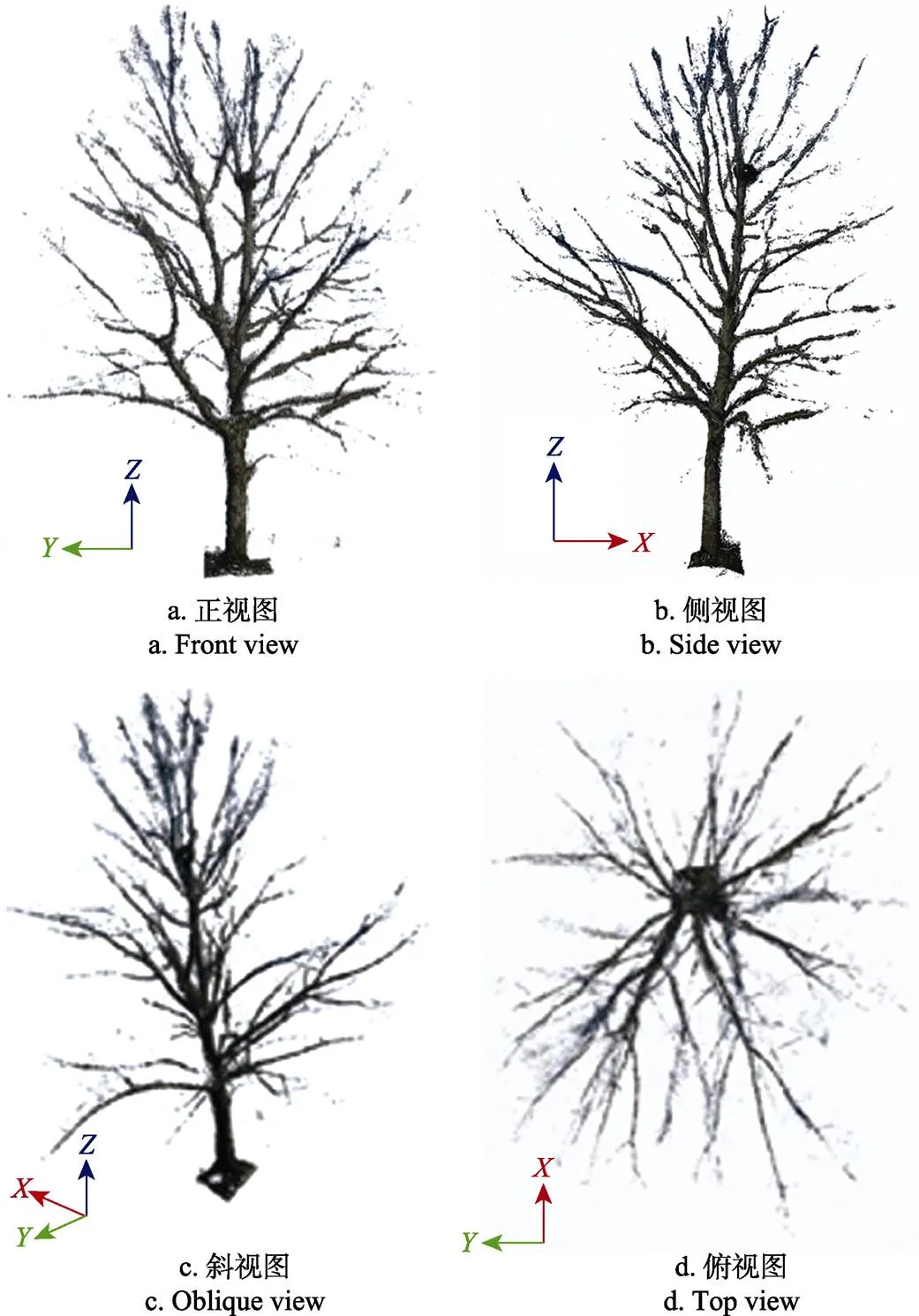
图4 树木三维点云模型
1.3.2 树冠体积测算方法
利用三维点云模型对树冠体积进行测算的基本思想是,将树冠分割为多层规则体来模拟树冠形态,然后求得树干任意高度和树冠任意横截面积两项几何参数,再按照规则体的体积公式分别计算各层的体积,最后进行累加求和获得树冠体积的测算值。
1)树干任意高度的计算
树干任意高度指树干上任意两点间的长度,实际上是解算这两点间的空间距离。树冠的三维点云记录了每个点的物方空间坐标,通过获取不同位置处的空间坐标信息,就能实现树干任意高度的计算。
式中表示高度,m;表示点号,取值为1, 2,…,。
2)树冠任意横截面积的计算
树冠任意横截面积的计算实际上是解算平面上各边界点的连线所形成闭合图形的面积。将树冠任一特定高度值的三维点云展绘到轴和轴构成的平面上,通过获取各边界点的平面坐标信息,就能实现树冠任意横截面积的计算。


式中表示面积,m2;表示点号,取值为2,3,…,。
3)树冠体积的计算
树冠体积的计算实际上是解算树冠分割后各层规则体的体积,进而累加求和得到树冠的体积。首先利用式(1)计算分割后各层的高度;其次利用式(2)计算分割后各层的横截面积;利用分层高度和横截面积计算各层规则体的体积:最后将各层规则体的体积累加求和获得树冠体积。
将分割后的树冠近似为由中间若干个台体和顶部及底部两个锥体构成,台体和锥体的计算公式分别为
式中表示截面号,取值为1, …,;其中,当表示台体截面时取值为2, …,1,当表示锥体时取值为1或;S、S+1分别表示第层和第+1层的横截面积,m2;H表示分割后相邻两层间的高度,m。
2 试验与结果分析
2.1 树干高度的提取
要从目标树木的三维点云模型上提取树干任意位置的高度,就要运用投影法将三维空间的点云数据转化至一维直线上。以XYZ格式的目标树木点云数据为基础,将轴和轴所构成的平面作为投影面,通过投影的方式转化至二维平面上;然后以树木根部点和顶点所在的直线为基准,绘制出树干的一维中心线;再在中心线上任意获取两个测算点的高程值,根据式(1)计算得到此段树干的高度。
如图5所示,以6号目标树木为例,在树干中心线上,提取出树木根部测算点所在直线的高程值为184.551 m,顶部测算点所在的直线的高程值为200.322 m,树干第一枝处测算点所在直线的高程值为188.500 m,由此可得到树高的值为15.77 m,树干第一枝下高的值为3.95 m,树冠(树干第一枝至树干顶部)高度的值为11.82 m。

图5 树干高度的提取
2.2 树冠体积的计算
1)分割方法
运用等高线法对树冠进行分割。等高线是对高程相等的相邻各点所连成的闭合曲线,而目标树木的三维点云模型存储了所有点的空间坐标,因此对树冠分割的过程实际上是筛选出点云中高程值相等的点的过程。
将LAS格式的目标树木点云数据导入到EPS软件(北京山维科技股份有限公司)中,选取树冠点云作为分割对象,将树干第一枝处测算点的高程值作为等高线的起算基准,通过“点云生成等高线”模块设置相应的等高距,生成树冠点云的等高线。等高距即为树冠的分层高度,等高线即为树冠的分割线。
2)树冠横截面积的提取
树冠点云被等高线分割后,落在同一等高线上的点都有相同的高程值,筛选出点云中有此高程值的所有点,并投影到以轴和轴所构成的平面上。
如图6所示,在投影后的图形上,采用人机交互的方式,人为选取最外围的边界点作为测算点,选取原则为:①必须是投影后外围的轮廓点;②要忽略树冠离散点的影响;③依次连接后所形成的图形必须包含投影后的大部分点(离散点除外)。
对测算点进行依次连接后所构成的闭合平面就是此等高线所形成的横截面,再根据式(3)计算得到此横截面的面积。
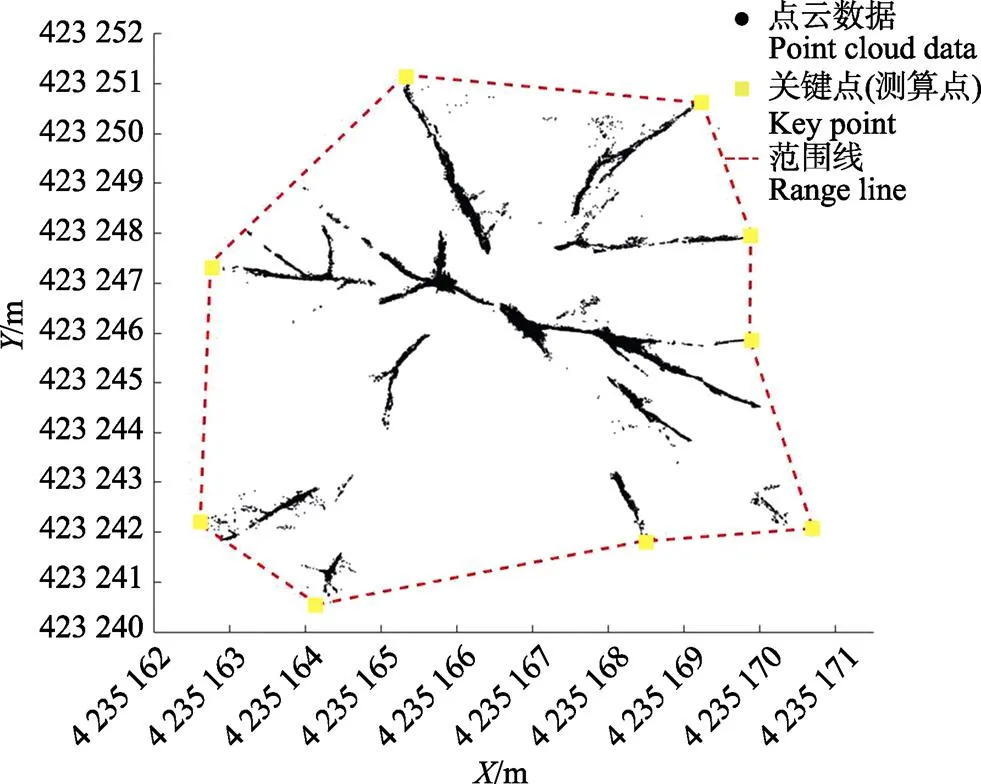
图6 树冠横截面积的提取
3)树冠最优分割层数的确定
