
基于NB-IoT和惯导技术的井盖监控器设计
2019-01-10 02:09:24段建民冉旭辉
自动化与仪表 2018年12期
管 越,段建民,冉旭辉
(北京工业大学 信息学部,北京 100124)
在我国城市化进程中,随着基础设施建设的不断完善,市政、通信、交通等领域工程井盖的防盗和异常预警成为一个突出问题。
现阶段,井盖的防盗和监控主要采取基于图像处理的视频监控方式[1-2]、机械锁闭方式[3]、基于Zig-Bee和GPRS的局域基站式通信[4]等手段。视频监控受限于监控覆盖范围,成像易受光线变化、恶劣天气等影响;机械锁闭手段没有监管交互和状态反馈环节,对于非法破拆无法监控;基于ZigBee和GPRS的局域网基站式通信方案,成本高,需要单独配置基站。
井盖位姿检测普遍采用接触式限位开关、加速度计或倾角检测。现有的位姿检测对于外力造成的大角度预期震动、小角度拖动开启井盖、垂直平稳打开井盖等运动过程无法实现很好的区分,造成较高的误报率和漏报率,而接触式限位开关同样存在可靠性差和使用寿命短的问题。
针对以上方案缺陷,文中通过对用电单元电源的实时控制降低功耗,同时NB-IoT相较于传统GPRS模块在通信环节功耗和信号穿透力也有很大优势;通过对预期震动信号分析基于井盖运动特性和惯导数据融合实现对井盖位姿的精确监控。
1 井盖监控器的硬件设计
1.1 硬件总体设计
井盖监控器的硬件主要由电源分层管理单元、主控STM32单片机、惯性测量单元IMU(inertial measurement unit)传感器、WH-NB73 NB-IoT 模块、蓝牙模块、震动激活单元、人机交互单元等7个部分组成,如图1所示。
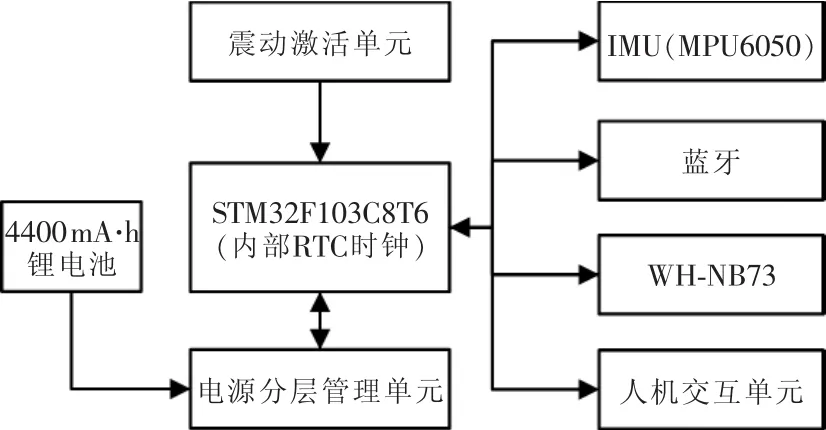
图1 井盖监控器的硬件组成单元Fig.1 Hardware component unit of manhole cover monitor
主控MCU控制电源管理单元使能或失能各部分供电。由IIC读取IMU加速度和角速度原始数据,通过四元数法和改进的基于PI控制器的互补滤波算法解算欧拉姿态角,经过坐标变换为惯导和井盖运动特征识别提供数据。位姿解算结束通过串行AT指令发送至WH-NB73由TCP进行后台数据库数据注入。在井盖布防阶段,使用蓝牙模块与手机建立串行通信,获取GPS信息和井盖管理者信息。
1.2 电源管理
1.2.1 功耗控制策略
系统功耗管理采用分层供电机制,如图2所示。根据系统各单元工作时序和供电优先级,将所有模块分成3个用电单元,并与之对应形成3个用电层。
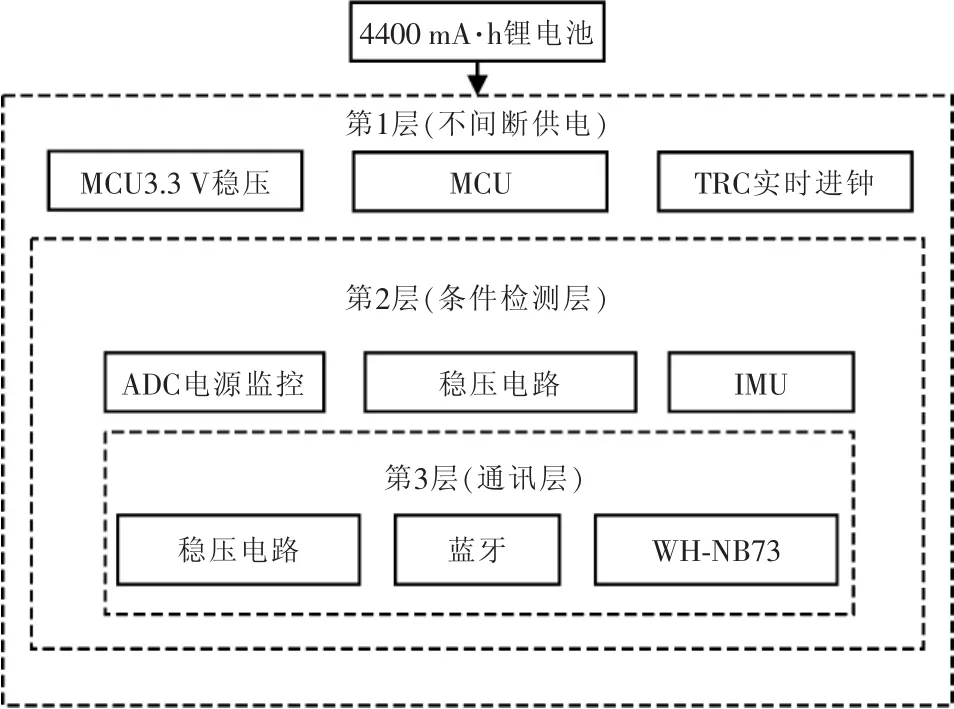
图2 电源分层管理机制Fig.2 Power layer management mechanism
第1层属于不间断供电层,主要维持MCU和RTC实时时钟的工作。工作期间STM32处于正常模式,休眠阶段STM32进入停机模式,芯片所有时钟停止工作,HSI和HSE的振荡器关闭,内部RTC实时时钟保持工作,维持设备定期自动激活巡检。当外部震动触发MCU外部中断,单片机从停机模式被唤醒,此时使能第2层供电进行位姿解算,若判断井盖位姿异常则使能第3层供电进行通信,通信结束即刻失能通讯层。若判断位姿仍处于正常状态,即刻失能检测层供电并且MCU进入停机模式等待下一个工作循环。通过实时的用电管控,最大限度地降低了功耗。
1.2.2 激活休眠控制
井盖激活单元由安装于PCB四周的4个顺时针排布的震动滚珠开关组成,当有外力震动井盖,开关闭合触发单片机外部中断将系统唤醒。电源使能电路采用三极管构成的达林顿驱动电路。通过对锂电池供电的开通关断实现各模块供电控制。电源控制电路如图3所示,其中PB1为单片机控制引脚,通过此引脚输出高低电平控制达林顿管开通关断。
1.3 通信单元设计
1.3.1 NB-IoT模块及通信天线选型

