MPU9250九轴传感器的危岩危石监测系统
2019-01-17 03:11,,
单片机与嵌入式系统应用 2018年12期
,,
(西安工业大学 电子信息工程学院,西安 710021)
引 言
危岩危石等边坡地质灾害因其多发性、突发性、随机性、灾害发生时生存周期短的特点,长期以来,一直威胁着公路铁路运行安全,给公路/铁路运营部门的工作造成不便。传统的工程防护手段并不能完全解除危岩危石对公路/铁路安全运行的威胁,因此危岩危石监测是保障运行安全的最后屏障[1]。
目前常用的监测方法主要有3种:基于视频监测[2-3]系统虽然造价低廉,但视频数据不仅存储量大、易受恶劣天气及周边环境影响,存在一定比例的误报;基于红外激光[4]的危岩危石监测系统虽能在夜间及恶劣天气下工作,但系统仍会受到飞鸟及动物干扰而存在误报,且不能监测越过行车界限的危石;光纤光栅振动探测方法[5-7]虽然能全天24小时工作,但系统需要沿监测路线布设大量光缆线路,多达数十公里,监测效率低,布设传感器数量较大,日常作业时,路基两侧需挖沟布线,施工不便。
公路/铁路边坡防护应与物联网技术相结合,充分发挥无线通信的技术优势,发展远程监测系统是边坡危岩危石的发展要求。为满足公路/铁路边坡危岩危石监测需求,需要有较高的监测精度和实时性、分布式监测功能、方便安装布设等特性,因此本文提出一种采用姿态传感器,利用无线通信技术方法实现对公路/铁路边坡危岩危石的远程分布式监测。