在对树冠分割时,分割层数的不同会影响树冠体积的测算精度,因此需要寻找一个最优的分割层数,使得在分割层数较少时体积测算值又相对准确。
微积分求体积的思想[31]指出,当随着物体被分割的单元由大变小直至无穷小时,其求得的体积值会稳定在一个常数附近,即有极限;此时的分割单元就是最优分割尺寸,该常数就是物体的体积。依据此原理,对树冠进行不同层数的多次分割,分别计算各次树冠体积的测算值,并进行分析对比,确定最优分割层数。
以6号目标树木为例,将树干第一枝处测算点的高程值作为起点,将树冠点云依次分割为2、3、4、5、6、7、8、9、10、11、12层,其对应的等高距依次为6.00、4.00、3.00、2.50、2.00、1.70、1.50、1.40、1.30、1.10、1.00 m,分别计算不同分割层数时的树冠体积测算值,结果如图7所示。

图7 不同分割层数下的树冠体积测算结果
由图7得出,随着树冠分割层数的增加,体积测算值逐渐增加,当达到某一临界值后基本趋于稳定。当分割层数<8层时,随着分割层数的增加,树冠体积测算值也相应增大,且波动较大,方差为3020.63 m6;当分割层数≥8层时,随着分割层数的增加,树冠体积测算值基本趋于稳定,方差为8.53 m6,且分层等高距由1.50 m递减至1.00 m,变化范围较小。综上,将树冠的分割层数确定为8层为最优。如图8所示,6号目标树木的树冠点云被7条等高线分割为8层。
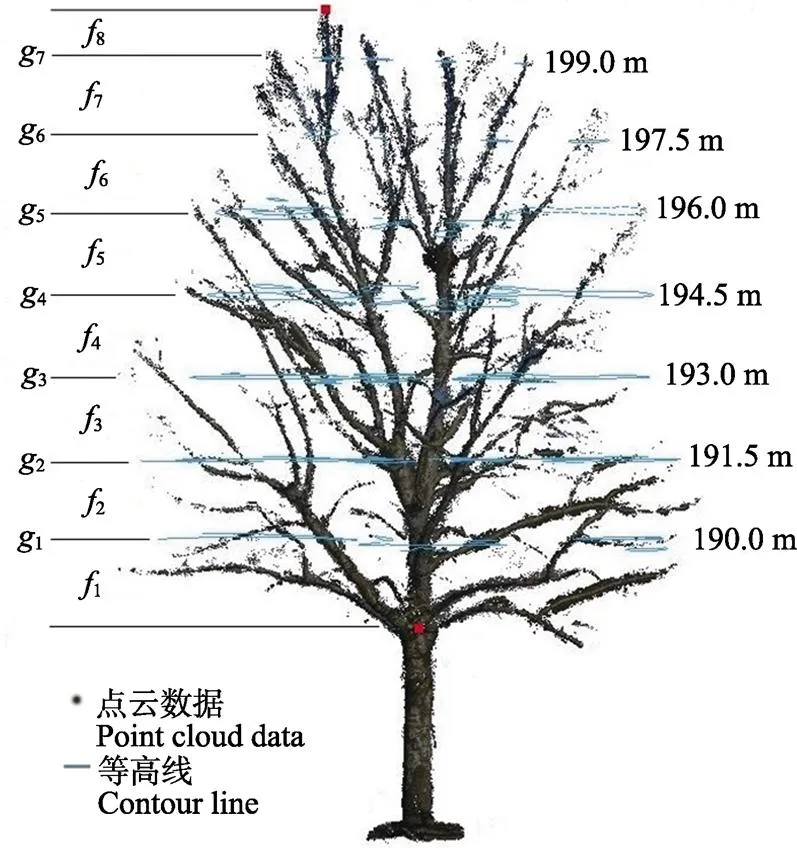
注: f1、f2、…、f7、f8表示树冠分层;g1、g2、…、g6、g7表示树冠横截面。
2.3 测算结果精度检验
以全站仪实测获取的树木特征点的三维坐标为基础,根据文献[2]的方法,分别求得8棵目标树木的树高和树冠体积的实测值,并以此为参考值,对本文方法测算树高和树冠体积的结果进行精度检验,结果如表3所示。
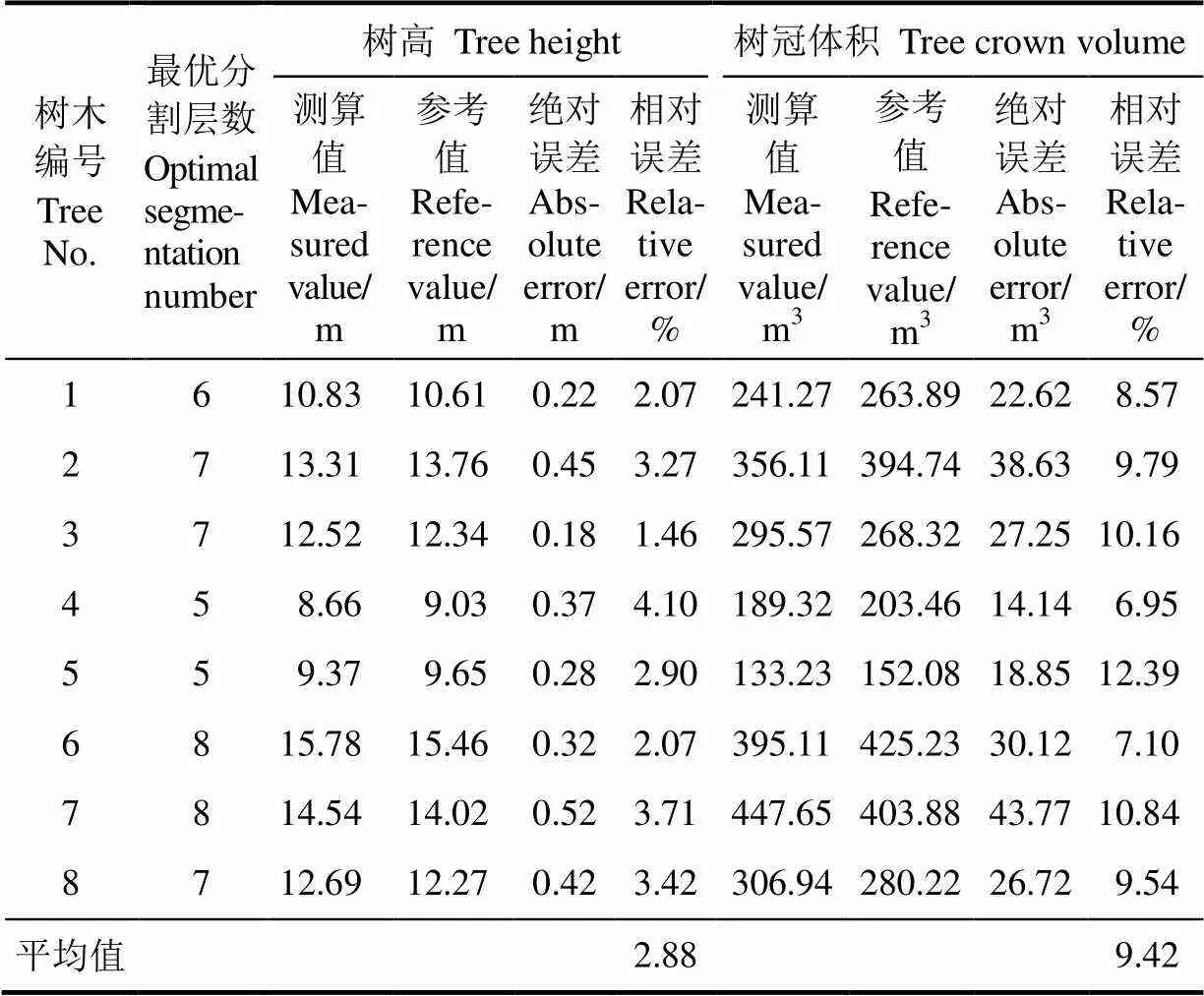
表3 目标树木测算值的精度检验结果
由表3知,8棵不同规格目标树木的树冠最优分割层数具有差异性。在确定树冠最优分割层数时,均以树冠点云为对象,根据冠高进行多次分割,并计算不同分割层数下的树冠体积值;树冠体积值与分层后每层的横截面积和分层高度有关,而横截面积与树冠形状有关,分层高度又与冠高和分层数有关;且对于特定的单棵树木而言,冠高一定,分层高度越小,分层数也就越多。由于目标树木的树冠形状和冠高都各不相同,因而在同样的分析方法下确定的最优分割层数也就不同。
树高测算值与参考值之间相差较小,绝对误差在0.18~0.52 m范围内,相对误差在1.46%~4.10%范围内,8棵目标树木树高的平均相对误差为2.88%;这说明选取的树高测算点与全站仪实测获取的树木顶、底两端点位位置基本一致,能够准确计算出树高。5号目标树木的树冠体积测算值最小,为133.23 m3,7号目标树木的树冠体积测算值最大,为447.65 m3;树冠体积测算值的绝对误差在14.14~43.77 m3范围内,相对误差在6.95%~12.39%范围内,8棵目标树木树冠体积的平均相对误差为9.42%;测算树冠体积的误差相对较大,这是由于树冠体积是一个复合因子,需要多种参数同时参与计算才能获得,且各参数本身具有误差,在运算时误差进行传播积累而造成的。结果表明,树高和树冠体积的测算精度均满足林业调查中对于二者测量结果的要求。
3 讨 论
针对树冠是不规则体的特点,本文在利用生成的三维点云模型测算树冠体积时运用等高线法将其分割为若干个规则体。分割树冠点云所形成的平面就是规则体的上、下两个横截面,等高距就是规则体的高度;横截面积和高度是通过在分割后的点云数据上人工选取测算点,根据其坐标进行计算得到的。无人机倾斜航空影像和POS数据经过空三加密处理生成的点云数据密度较高,且各点均带有空间坐标信息,在选取计算横截面积和高度的测算点时又采用投影法进行转化,能有效降低选点误差对计算结果造成的影响,保证了人工选点的可靠性。
