
海洋钻修机二层台机器人设计及选型研究
2019-01-14 02:44丁辉张超赵暕边守臣
科技资讯 2019年31期
丁辉 张超 赵暕 边守臣
摘 要:针对钻机二层台机器人在海洋钻修机上应用的技术瓶颈,开展了海洋钻修机二层台机器人的设计选型、安装方式及二层台容量等基础性的技术研究。该文立足海洋钻修机的功能特点、结构空间、作业工况及作业安全等方面,提出了二层台机器人驱动方式和安装方式的设计及选型方法,采取固定式指梁和可调式指梁的自动化二层台设计解决了立根盒容量问题,该文为海洋钻修机二层台机器人的研制提供了技术借鉴,为海洋钻修机设计工作者深入开展二层台机器人的研究指明了方向。
关键词:海洋钻修机 二层台机器人 自动化二层台 驱动方式 安装方式
中图分类号:TE922 文献标识码:A 文章编号:1672-3791(2019)11(a)-0042-03
Abstract: In view of the technical bottleneck of the application of the automatic pipe-handling of monkey-board of drilling rig on offshore drilling and workover rig, Basic technology research on design, type selection, installation mode and capacity of monkey-board of offshore drilling and workover rig has been carried out. This paper is based on the functional characteristics, structure space, working conditions and safety of offshore drilling and workover rig. The design and selection of driving mode and installation mode for automatic pipe-handling of monkey-board are presented. The design of automatic monkey-board with fixed finger beam and adjustable finger beam solves the problem of capacity of monkey-board. This paper provides a technical reference for the development of automatic pipe-handling of monkey-board of offshore drilling and workover rig, and points out the direction for further research of automatic pipe-handling of monkey-board for designers of offshore drilling and workover rig.
Key Words: Offshore drilling and workover rig; Automatic pipe-handling of monkey-board; Automatic monkey-board; Driving mode; Installation mode
随着石油装备自动化和智能化技术的发展,自动化抓管机、二层台机械手、动力猫道、铁钻工、顶驱等石油钻井装备得到了长足的发展,已广泛应用于陆地钻机和钻井船中,但由于海洋石油钻修机的结构特点、安全环保、作业空间及作业工况等因素,给海洋钻修机二层台自动化装备的研究与应用带来了一定的挑战。
