具有极性反转逆变桥的隔离Buck-Boost型逆变器
2019-01-17 08:38石昊彦江加辉陈道炼
通信电源技术 2018年11期
石昊彦,江加辉,陈道炼
(青岛大学电气工程学院,山东 青岛 266071)
0 引 言
光伏、风能、燃料电池等新能源的开发和利用越来越受到人们的重视。逆变器作为新能源发电系统的重要组成部分,其性能优良,对于提高新能源的利用率起到了至关重要的作用。因此,逆变器一直是电力电子学和新能源发电领域的研究重点[1-4]。
传统的并网逆变器多为两级式,文献[5-6]论述的两级式并网发电系统具有控制灵活等优点,但存在两级功率变换、体积重量大,成本高等不足。为了减少功率变换级数,提高变换效率,人们开展了许多有意义的研究工作。文献[7]论述了基于LLC谐振变换器的准单级式变换器,将高效率的LLC谐振变换器引入此结构,但存在控制复杂、成本高等问题;文献[8]论述了一种准单级差动双向反激直流变换器型逆变器,存在环流、变换效率不理想、输出电压控制不精确的缺点。为了进一步降低系统成本,提高输出波形质量,学者进行了一系列探索。
针对以上的不足,本文提出了一种具有极性反转逆变桥的隔离Buck-Boost型逆变器,该拓扑具有输出波形质量高、带载性能好、变换效率高、可靠性高等优良性能,是一种小容量逆变电源的优良方案。
1 电路拓扑
该电路拓扑是由双向隔离Buck-Boost直流变换器和极性反转逆变桥构成,属于准单级功率变换,如图1(a)所示。该逆变器将输入的不稳定直流电压经直流变换器和极性反转桥变换为稳定的工频正弦交流电压。

图1 具有极性反转逆变桥的隔离Buck-Boost型逆变器
2 复合控制策略
2.1 小信号模型
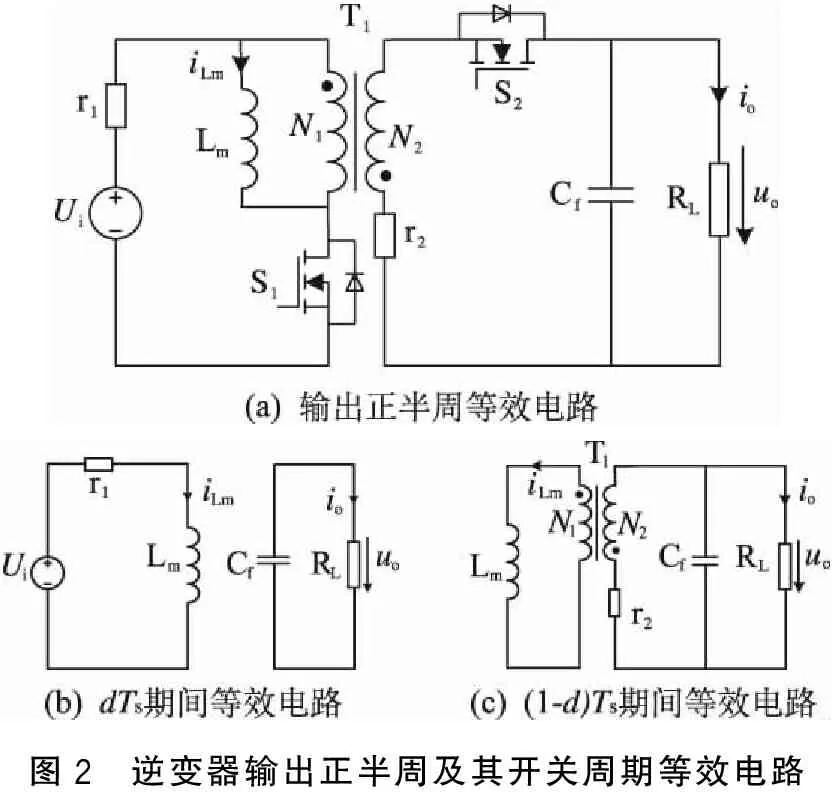
该逆变器在一个高频开关周期的等效电路,如图2所示,对于变压器的原边等效电阻以及开关管S1的导通电阻用r1表示,副边等效电阻和开关管S2的导通电阻用r2表示,励磁电感Lm与变比为N1/N2的变压器并联。
根据正半周的等效电路并利用状态空间平均法进行小信号建模,可得该逆变器在电流连续工作模式下的传递函数G(s)为