本文提出的利用无人机倾斜航空影像测算树冠体积的方法可以直接通过获取的影像重建出三维点云模型并进行参数提取,且消费级无人机相比三维激光扫描仪和地基激光雷达等设备成本更低、数据获取速度更快、应用前景更为广阔,将其应用到古树名木调查保护工作中,最能体现实际使用价值。然而,由于受到无人机对飞行条件要求较高等因素的制约,目前只以孤立单木作为对象进行分析,如何实现结构复杂林分内多株树木的三维点云模型重建并提高树冠体积测算精度,有待进一步研究。
4 结 论
本文提出了一种基于无人机倾斜航空影像建立单木三维点云模型测算树冠体积的方法。该方法以消费级多旋翼无人机搭载普通数码相机获取目标树木的多角度倾斜航空影像为基础,根据倾斜摄影测量原理对影像进行空三加密处理,生成目标树木的三维点云模型,运用等高线法对树冠点云进行分割,确定树冠最优分割层数,采用投影法提取树高和树冠任意横截面积,通过计算获得树冠体积的测算值,并对结果进行精度检验。
8棵目标树木树高测算值的平均相对误差为2.88%,在最优分割层数下计算的树冠体积测算值的平均相对误差为9.42%。利用生成的三维点云模型测算树高和树冠体积的精度均能满足林业调查的要求。利用无人机倾斜航空影像进行树冠体积测算是可行且有效的。
[1] 闫飞. 森林资源调查技术与方法研究[D]. 北京:北京林业大学,2014. Yan Fei. Research of Technology and Methord of Forest Resource Inventory[D]. Beijing: Beijing Forestry University, 2014. (in Chinese with English abstract)
[2] 何诚,冯仲科,袁进军,等. 基于数字高程模型的树木三维体积测量[J]. 农业工程学报,2012,28(8):195-199. He Cheng, Feng Zhongke, Yuan Jinjun, et al. Three- dimensional volume measurement of trees based on digital elevation model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(8): 195-199. (in Chinese with English abstract)
[3] 冯仲科,黄晓东,刘芳. 森林调查装备与信息化技术发展分析[J]. 农业机械学报,2015,46(9):257-265. Feng Zhongke, Huang Xiaodong, Liu Fang. Forest survey equipment and development of information technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(9): 257-265. (in Chinese with English abstract)
[4] 赵芳,冯仲科,高祥,等. 树冠遮挡条件下全站仪测量树高及材积方法[J]. 农业工程学报,2014,30(2):182-190. Zhao Fang, Feng Zhongke, Gao Xiang, et al. Measure method of tree height and volume using total station under canopy cover condition[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactionsof the CSAE), 2014, 30(2): 182-190. (in Chinese with English abstract)