为解决海洋钻修机二层台机器人研究与应用的瓶颈,中海油服油田生产事业部研究团队围绕海洋钻修机二层台机器人的设计选型、安装方式及二层台容量和安全管卡的设计瓶颈等开展了技术研究,并提出了系列解决方案,为下一步海洋钻修机二层台机器人样机的研制与应用打下了技術基础。
1 工作原理和关键技术指标
1.1 二层台机器人工作原理
海洋钻修机二层台机器人主要由自动化二层台、二层台机械手、液压吊卡、气动卡瓦及集成控制系统等组成。海洋钻修机起下钻作业时,钻具上端通过液压吊卡和游车大钩提升到二层台以上位置,由钻工将钻具下端摆放到立根盒合适位置上,再由二层台机械手将钻具抓持住,液压吊卡打开,由二层台机械手将钻具推扶至指梁中间,指梁门闩关闭。下钻作业时,操作相反。
1.2 二层台机械人环境技术指标
工作环境温度:-20℃~50℃;
工作环境相对湿度:10%~90%;
工作风速:0~17.1m/s(7级风);
工作噪声:≤80dBA。
1.3 二层台机械人作业技术指标
钻具排放节拍:150s/柱(每柱19m);
机械手运行速度:≥0.2m/s;
机械手推扶力:不低于750N;
回转角度:±90°;
臂架操作半径:≥2000mm。
1.4 自动化二层台技术指标
二层台设计依据:API Spec 4F 钻井和修井井架、底座。
二层台容根尺寸:满足2-3/8"~3-1/2"、4"~5-1/2"排放要求和预留8-1/2″钻铤排放位置。
立根盒容量:满足井下钻具的排放要求或达到原二层台85%以上。
自动化二层台应满足自动化机械手安装、运动及避让和拆卸运输要求,二层台猴台满足人、机共用要求。
2 二层台机器人设计及选型研究
2.1 驱动方式的设计及选型研究
国内外石油钻机二层台机器人主要驱动方式分为液压驱动和电机驱动。液压驱动式二层台机器人采用低速大扭矩马达减速机驱动,能悬持大吨位钻铤和特殊管柱,通过液压系统高精度比例节流调速阀、程序补偿功能等措施,实现机器人多关节复合运动轨迹精确控制,实现立根准确,整齐排放。电机驱动式二层台机器人采用防爆伺服电机驱动机器人沿猴台滑动、旋转及通过伺服电机驱动机械手前后伸缩,电机驱动式二层台机器人采用自然风冷、具有极高的平稳性,完成速度与位置的精确控制[1]。
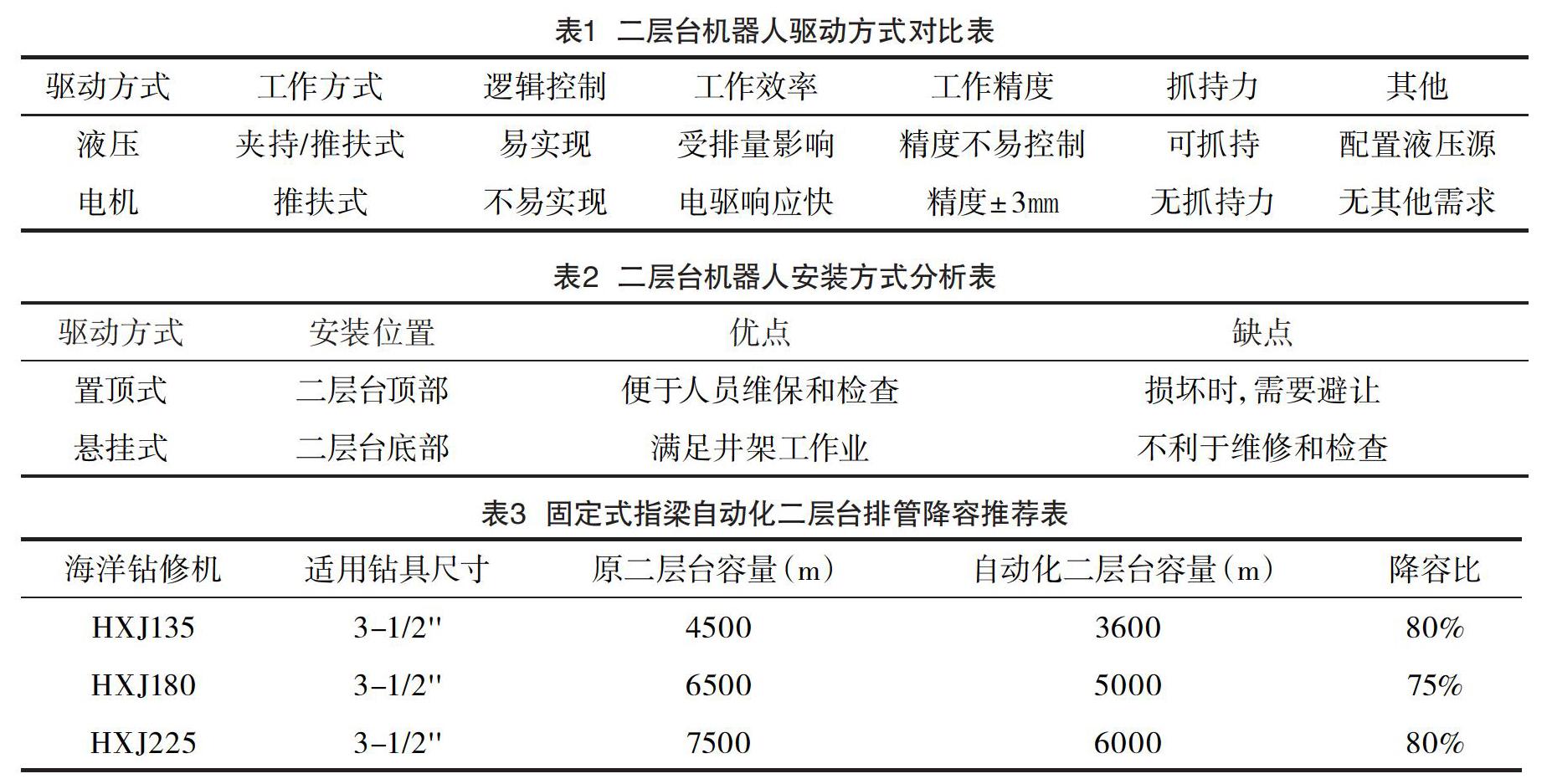
根据二层台机器人现有驱动方式,结合海洋钻修机的作业功能和作业工况要求,围绕二层台机器人的工作方式、逻辑控制、工作效率、工作精度及推扶和抓持力等方面进行对比分析[2],表1为二层台机器人驱动方式对比表,给出海洋模块钻机和海洋修井机二层台机器人的驱动方式选型方案。
(1)海洋模块钻机主要用于钻井作业,井架高度为44~46m,一般使用5"~5-1/2"钻具,三单根为一柱作业,钻具型号比较单一、且钻具较重,因此需要较大的夹持式/推扶式,推荐使用液压驱动式二层台机器人。
(2)海洋修井机主要用于修井作业,井架高度为29~33m,一般使用2-7/2"~3-1/2"钻具,两单根为一柱作业,钻具较轻,因此液压驱动式和电机驱动式二层台机器人均可以在海洋修井机上应用。
2.2 安装方式设计及选型研究
国内外石油钻机二层台机器人的安装方式一般分为置顶式、悬挂式及固定抓持式。固定抓持式主要是安装于井架主体结构上或钻台上,通过液压驱动,可以实现立柱的抓持移运,但需要较大的作业空间,因此适用于钻井船或大型超深钻机。置顶式和悬挂式主要安装于井架二层台上,沿二层台的猴台前后滑移,实现对立柱的推扶移运,结构比较紧凑,因此应用于ZJ40以下钻机或修井机。
根据海洋钻修机井架的结构承重、作业空间及作业工况等要求,该文仅对置顶式和悬挂式海洋钻修机二层台机器人进行选型分析,表2为二层台机器人安装方式分析表。