(1)
其中,ILm=nUo/[RL(1-D)]
2.2 控制策略
为了使系统的稳态误差降到合适的范围并且能够有效地升高动态响应速度,本文在对等效电路综合分析的基础上提出了一种具有PI、前馈、重复控制策略,如图3所示。
图3(a)中,Grc(s)为重复调节器、Gff(s)为前馈调节器、Gpi(s)为PI调节器,将uo、ui和基准信号ur经Gff、Gpi和Grc比较运算,得到控制信号ue,ue与单极性三角载波uc交截得到功率开关控制信号。
3 复合控制器设计
3.1 前馈调节器Gff设计
图3(a)中输出电压Uo(s)可表示为
(2)
若将前馈调节器的传递函数设计为
Gff(s)=1/G(s)
(3)
式(2)可以简化为
Uo(s)=Ur(s)
(4)
根据式(2)~(4)可知,Uo可以在任何时刻将输入量Ur重现出来,具有比较好的响应特性。然而,反激逆变器在连续电流工作模式时,系统的传递函数G(s)实现全补偿困难。因此,在设计Gff时为使形式简单且易于实现,只需仅在低频段内实现近似全补偿。电流CCM的反激变换器稳态占空比为
D=Uo/(Uo+nUi)
(5)
设计前馈调节器Gff,使得
Uef=Ur/(Ur+nUi)
(6)
在理想状态下,前馈调节器可实现误差全补偿。但由于电路中的寄生参数,故根据以上各式得出的Gff不足以将误差完全补偿,需要继续补偿,才能让系统的稳态精度以及带载能力达到实验预期的范围之内。
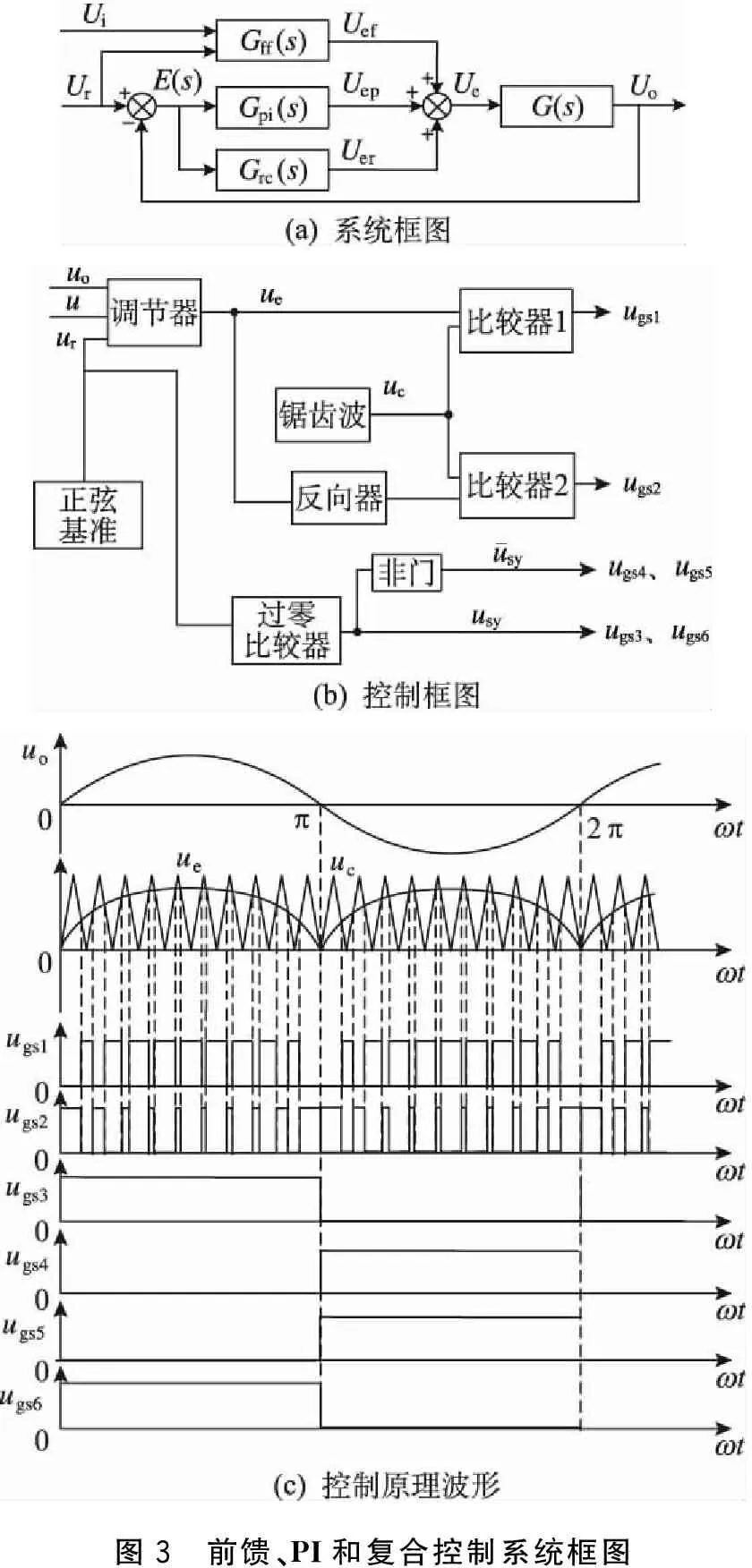
图3 前馈、PI和复合控制系统框图
3.2 PI调节器Gpi设计
该逆变器在采用PI调节后,能够在前馈控制的基础上进一步使稳态误差得到补偿。
设计输入电压Ui=110 V,输出电压Uo=220 V,励磁电感Lm=535.8 μH,滤波电容Cf=9 μF,负载RL=96.8 Ω,储能式变压器匝比n=N2/N1=78/63,r1=0.39 Ω、r2=0.48 Ω,占空比D=0.52,比例积分调节器kp=0.00012,ki=1.1,将以上各数据代入式(2),可得逆变器的开环传递函数G(s)为