图3 电源控制电路Fig.3 Power control circuit
通信模块选用WH-NB73-B8 NB-IoT通讯模块部署GSM通信网络。使用中国移动网络进行通信,WH-NB73-B8工作频段为B8频段:中心频率900 MHz,上行 880~915 MHz,下行 925~960 MHz。发射功率为23~-40 dBm,接收灵敏度为-115 dBm。
为进一步提高通信质量,增加了外接板状印刷通信天线。天线为水平极化,天线增益为8 dBi,驻波比<1.8,阻抗为 50 Ω。
1.3.2 NB-IoT 模块供电设计
WH-NB73-B8 模块电压输入范围为 3.1~4.2 V。模块电源设计的难点主要在于Active模式下最大发射电流 268 mA(3.8 V),因此电源需要承载较大的瞬时涌流。同时,由于系统的长时间待机指标限制电池选型,系统供电电源要求需满足短时间功率型要求,同时必须兼顾容量型特性。
为减少涌流造成的电源电压突发性跌落,在模块供电回路中增加续流电容,以维持瞬时高功率通信时的电压稳定。
2 井盖监控器的软件设计
软件流程图如图4所示。
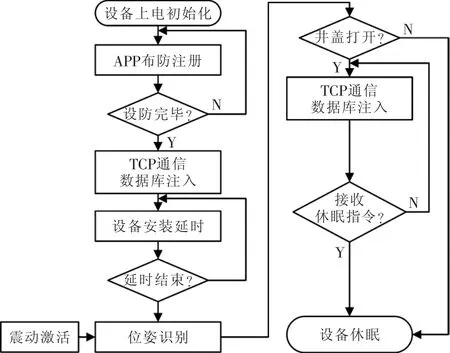
图4 软件流程Fig.4 Software flow chart
2.1 欧拉姿态解算
2.1.1 捷联矩阵与四元数
四元数法在姿态解算中具有良好的计算性能,使用四元数进行计算可以避免欧拉角的万向锁和方向余弦矩阵计算量大的问题[5]。结合这一优点,针对井盖运动过程中可能出现角度变化超过这一特定环境,采用四元数进行姿态解算。
四元数是简单的超复数 (hypercomplex number);由 1 个实数 λ0与 3 个虚数单位 i,j,k 组成。其表达式为