1 系统结构
监测系统由两种功能设备组成:一种是危岩危石监测节点,负责采集危岩危石状态信息;另一种是分中心,功能是将周边监测节点数据利用2G/3G/4G网络传回监测中心。
危岩危石监测节点通过nRF24L01无线模块将报警信息发送至分中心,分中心连接2G/3G/4G网络将周边监测数据传回监测中心,系统结构图如图1所示。
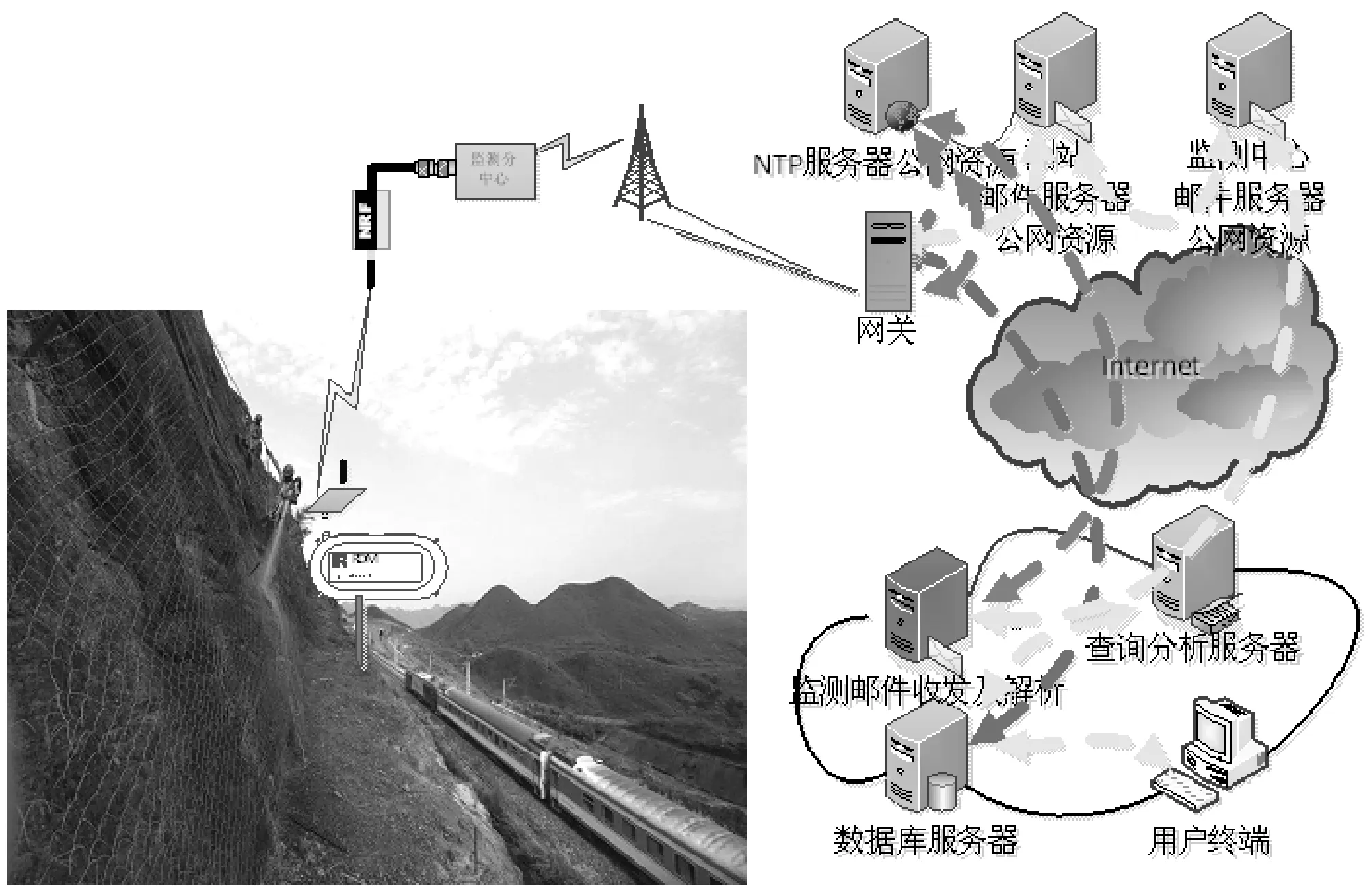
图1 危岩危石监测系统结构图
2 硬件设计
系统监测节点原理框图如图2所示,采用I2C通信协议获取危岩危石监测传感器MPU9250的九轴信息,经内置运动处理引擎(DMP)处理后,提取危石姿态四元数,解算危岩危石姿态,用nRF24L01模块将危岩危石九轴信息(加速度、角速度、磁场强度)和姿态信息发送到分中心,分中心将信息传回监测中心,系统采用太阳能充电或者超级电容供电。
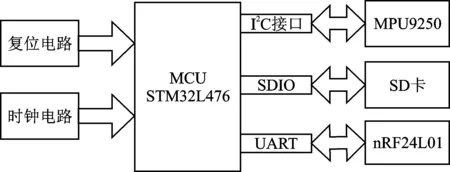
图2 系统监测节点硬件原理框图

(1)

(2)
① 供电。供电系统采用单晶体太阳能电池板,尺寸为84 mm×39 mm×2 mm,充电最大电流为100 mA、工作在5.5 V的SC5R5105Z-H型超级电容组,电容大小为20 F。