鉴于以上分析,置顶式二层台机器人可以通过设计纵横向导轨或延长导轨的方式解决二层台机器人的避让问题,解决人、机共用的问题,悬挂式二层台机器人需要在二层台下方悬挂维修平台解决检维修问题,因此置顶式和悬挂式两种安装方式均可在二层台机器人的样机研制中开展进一步深入设计。
2.3 自动化二层台设计及选型研究
为了满足二层台机器人作业回转半径、排管精确度、钻具安全排放及钻修机立根盒容量等要求,因此自动化二层台设计既要满足机器人精准排管要求,又要满足排管容量和安全固定要求。
为满足二层台机器人精准排管设计,需保证二层台机器人的运动轨迹和机械手推扶轨迹能够精准排放到二层台的指梁中,因此需要考虑自动化二层台指梁的刚度和安装精度,二层台指梁的安装精度至少保持在±2/1000mm,二层台指梁的一般采用70mm×100mm矩形钢,安装方式为固定连接。
由于二层台机器人作业回转半径要求导致二层台指梁较原设计变短,且采用固定式二层台指梁设计,导致自动化二层台排管容量较原二层台减少,且海洋钻修机一般为丛式井,井下钻具型号从2-7/8"~3-1/2",作业期间可能动用4-1/2"~5"钻具,因此排管容量设计将是自动化二层台设计的主要瓶颈。为了解决此设计瓶颈,需开展平台井下钻具综合性调研分析,一方面通过降容方式,将自动化二层台设计为固定式指梁,另一方面通过机械调距方式,将自动化二层台设计为可调式指梁。
固定式指梁的自动化二层台适用于井下钻具和作业钻具的外形尺寸变化不大的海洋钻修机,根据海洋钻修机设计标准[3]和平台实际井深尺寸,推荐固定式指梁自动化二层台排管降容比见表3。
可调式指梁的自动化二层台适用于钻具尺寸变化较大的海洋钻修机,可调式指梁的自动化二层台主要通过更换二层台指梁橇或通过机械螺杆调节二层台指梁。推荐可调试自动化二层台调节范围分为两档,第一档适用于2-7/8"~3-1/2"钻具,第二档适用于3-1/2"~5-1/2"钻具。
3 配套方案设计研究
3.1 人机界面的设计研究
海洋钻修机二层台机器人控制系统应具有良好的人机交互界面,二层台机械手、自动化二层台、液压吊卡、气动卡瓦等可由一人独立操作,既具备一键式操作,又同时具备步进式操作。控制系统应具有画面显示功能,具有显示机械手位置、回转角度、机械臂架操作距离等关键参数显示,同时具备参数设置、故障诊断、数据储存及报警查询功能。
3.2 安全方案的設计要求
海洋钻修机二层台机器人与游动系统高度、二层台机械手与液压吊卡、二层台机械手与自动化二层台指梁锁之间应具备安全互锁功能。
自动化二层台应考虑井架工和后期维修的作业安全要求,包括防护栏杆和安全带悬挂点等。自动化二层台指梁上应设置安全卡簧和指梁锁,以防止钻具倾倒。游动系统应考虑防摆幅设计和防坠落设计。
3.3 配套设备的设计
海洋钻修机二层台机器人还应配套其他附属设备一并使用,如液压吊卡、气动卡瓦等。液压吊卡选型为侧开式,额定工作压力14MPa,翻转角度满足从垂直向前90°翻转,通过更换衬套体适用于2-7/8"~4-1/2"管柱。气动卡瓦适用卡持管柱范围2-7/8"~4-1/2",最大设计载荷依据钻修机最大提升载荷选定,气源工作压力0.6~1MPa。
4 结语
通过开展海洋钻修机二层台机器人驱动方式、安装方式、自动化二层台及配套方案等关键技术的研究,提出了二层台机器人的基本技术参数、初步设计方案和推荐选型方案,为海洋钻修机二层台机器人的研制提供了技术借鉴,同时为海洋钻修机设计工作者深入开展二层台机器人的研究指明了方向,有助于推动了海洋钻修机自动化、数字化装备的发展。
参考文献
[1] 胡送桥,唐清亮,陈明凯,等.钻机二层台排送管机械手刚柔耦合动力学仿真分析[J].石油矿场机械,2017,46(1):34-37.
[2] 王定亚,张增年,王汝华,等.推扶式管柱自动化处理系统研究及发展建议[J].石油机械,2018,46(9):1-6.
[3] 中海油研究总院.Q/HS 2007.1-2013,海上石油平台修井机第1部分:设计[S].北京:石油工业出版社,2013.