且对规范化的四元数,有

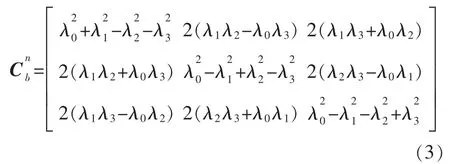
2个坐标系的相对转动可以由四元数唯一地表示。文中定义井盖使用载体坐标系(b系),选取游动方位系统作为导航坐标系(n系);经过3次旋转(欧拉转动顺序为偏航角ψ→俯仰角θ→横滚角φ),由方向余弦和四元数所表示的载体坐标系相对于导航坐标系的变换矩阵[6]为
2.1.2 四元数微分方程
四元数的运动学微分方程[6]为

其中


式中:T为IMU采样周期。对式(6)在定时周期内进行迭代更新,即可得到四元数进而解算得到捷联矩阵,由式(3)四元数矩阵与之对应的方向余弦矩阵的等价关系,即可单值求解出3个欧拉角。其求解公式[6]为
由于初始状态无磁力计得到实际航向角,在此初始航向角设置为0。
2.1.3 基于PI控制器的互补滤波
由于低成本惯性测量单元本身固有的缺陷,导致其陀螺仪模组在静态过程中测量噪声和零点漂移现象明显;加速度计模组在动态过程中存在较大的测量噪声。为了减小测量误差,采用互补滤波方法对加速度计和陀螺仪数据进行融合。
n系下垂直向下的单位向量[0 0 1]T,经过式(3)旋转矩阵Cnb坐标变换,得到载体坐标系下其与加速度计测量值等价,因此做向量积,得到的误差矩阵为