② 采集。危岩危石状态监测采用Invensen公司的MPU9250九轴姿态传感器模块,其由三轴加速度、三轴陀螺仪、三轴磁力计组成,在加速度低功耗模式下,检测到高于系统设定值的轴向运动数值时,触发中断(INT引脚输出高电平,持续周期为0.98 Hz)唤醒系统主控制器,发送预警信息。
③ 主控制器。系统采用STM32L476完成系统危岩危石信息处理,其具有低功耗、高性能等特点,工作状态下电流消耗为10 mA。
④ 传输。监测节点与分中心通信采用nRF24L01近距无线通信技术实现,覆盖半径为1 km,分中心与监测中心的数据交互采用SIM7600CE模块,其是一款小体积、高性能的2G/3G/4G无线通信模块。
3 系统软件程序设计
系统工作流程图如图3所示,STM32L476完成系统算法执行。系统软件分为两种工作模式:正常工作模式下,系统定时执行测量、上报任务;系统在正常工作模式的休眠期,进入危石滚落报警模式,一旦危石滚落触发运动中断唤醒系统,监测节点立即采集一组危岩危石状态信息,并将测量数据传输到分中心,分中心上报数据给监测中心,通知相关人员危石滚落位置、方向信息,否则休眠等待下一次定时任务。
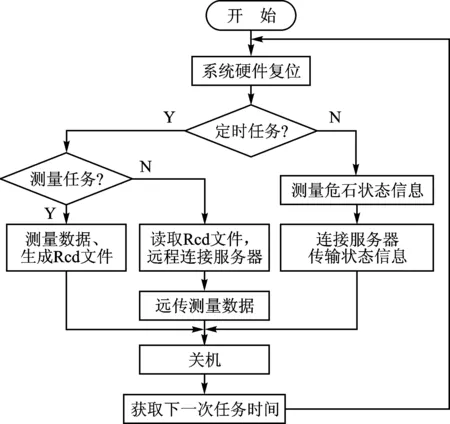
图3 系统软件流程图
3.1 正常模式
(3)
由此可以解算出危岩危石姿态角,其中俯仰角范围为-90°~+90°,航向角范围为-180°~+180°。
3.2 危石滚落报警模式
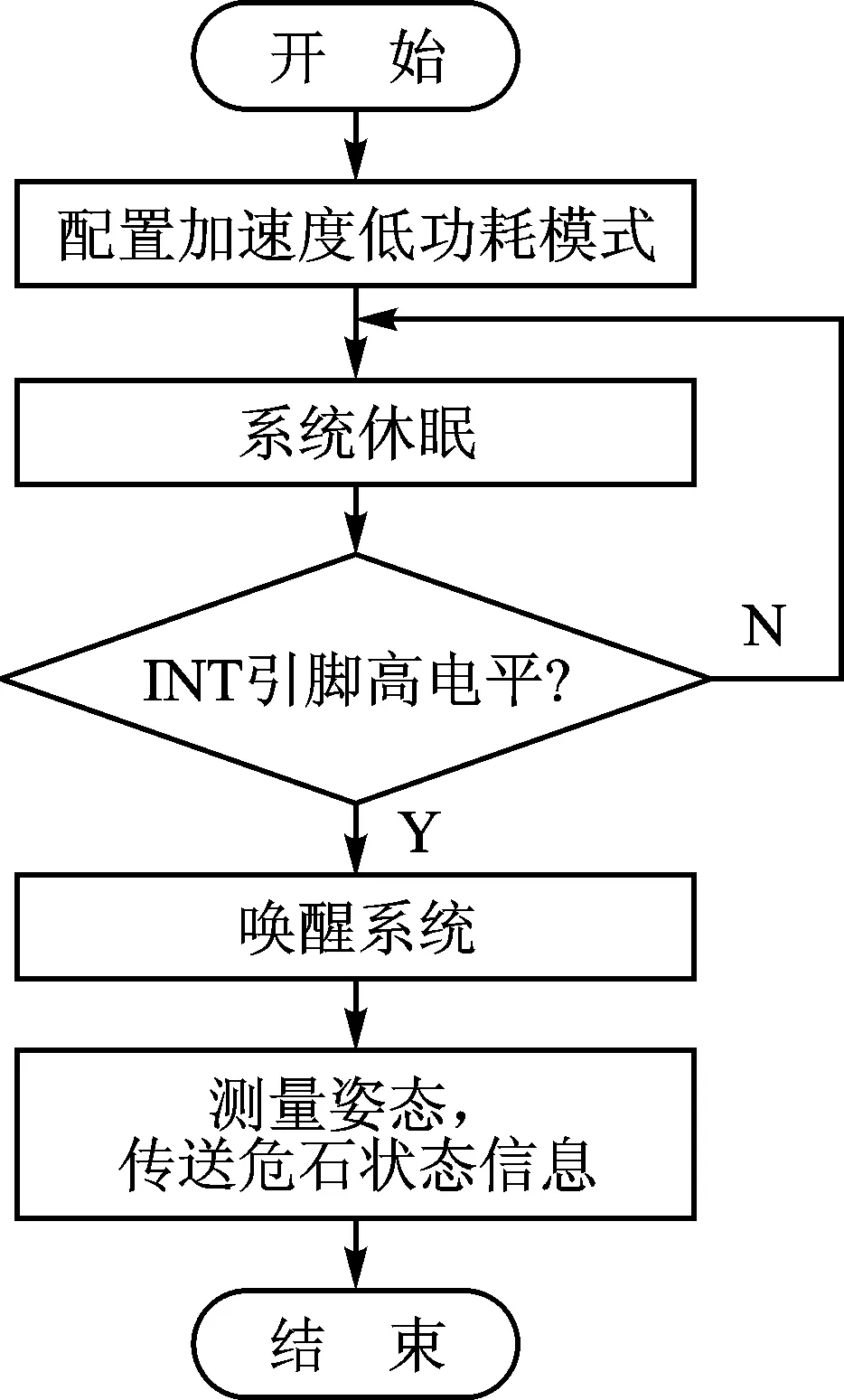
图4 危石滚落报警模式下工作流程