[5] 焦有权,冯仲科,赵礼曦,等. PSO嵌入SVM算法的活立木材积预报研究[J]. 光谱学与光谱分析,2014,34(1):175-179. Jiao Youquan, Feng Zhongke, Zhao Lixi, et al. Research on living tree volume forecast based on PSO embedding SVM[J]. Spectroscopy and Spectral Analysis, 2014, 34(1): 175-179. (in Chinese with English abstract)
[6] 于东海,冯仲科,曹忠,等. 全站仪测量立木胸径树高及材积的误差分析[J]. 农业工程学报,2016,32(17):160-167. Yu Donghai, Feng Zhongke, Cao Zhong, et al. Error analysis of measuring diameter at breast height and tree height and volume of standing tree by total station[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(17): 160-167. (in Chinese with English abstract)
[7] 吴明钦,孙玉军,郭孝玉,等. 长白落叶松树冠体积和表面积模型[J]. 东北林业大学学报,2014,42(5):1-5. Wu Mingqin, Sun Yujun, Guo Xiaoyu, et al. Predictive models of crown volume and crown surface area for Korean Larch[J]. Journal of Northeast Forestry University, 2014, 42(5): 1-5. (in Chinese with English abstract)
[8] Hildebrandt R, Iost A. From points to numbers: A database-driven approach to convert terrestrial LiDAR point clouds to tree volumes[J]. European Journal of Forest Research, 2012, 131(6): 1857-1867.
[9] 刘鲁霞,庞勇,李增元,等. 用地基激光雷达提取单木结构参数:以白皮松为例[J]. 遥感学报,2014,18(2):365-377. Liu Luxia, Pang Yong, Li Zengyuan, et al. Retrieving structural parameters of individual tree through terrestrial laser scanning data[J]. Journal of Remote Sensing, 2014, 18(2): 365-377. (in Chinese with English abstract)
[10] Asner G P, Knapp D E, Boardman J, et al. Carnegie Airborne Observatory-2: Increasing science data dimensionality via high-fidelity multi-sensor fusion[J]. Remote Sensing of Environment, 2012, 124: 454-465. doi:10.1016/j.rse.2012. 06.012