使用PI控制器建立反馈补偿,其运算过程为

式中:ω′(t)为补偿后的角速度;kp,ki为比例积分增益;ΔT为系统采样周期。
2.2 井盖位姿估计算法
2.2.1 井盖运动行为分析
在现阶段,我国使用的圆形工程井盖主要有两类:一类是井盖一端与井圈通过转轴连接,另一类井盖与井圈之间无连接。两类井盖由于机械安装特性的差别其开启运动过程也不同。就无固定井盖而言,井盖开启或者出现震动表现为俯仰角或横滚角出现区别于静止状态的明显变化,垂直打开或移动过程中存在沿天轴位移和沿导航坐标系xOy平面的矢量位移;一端固定式井盖,开启过程主要存在沿旋转轴的角度持续变化。开启过程结束,角度维持在 80~100°范围内。
对于车辆、行人等正常的碾压造成的预期震动信号而言,普遍表现为信号的加速度和角度均值强度弱,周期短,时间窗内震动信号时间与时间窗比值ts/T较开启信号小。
2.2.2 导航位置计算
当捷联矩阵Cnb求解得到后,理论上将载体坐标系下加速度计测得的加速度比力fb进行坐标变换减去重力后,经过二次积分即可得到导航坐标系下井盖位移xn。但是,由于测量噪声和零点漂移的存在,经过积分得到的位移数据的误差随时间累加,经过一段时间后数据便发散不可用。
为控制数据发散速度在每次监控器安装就位后,对2000帧IMU数据求取期望,通过均值补偿对IMU进行简单标定。引入巴特沃斯带通滤波器通过调节通带宽度,对经过坐标变换的加速度比力进行滤波,控制加速度的低频零漂和高频噪声。对滤波后的加速度进行一次积分得到速度vn。
同理,使用带通滤波器对速度进行滤波后进行积分,得到导航坐标系下井盖位移xn。其整个过程如图5所示。

图5 位姿估计过程Fig.5 Position and pose estimation process block
2.2.3 位姿估计算法
位姿估计算法由欧拉角变化的时间窗占比、导航位移、预期震动信号的处理3部分组成,通过逻辑运算实现井盖位姿估计。
1)欧拉角变化的时间窗占比(如图6所示)主要用于区分一端安装转轴类井盖,通过设置阈值,对超过阈值角度的时刻累加与时间窗求比值。有:

2)导航位移 当监控器震动激活后开始进行惯性导航位移解算,解算过程中判断导航坐标系下三轴加速度状态和姿态角p(k),当合加速度处于0范围内并且p(k)处于稳定状态结束导航解算。判断井盖x,y方向的合位移是否超出xmax=50 cm(阈值)的范围,以此作为井盖打开依据,如图7所示。即

式中:x为位移,cm;xn为井盖在x,y方向的合位移;xn,x,xn,y分别为 n 系下井盖 x,y 方向的位移;xmax为判断井盖移动的阈值。
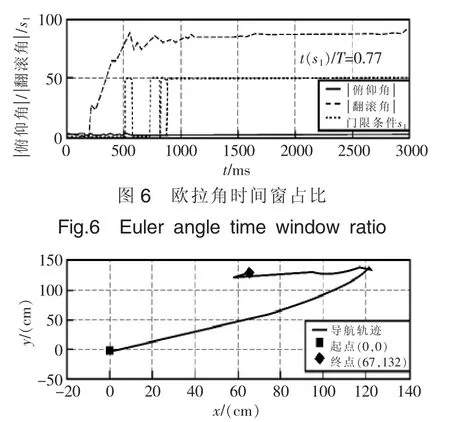
图7 井盖导航位移Fig.7 Manhole cover navigation displacement
3)预期震动信号会产生三轴加速度,从而导致井盖位移漂移,由于惯导无零速校正,对于特殊情况下震动信号强度过大可能使位移误差超过阈值,因此需要对预期震动信号进行处理。由图8可知,预期震动信号在时间窗内的主要特征是其震动频次低,时间窗占比ts/T较小。因此采用与2相同的方法求取沿xOy平面的加速度合力。在时间窗内对加速度合力大于0的时刻进行累加,得到预期震动信号时间ts。通过将预期震动信号时间窗占比与阈值ε比较,得到井盖开启判断条件s3为
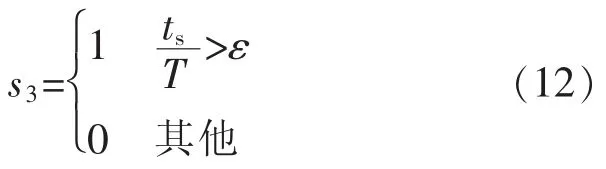
式中:ts/T为预期震动信号时间窗占比;ε为判断井盖移动的时间窗占比阈值,在此ε=0.55。
井盖位姿检测算法由这3个条件进行逻辑运算得到,其表达式为