危石滚落报警模式下,采用MPU9250加速度低功耗运动唤醒功能实现系统休眠唤醒,发送危岩危石信息到分中心。工作流程如图4所示。
4 系统测试及数据处理
模拟危石滚落过程,多次采集危石状态信息,发送至分中心,分析从“唤醒-采数-传输-报警”全过程的时间和能量消耗,并将得到的危岩危石九轴信息及姿态角数据导入到Matlab中分析。
4.1 危石滚落报警模式耗时分析
当传感器感知到危石滚落,触发运动中断唤醒MCU,测量一组危岩危石状态数据将其发送至分中心,分中心将其传回监测中心。在“唤醒-采集-传输-报警”过程中,姿态解算耗时如表1所列。

表1 危岩危石姿态角解算数据耗时(单位:ms)
表2所列为危岩危石监测系统在危石滚落报警模式各阶段耗时统计,耗时共计147.71 s,即完成将报警信息发送至分中心,确保有效传输监测数据,经分中心2G/3G/4G网络远程传回监测中心。结果表明,系统传输耗时主要集中于数据远程传输的入网和注册过程,相比于“监测节点-监测中心”结构,系统采用“监测节点-分中心-监测中心”结构,提高了监测节点信息发送成功率,将危岩危石信息及时发送出去,避免因滚落过程中的物理损伤使得信息发送失败,节点失去实时传输监测数据的能力。

表2 危石滚落报警模式各阶段耗时
4.2 系统功耗及工作时间测试
软/硬件配合完成低功耗方案如下:
① nRF24L01选择合适的发送功率,0 dBm发射功率最大,但同时电流消耗也是最大。
