桥梁施工全过程中三维激光扫描技术的应用要点
2019-01-10 01:57史永宏
四川水泥 2018年12期
史永宏
(山西交通职业技术学院, 山西 太原 030021)
三维激光扫描技术是工程测量的一大突破,具有“复现”功能,能够同时采集X,Y,Z三方向坐标和坐标点的RGB颜色信息。既可以根据二维CAD图和设计数据生成模拟三维模型,又可以基于现场采集的点云数据生成计算机三维效果图,可实时查看实际施工与施工设计差别,从而有效避免各类不规范施工带来的质量隐患。目前,三维激光扫描技术已经成为桥梁施工全过程中不可缺少的一部分,各企业成立专业化管理团队为整个施工保驾护航,然而,拱桥施工的步骤十分繁琐,应力分析要求高,各部件精度要求也非常高,三维激光扫描技术的运用仍存在一些难点。为了解决现有的三维激光扫描难点,从三维激光扫描的基本工作流程入手,详细阐述了发挥三维激光扫描作用的应用要点。
1 桥梁施工内容的概述
此项目是钢管混凝土拱桥,全长280.6m,宽16m,拱肋总高5.50m,总宽2.15m,拱上横撑共计10道,全部采用K字型,间距30m。在施工过程中,拱肋采用“以直代曲”的分段钢管组装安置,每段钢管全部在工厂拼接完成进行现状起吊安装,而后,进行桥板铺设,完成拱桥两端的对接。为了保障以上桥梁结构与设计尺寸、位置的一致性,需在施工全程进行三维激光扫描定位,在监测平台进行桥梁部件的位置偏移分析和应力变化。整个过程以Robot和Revit两个处理软件为主,对施工各阶段多次现场采集数据结果进行自动化处理,从桥梁施工进程和部件形变两个方面,实现为桥梁施工全过程提供基础的数据信息支持。
2 三维激光扫描技术的基本工作流程
三维激光扫描是继GPS技术后的测量方式的重大创新,能够精确判断桥梁各部位的变形情况。灵活、简易的操作设备能够收集到桥梁施工现场各个位置的数据信息,形成位置点云数据库,再经内业软件处理,实现在计算机平台上场景复现,其基本工作流程如图1所示。
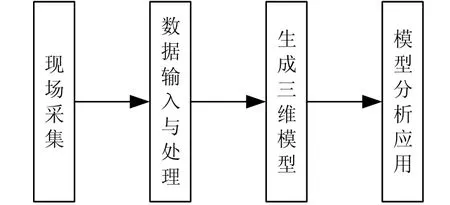
图1 三维激光扫描技术的基本工作流程
2.1 现场采集
现场采集处于数据产生阶段,是对施工进度中各个施工场景的统称。在基坑和桩基施工阶段,需要收集基坑抽水、钢筋安装等数据;在墩台施工阶段,收集墩台身和墩台冒的定位信息;在拱肋搭建和合拢施工阶段,需要监测整个搭建过程各部件形变;在桥面铺设阶段,收集好桥梁沉降数据。每个现场都需要全面、准确的三维数据,否则便会影响到后期的信息处理判断。
2.2 数据输出与处理
扫描到的数据是带有颜色信息的三维坐标数据,与全站仪、水准仪所测数据相比,此数据包含的信更多,需采用配套软件进行数据输出。但是,原始数据量大、冗杂信息多、各场景起始坐标不一致等问题,需要采用数据配准、数据去燥、数据精简等步骤才能进入到智能化的监测系统。由于桥梁各个场景的部件尺寸、形状差异化明显,数据处理的方式存在着一定的差异,需要进行分批处理。
2.3 生成三维模型
在Robot和Revit两个内业处理软件的支撑下,三维激光扫描数据与施工设计的CAD图便能够叠加在一起,直观显示出实际施工与施工设计之间的差异。与以往的测量结果不同,多个场景的模拟还原能够帮助施工管理者从施工进度、施工工序、桥梁形变等方面看到施工存在的问题,及时做出施工调整,弥补了传统后期补救方法的不足。
2.4 模型分析应用