[11] Zhen Z, Quackenbush L, Zhang L. Trends in automatic individual tree crown detection and delineation-evolution of LiDAR data[J]. Remote Sensing, 2016, 8(4): 333. doi:10. 3390/rs8040333
[12] 徐伟恒,冯仲科,苏志芳,等. 一种基于三维激光点云数据的单木树冠投影面积和树冠体积自动提取算法[J]. 光谱学与光谱分析,2014,34(2):465-471. Xu Weiheng, Feng Zhongke, Su Zhifang, et al. An automactic extraction algorithm for indvidual tree crown projection area and volume based on 3D point cloud data[J]. Spectroscopy and Spectral Analysis, 2014, 34(2): 465-471. (in Chinese with English abstract)
[13] 李增元,刘清旺,庞勇. 激光雷达森林参数反演研究进展[J]. 遥感学报,2016,20(5):1138-1150. Li Zengyuan, Liu Qingwang, Pang Yong. Review on forest parameters inversion using LiDAR[J]. Journal of Remote Sensing, 2016, 20(5): 1138-1150. (in Chinese with English abstract)
[14] 郭彩玲,宗泽,张雪,等. 基于三维点云数据的苹果树冠层几何参数获取[J]. 农业工程学报,2017,33(3):175-181. Guo Cailing, Zong Ze, Zhang Xue, et al. Apple tree canopy geometric parameters acquirement based on 3D point clouds[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(3): 175-181. (in Chinese with English abstract)
[15] 王佳,张芳菲,高赫,等. 地基激光雷达提取单木冠层结构因子研究[J]. 农业机械学报,2018,49(2):199-206. Wang Jia, Zhang Fangfei, Gao He, et al. Extracting crown structure parameters of individual tree by using Ground- based Laser Scanner[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 199-206. (in Chinese with English abstract)
[16] 谢鸿宇,赵耀龙,杨木壮,等. 基于无棱镜全站仪的树冠体积算法[J].中南林业科技大学学报,2014,34(1):12-17. Xie Hongyu, Zhao Yaolong, Yang Muzhuang, et al. Tree crown volume algorithm based on non-prism total station[J]. Journal of Central South University of Forestry & Technology, 2014, 34(1): 12-17. (in Chinese with English abstract)