(7)
在利用Gpi调节后,补偿特性如图4所示。

图4 系统在PI补偿前、后的开环频率特性
根据图4可得,使用PI调节前系统的开环传递函数的相角裕度为-87.1°,由此可知,系统难以维持稳定状态;但在采用PI调节后系统的G0(s)为
(8)
系统在利用PI调节器补偿后,根据式(8)可得G(s)为89.1°,符合要求。
3.3 重复控制调节器Grc设计
所谓重复控制是基于内模原理的一种控制方法,能够使该内部模型很好地描述系统外部信号特性,具有较强的扰动抑制能力。
C(z)的频域传递函数为
(9)
将C(s)的截止频率设在200 Hz,ζ=0.7,采样频率fs=50 kHz,采用Tustin变换离散化可得
(10)
当kp=0.00012,ki=1.1时,可得重复控制器的等效控制对象为
Cp(z)=
(11)
补偿后的波特图如图5(b)所示。由图5(b)可知,所采用的重复控制调节器Grc能够让系统的稳态精度以及带载能力达到实验预期的范围之内。
4 样机实验
实验数据:样机的容量S=500 VA,输入电压Ui=110 V,输出电压Uo=220 V/50 Hz,负载功率因数为-0.75~0.75,开关频率fs=50 kHz,变压器的原边电感Lm=535.8H、变比N2/N1=78/63、磁芯选用NPH184060,Cf=9F,S1选用STB45N40DM2,S2选用IPB65R190CFD,S3~S6选用SPB21N50C3,设计的500 VA 110 VDC/220 V 50 HzAC具有极性反转逆变桥的隔离Buck-Boost型逆变器的实验波形图如图6所示。图6(a)、(b)、(c)依次为阻性负载、感性负载、容性负载的输出波形,(d)为非线性负载时的实验波形图。

图5 系统补偿前、后的开环频率特性

图6 样机的实验波形
图6实验结果表明:(1)逆变器输出电压uo为220 V 50 Hz的正弦波,线性负载下和在非线性负载下电压的谐波失真度依次是0.69%、0.71%、1.08%、0.95%,如图6(a)~(d);(2)有源嵌位电路有效地抑制了S1的关断尖峰,如图6(e)~(f)所示;(3)RC缓冲有效抑制了副边开关管的尖峰,如图6(g)~(h)所示。功率开关S3-6工作在低频模式,开关损耗低,如图6(i)~(j)。