模型分析应用是发挥三维激光扫描技术价值的核心步骤。根据BIM处理技术的现有功能,可通过计算机处理得到桥梁施工现场任意方向的截面图;可得到时差序列上同一区域的施工变化来分析施工进度;可得到时差序列上同一位置的桥梁形变,探索桥梁变形规律。这些处理成果都能够快速实现,且精度比以往的传统测量还要高出许多。
3 三维激光扫描技术的应用要点
三维激光扫描技术减低了测量从业人员的现场采集工作量,同时,增加了数据处理的工作量。为了能够向桥梁施工管理者提供正确、高精度的处理结果,仍需要把握住三维激光扫描技术的应用要点,做好细节处理工作,分以下几点进行阐述:
3.1 施工现场测点布置的应用要点
桥梁施工虽然具有多个阶段,每个阶段都需要进行观测,但墩台顶施工和拱肋安装两个施工现场往往因结构连续体系的影响产生遮挡部分、遮挡点,给后期的三维模型拟合精度造成巨大影响,有必要做好施工现场的测点布置。一是形成多截面交叉测点网。当扫描对象周围布满辅助钢管支架时,将其分为4~6个截面,并分上、中、下三个部分进行扫描,避免出现大面积的露点;二是每次保留固定区域点,如:标靶。多场景拟合形成时间序列图时可根据固定区域点进行数据配准,实现同空间的施工比较;三是提高扫描精度,采用分辨率为 1:1、质量为 4×等参数,对测点25m距离内的点进行密集扫描,收集到各部件细节。
3.2 数据预处理技术的应用要点
一般而言,扫描的数据导入配套软件后进行一键操作,得到精简后的数据结果,但桥梁施工的三维数据则需要根据具体施工现场选择对应的处理方法,避免数据稀疏度高而损失精度信息。一是基于标靶进行数据配准。因标靶在每次测量中都位置保持不动,软件便可根据多次中共有的标靶坐标完成坐标系的统一;二是剔除数据噪声。观测到的施工人员、施工设备以及临时施工材料都进行目视解译剔除,降低噪声数据的干扰;三是根据施工部件分类简化。采用八叉树算法,对部件形状变化小的进行高度精简,包括:桥板面、墩台顶面;对形状变化剧烈、结构精细的部件进行轻度简化,包括:拱肋分段钢管、横撑等。
3.3 BIM技术生成三维模型的应用要点
主流的BIM技术软件为Robot和Revit,其强大的数据拟合功能,能够实现数据点自动拟合。为了达到桥梁施工的精度要求,还需要选择合适的拟合算法,否则会大大降低实用性能。一是深度去燥。通过过滤器设置距离、偏移角度、颜色信息差异等参数信息,在数据预处理的基础上,对每个区域选择性去燥;二是数据拟合。将处理好的数据进行拟合处理,以插值拟合的方式形成点云面,纠正空间性拟合偏差和明显错误;三是生成三维模型。以点云面积为基础进行“点”到“面”的转化,通过预览窗查看三维模拟效果,对其色彩、比例、显示方式等参数进行修改,以达到桥梁施工可视化要求。
4 结语
通过对钢筋混凝土拱桥全过程中三维激光扫描的基本工作流程分析后,列出了各个步骤下的应用要点。此方法能够改变传统测量“后知后觉”的监测弊端,且速度快、测点多、三维模拟处理效果好,扩大了测量工作的服务范畴,是未来桥梁工程测量的主要发展方向之一。
猜你喜欢
机械设计与制造(2023年2期)2023-02-27
商品与质量(2021年43期)2022-01-18
现代企业(2021年2期)2021-07-20
建材发展导向(2021年7期)2021-07-16
汽车实用技术(2021年10期)2021-06-04
装备制造技术(2020年4期)2020-12-25
中国环保产业(2019年10期)2019-11-21
制造技术与机床(2018年9期)2018-09-19
劳动保护(2018年5期)2018-06-05
海外华文教育(2017年6期)2017-08-07