[17] 李德仁,李明. 无人机遥感系统的研究进展与应用前景[J]. 武汉大学学报:信息科学版,2014,39(5):505-513,540. Li Deren, Li Ming. Research advance and application prospect of unmanned aerial vehicle remote sensing system[J]. Geomatics and Information Science of Wuhan University, 2014, 39(5): 505-513, 540. (in Chinese with English abstract)
[18] Zarco-Tejada P J, Diaz-Varela R, Angileri V, et al. Tree height quantification using very high resolution imagery acquired from an unmanned aerial vehicle (UAV) and automatic 3D photo-reconstruction methods[J]. European Journal of Agronomy, 2014, 55: 89-99. doi:10.1016/ j.eja.2014.01.004
[19] 刘清旺,李世明,李增元,等. 无人机激光雷达与摄影测量林业应用研究进展[J]. 林业科学,2017,53(7):134-148. Liu Qingwang, Li Shiming, Li Zengyuan, et al. Review on the applications of UAV-based LiDAR and Photogrammetry in forestry[J]. Scientia Silvae Sinicae, 2017, 53(7): 134-148. (in Chinese with English abstract)
[20] Gatziolis D, Lienard J, Vogs A, et al. 3D tree dimensionality assessment using photogrammetry and small unmanned aerial vehicles[J]. PLOS ONE, 2015, 10(9). doi:10.1371/journal. pone.0137765
[21] Gaetano R, Masi G, Poggi G, et al. Marker-controlled watershed-based segmentation of multiresolution remote sensing images[J]. IEEE Transactions on Geoscience&Remote Sensing, 2015, 53(6): 2987-3004.
[22] 陈崇成,李旭,黄洪宇. 基于无人机影像匹配点云的苗圃单木冠层三维分割[J]. 农业机械学报,2018,49(2):149-155,206. Chen Chongcheng, Li Xu, Huang Hongyu. 3D segmentation of individual tree canopy in forest nursery based on drone image-matching point cloud[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(2): 149-155, 206. (in Chinesewith English abstract)