逆变器样机在额定输入电压和不同负载下的变换效率,如图7所示。
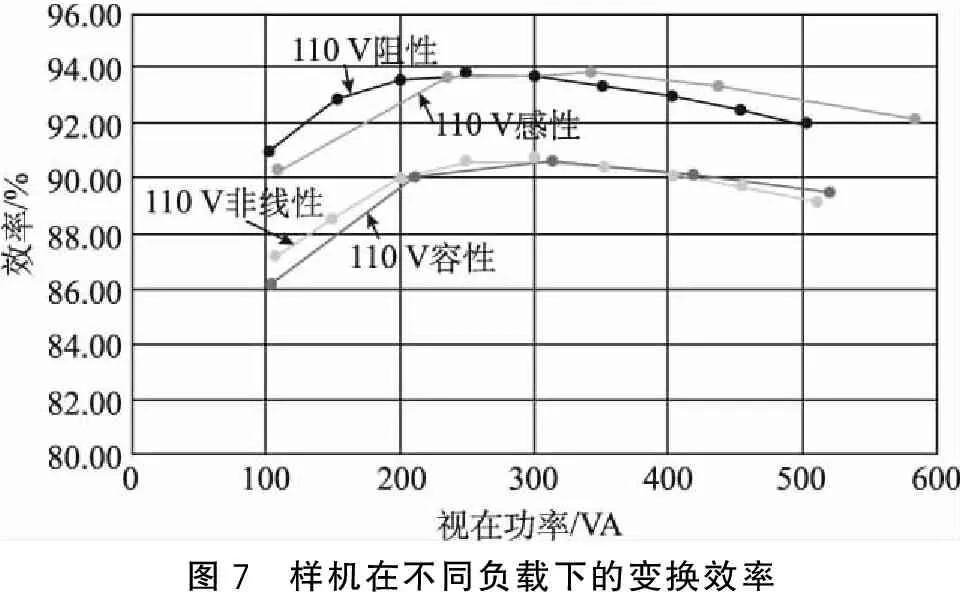
图7 样机在不同负载下的变换效率
综上所述,采用前馈、PI和重复控制相结合的具有极性反转逆变桥的隔离Buck-Boost型逆变器具有电路结构简洁、成本低、准单级功率变换、变换效率高、输出波形质量高、带载能力强等优点。
5 结 论
(1)具有极性反转逆变桥的隔离Buck-Boost型逆变器是由双向隔离Buck-Boost型直流变换器和极性反转桥构成。
(2)采用前馈控制能够降低稳态误差对系统的影响,起到及时克服干扰的作用;采用比例积分调节能够使系统的开环传递函数的相角裕度由-87.1°变为89.1°,使系统的稳定性大大提高;采用重复控制后,逆变器在额定阻性负载、感性负载、容性负载和非线性负载下的效率依次为91.94%、93.05%、87.64%、89.09%,逆变器的带载能力得到了较大的提高,并且使系统能够无静差地跟随输入信号,具有较强的扰动抑制能力。
(3)500 VA 110 VDC/220 V 50 HzAC样机测试结果表明,其具有电路结构简洁、成本低、准单级功率变换、变换效率高、输出波形质量高、带载能力强等优点。
猜你喜欢
农业工程学报(2022年13期)2022-10-09
电气电子教学学报(2022年3期)2022-07-30
灌溉排水学报(2022年6期)2022-07-13
燃料化学学报(2022年5期)2022-05-30
水泥工程(2020年4期)2020-12-18
宇航计测技术(2018年3期)2018-09-08
海军航空大学学报(2015年1期)2015-11-11
汽车与新动力(2015年1期)2015-02-27
汽车与新动力(2014年6期)2014-02-27
汽车与新动力(2014年2期)2014-02-27