图8 预期震动信号Fig.8 Expected vibration signal
3 测试结果与分析
试验测试包括3部分,即系统不同状态下功耗(以工作电流表示)、不同场景下信号强度、井盖开启或震动检测。测试对象为北京工业大学校园内井盖。
1)系统不同状态功耗试验(蜂鸣器未工作),具体的工作电流见表1。

表1 系统不同状态工作电流 mATab.1 System working current in different states
以48 h自动激活1次上报系统状态,每次激活检测层位姿解算时间3000 ms,TCP通讯时间5000 ms计算系统待机时间。
每48 h的功耗W48h为
W48h=0.0522 mA×48 h+0.31 mA×(3÷3600)h+140.4 mA×(5÷3600)h=2.7 mA·h
系统待机时间Td(假设其他未知因素造成的误差时间为2 a)为
Td=(4400 mA·h)÷(2.7 mA·h)×2÷365 d-2 a=6.93 a
2)通过HWNB-73的AT指令,发送AT+CSQ读取当前信号质量分别于室内不同位置 (实验室、楼梯间、地下一层)、空旷的室外不同位置、3个井盖下测取数据,见表2。
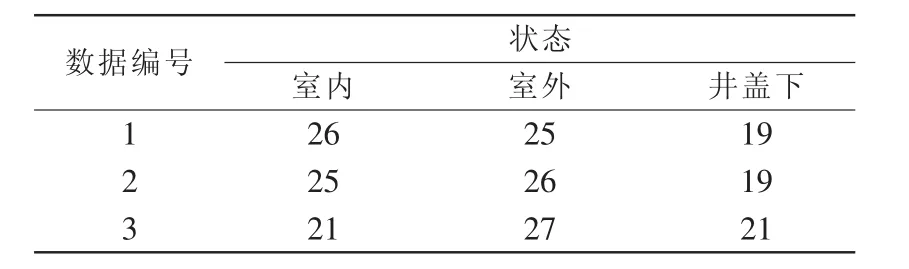
表2 不同环境下信号RSSI值(模块返回整数类型)Tab.2 Signal RSSI values in different environments
3)在试验场景中,选取3个井盖进行试验。井盖1——市政井盖,为一端固定的转轴类井盖;井盖2——雨水井盖,为无固定井盖且井盖较为松动;井盖3——通信井盖,为无固定井盖,井盖与井圈比较紧密。
随机选取的试验数据见表3。由表可知,这3个条件能够准确区分两类井盖的开启与震动动作信号。

表3 不同井盖检测数据Tab.3 Different manhole cover test data
4 结语
基于NB-IoT窄带互联网和惯性导航技术设计的井盖监控器达到了预期性能指标,通过对不同用电层的实时管控降低了功耗,以预期震动信号在时间窗内特征结合井盖运动过程的欧拉姿态角和导航位移数据提出了井盖位姿检测算法。但是,由于惯导过程没有校正环节,仅通过带通滤波器对误差累计进行抑制,较长时间后导航数据仍会发散,因此在较短的时间窗内惯导数据才可用。
目前所设计产品已经进入集中测试阶段,尚未投入商业应用。下一步为了实现惯导数据校正,可以考虑通过超声波或激光传感器测量零速状态对加速度计进行零速校正,达到更精确的位置估计。
猜你喜欢
青少年科技博览(中学版)(2022年10期)2023-01-07 06:16:18
科学技术创新(2020年17期)2020-06-30 02:48:06
小学生作文(低年级适用)(2018年10期)2018-10-27 05:46:00
童话世界(2017年26期)2017-12-18 00:31:13
电子制作(2017年22期)2017-02-02 07:10:09
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
锻造与冲压(2015年14期)2015-06-21 11:35:31
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:51