② 监测节点的nRF24L01、MPU9250大部分情况处于休眠或掉电状态。
③ 危石滚落报警模式阶段,主控制器待机状态只保留RTC时钟,系统时钟及wakeup引脚工作,切断其余所有外设供电。
危岩危石监测系统各部分电流消耗如表3所列,经测量,监测节点电流消耗为25.9 mA。直接使用SIM7600CE远传模块传输的电流消耗为252.3 mA,监测节点的功耗减少82%。分中心节点电流消耗如表4所列。
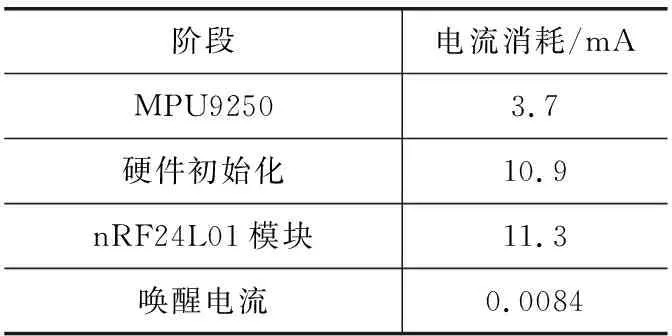
表3 监测节点危石滚落报警模式系统性能分析

表4 分中心节点电流消耗
计算说明:
最长待机时间=(最大电荷量-残余电荷量)/系统休眠电流/3600 单位:小时
工作放电时间=(最大电荷量-残余电荷量)/工作电流 单位:秒
根据表5的计算及实际工作验证,一次性充电,系统最大待机时间约为37天。待机状态系统电流消耗约为0.009 mA,低功耗特性较好,能够适应长期监测要求。
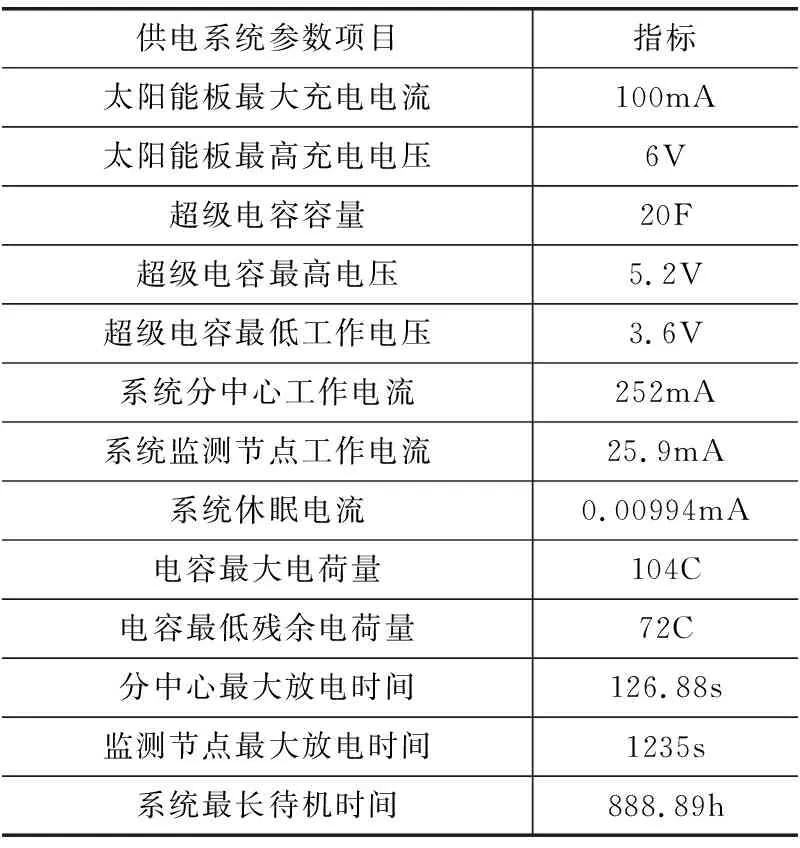
表5 太阳能供电+超级电容供电系统参数
4.3 危岩危石姿态采集精度分析
图5所示为监测中心接收到的远程危石测试数据,数据依次是加速度、角速度、姿态角等。
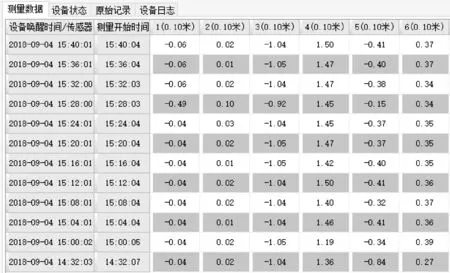
图5 远程监测中心危岩危石监测数据