[23] Zahawi R A, Dandois J P, Holl K D, et al. Using lightweight unmanned aerial vehicles to monitor tropical forest recovery[J]. Biological Conservation, 2015, 186: 287-295. doi:10.1016/j.biocon.2015.03.031
[24] 史洁青,冯仲科,刘金成. 基于无人机遥感影像的高精度森林资源调查系统设计与试验[J]. 农业工程学报,2017,33(11):82-90. Shi Jieqing, Feng Zhongke, Liu Jincheng. Design and experiment of high precision forest resource investigation system based on UAV remote sensing images[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(11): 82-90. (in Chinese with English abstract)
[25] 刘文萍,仲亭玉,宋以宁. 基于无人机图像分析的树木胸径预测[J]. 农业工程学报,2017,33(21):99-104. Liu Wenping, Zhong Tingyu, Song Yining. Prediction of trees diameter at breast height based on unmanned aerial vehicle image analysis[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(21): 99-104.(in Chinese with English abstract)
[26] Puliti S, Orka H O, Gobakken T, et al. Inventory of small forest areas using an unmanned aerial system[J]. Remote Sensing, 2015, 7(8): 9632-9654.
[27] Kachamba D, Orka H O, Gobakken T, et al. Biomass estimation using 3D data from unmanned aerial vehicle imagery in a tropical woodland[J]. Remote Sensing, 2016, 8(11): 968. doi:10.3390/rs8110968
[28] 何游云,张玉波,李俊清,等. 利用无人机遥感测定岷江冷杉单木树干生物量[J]. 北京林业大学学报, 2016,38(5):42-49. He Youyun, Zhang Yubo, Li Junqing, et al. Estimation of stem biomass of individual Abies faxoniana through unmanned aerial vehicle remote sensing[J]. Journal of Beijing Forestry University, 2016, 38(5): 42-49. (in Chinese with English abstract)
[29] 国家林业局. 国家森林资源连续清查技术规定[S/OL]. 2014: 40-41. https://wenku.baidu.com/view/e0b332884bfe 04a1b0717fd5360cba1aa9118c35.html
[30] 冯仲科,何诚,姚山,等. 一种基于高程等值线法量测树冠体积的方法:201110164615.4[P]. 2011-11-23.
[31] 同济大学数学系. 高等数学(下册) [M]. 第六版. 北京:高等教育出版社,2007:132-135.