STM32L476平台解算的危岩危石静态横滚角和俯仰角数据如图6所示,实验采集数据连续测量30分钟,据统计分析,俯仰角和横滚角的解算精度分别优于0.3°和0.2°。实验结果表明,经DMP处理后,解算得到的危岩危石横滚角和俯仰角精度相对较高,能够满足姿态测量需求。
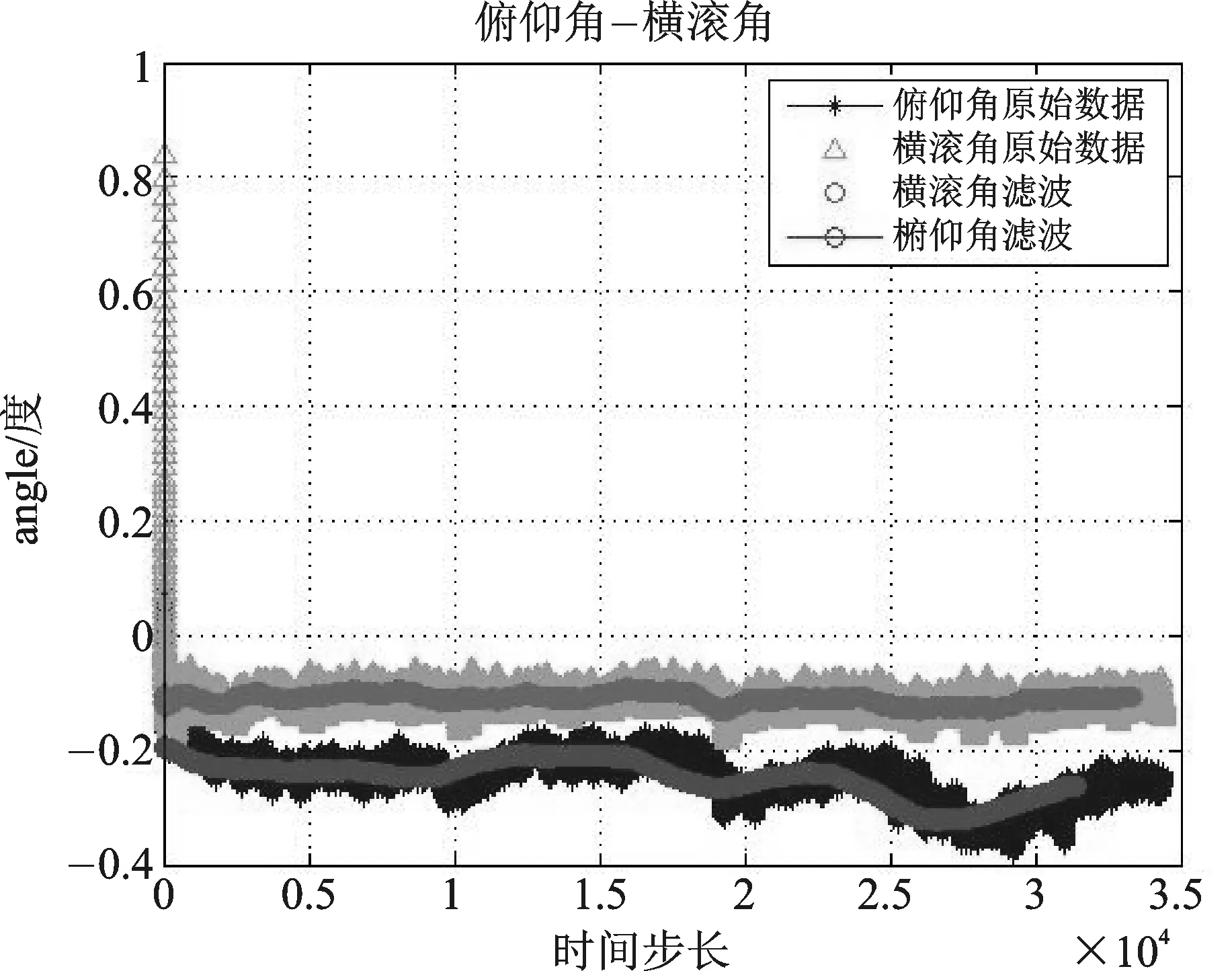
图6 DMP解算得到危岩危石姿态俯仰、横滚角
磁力计校准后航向角数据如图7所示。实验表明,经校准后解算得到的危岩危石的航向角精度优于0.3°。
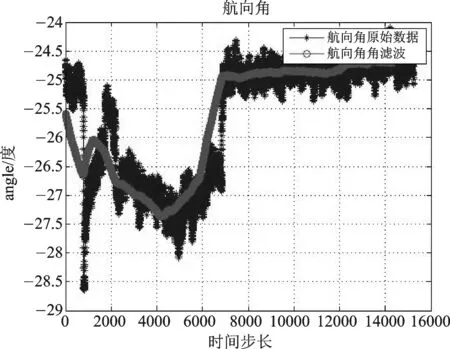
图7 融合磁力信息后的危岩危石航向角
由此可知,监测节点获取的危岩危石姿态角精度较好,可以作为滚落验证标准,辨别是否误报。
结 语

猜你喜欢
建材与装饰(2022年34期)2022-12-07
基础医学教育(2022年6期)2022-07-07
基础医学教育(2022年5期)2022-06-06
地下水(2021年4期)2021-08-27
应用能源技术(2020年11期)2021-01-26
领导决策信息(2017年39期)2017-11-27
数字通信世界(2017年3期)2017-03-29
中国环境监察(2016年11期)2016-10-24
中国交通信息化(2016年2期)2016-06-06
中国铁道科学(2015年6期)2015-06-21