Tree crown volume measurement method based on oblique aerial images of UAV
Yu Donghai1,2, Feng Zhongke3※
(1.730000,; 2.730000,; 3.100083,)
Tree crown volume is an important basis for monitoring tree growth and estimating tree biomass. Accurate measurement of tree crown volume has always been a difficult issue in forest measurement research. Traditional method of estimating tree crown volume is to bring crown breadth and tree height measurements to inherent empirical models, but it’s faced with problems such as rough operation mode and no precision guarantee of measurement results. In recent years, the emergence of the modern equipments and technologies lay the foundation to achieve high precision tree crown volume measurements. Unmanned aerial vehicle (UAV) oblique aerial photography technology with high-resolution images changes traditional measurement ways, which can use oblique aerial images to generate point cloud data and extract different types of tree geometry parameters by point cloud information. In this paper, a consumer-level multi-rotor UAV named DJI Inspire-1 was used as data acquisition platform, which was equipped with RGB band of ordinary digital camera named Zenmuse-X3. In the Beijing Jiufeng Forest Farm, comprehensively considering the flight operating conditions of the UAV and tree size specifications, we selected eight target trees with different types and sizes. Using the UAV in the manner of spiral flying, we obtained multi-angle oblique aerial images of these target trees. During operation, the main remote controllor controlled the flight status of the UAV and the auxiliary remote controllor controlled the status of the camera haeundae. These two were operated at the same time to collect the oblique aerial images. The following points were the schemes for collecting UAV data: a) In the case of ensuring a safe distance, taking the trunk of the target tree as the center for low-speed flight photography. b) Adjusting the camera pose in real-time during the hovering process so that making sure obtain images of the target tree at different positions and angles. c) Ensuring the overlapping rate of adjacent images collected at the same height exceeded 90%, and the overlapping rate of images collected at different height exceeded 60%. The acquired images were processed through the principle of aerial triangulation for generating three-dimensional point cloud models of target trees. Based on three-dimensional point cloud models, the research segmented the tree crown point cloud by contour lines method and determined the optimal segment number of tree crown point cloud. To extract tree measurement factors, projection method was used to reduce the dimension of the point cloud data. And the measured values of tree height and the arbitrary cross-sectional area of tree crown were calculated by using the key points. According to the established algorithm, the measured volume of the entire tree crown was calculated by accumulating the volume of each rule body after segmentation. Taking actual values by total station as reference, the accuracy of the tree height and tree crown volume measurement results was examined. The results showed that it was a feasible and effective method that the oblique aerial images of UAV were used to establish the three-dimensional point cloud models of single trees and to calculate the tree crown volume. In addition, the average relative error of tree height and tree crown volume of eight target trees was 2.88% and 9.42%, respectively. The accuracy met the standard for tree height and tree crown volume measurement resulted in forestry surveys. In conclusion, three-dimensional point cloud models generated by oblique aerial images of multi-rotor UAV can realize the extraction of measurement factors of single trees, which could be applied to the investigation and protection of ancient and famous trees. This method provides a new approach for the extraction of single trees geometry parameters.
unmanned aerial vehicle; image processing; forestry; oblique photography; point cloud data; parameters extraction of single trees; tree crown volume
2018-07-17
2018-11-19
国家自然科学基金(U1710123)
于东海,甘肃平凉人,主要研究方向测绘与3S技术应用。 Email:yudh1006@163.com
冯仲科,教授,博士生导师,主要研究方向为精准林业、测绘与3S集成研究。Email:fengzhongke@126.com
10.11975/j.issn.1002-6819.2019.01.011
TP79;S771
A
1002-6819(2019)-01-0090-08
于东海,冯仲科. 基于无人机倾斜航空影像的树冠体积测算方法[J]. 农业工程学报,2019,35(1):90-97. doi:10.11975/j.issn.1002-6819.2019.01.011 http://www.tcsae.org
Yu Donghai, Feng Zhongke. Tree crown volume measurement method based on oblique aerial images of UAV[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(1): 90-97. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.01.011 http://www.tcsae.org
猜你喜欢
科学技术创新(2022年15期)2022-05-18
科学与财富(2020年24期)2020-10-27
山东交通科技(2020年1期)2020-07-24
电子制作(2019年11期)2019-07-04
北京汽车(2018年5期)2018-11-07
意林(绘英语)(2018年2期)2018-06-26
农民致富之友(2017年4期)2017-04-10
现代农业科技(2017年4期)2017-04-10
绿色科技(2017年1期)2017-03-01
小天使·五年级语数英综合(2015年4期)2015-04-20