
一种新型管道内况检测机器人的设计
2019-01-08 08:37黄艳侯博正
数字技术与应用 2019年10期
关键词:单片机
黄艳 侯博正
摘要:针对流体运输管道内部状况进行定期检查,设计了一种由单片机控制适用于30cm至50cm内径的管道内况检测机器人,该机器人采用旋进式运动机构,具备温湿度、特种气体浓度、光照度等多种参数检测功能,同时可对现场环境进行拍照记录。本设计能及时方便的检测管道内的具体状况并且检测范围大;不限定机器人能够进行采样的数据类型、参数种类,可由工程技术人员依据当前需求,自主改进,加装相应装置以满足测量目的。
关键词:单片机;管道内况;检测机器人;旋进式运动
中图分类号:TP242 文献标识码:A 文章编号:1007-9416(2019)10-0180-03
0 引言
管道运输在当今社会的多种行业起到至关重要的作用,资源领域的油气运输、城市建筑的给排水、通风系统中,管道的使用都必不可少。由于管道设计的复杂性与密闭性,在使用过程中的定期维护检测成为工程技术人员的一大难题,对于管道内部的实时状况采用固定设备进行监控,成本高,并且易受损坏。仪器设备长期处在某些特种物质中,其自身精度、采集数据的准确性难以为技术人员掌握。同时,固定设备仅能检测较小范围内的现场数据,并且不便更新换代,随管道使用年限增加,局部老化、损毁、囤积异物的现象可能无法及时发现并处理,极易引发相关事故,造成经济损失与环境破坏,给人们的生产生活带来不利影响。发生于2013年11月22日的山东青岛中石化东黄输油管道爆炸事故直接原因正是受腐蚀管道未能及时检修,造成了数亿元的财产损失和人员伤亡。为解决此类管道失查问题,研究设计了一种新型管道內况检测机器人辅助各类常见管道内部的维护工作。
1 机器人结构设计
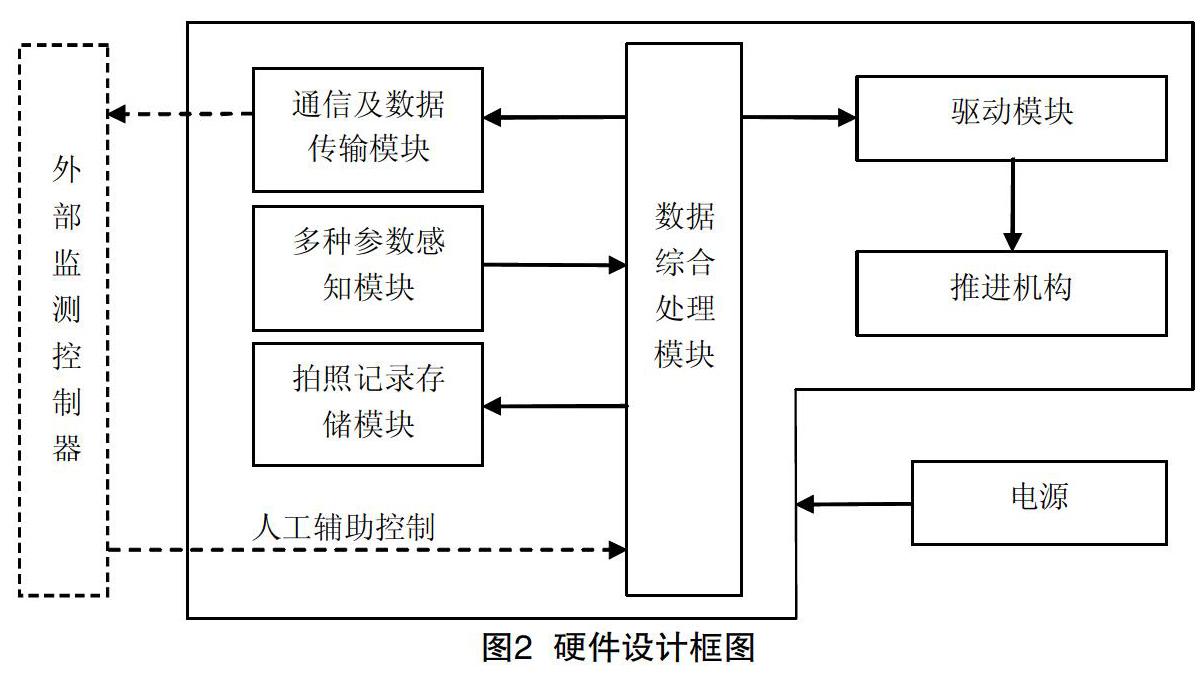
本管道内况检测机器人由以下功能模块组成,包括:(1)为机器人提供电力的电源模块;(2)控制机器人运动的驱动模块及与驱动模块相连的推进机构;(3)用于采集外部信息的多种参数感知模块和拍照记录存储模块;(4)用于信息传输的通信及数据传输模块;(5)对采集到的数据和外部指令进行处理的数据综合处理模块。
以上所述的驱动模块、多种参数感知模块和拍照记录存储模块分别与数据综合处理模块连接,经由通信及数据传输模块连接起数据综合处理模块和对机器人进行辅助控制的外部监测控制器。电源、驱动模块、数据综合处理模块、通信及数据传输模块和多种参数感知模块固定在推进机构内部,根据特种管道的要求可进行密闭处理,以适应更为广泛的现场环境。拍照记录存储模块固定在推进机构前端,用于对管道内环境的实时影像记录,方便外部工作人员对管道内出现的各种突发问题进行综合分析处理[1]。
该新型机器人设计重点在于采用一种新型推进机构,使其能够适应更多的管道结构和适用领域,此外多种参数感知设备的综合应用能够方便工程人员对管道内部环境准确判断,进而采取快捷有效的处理方案。
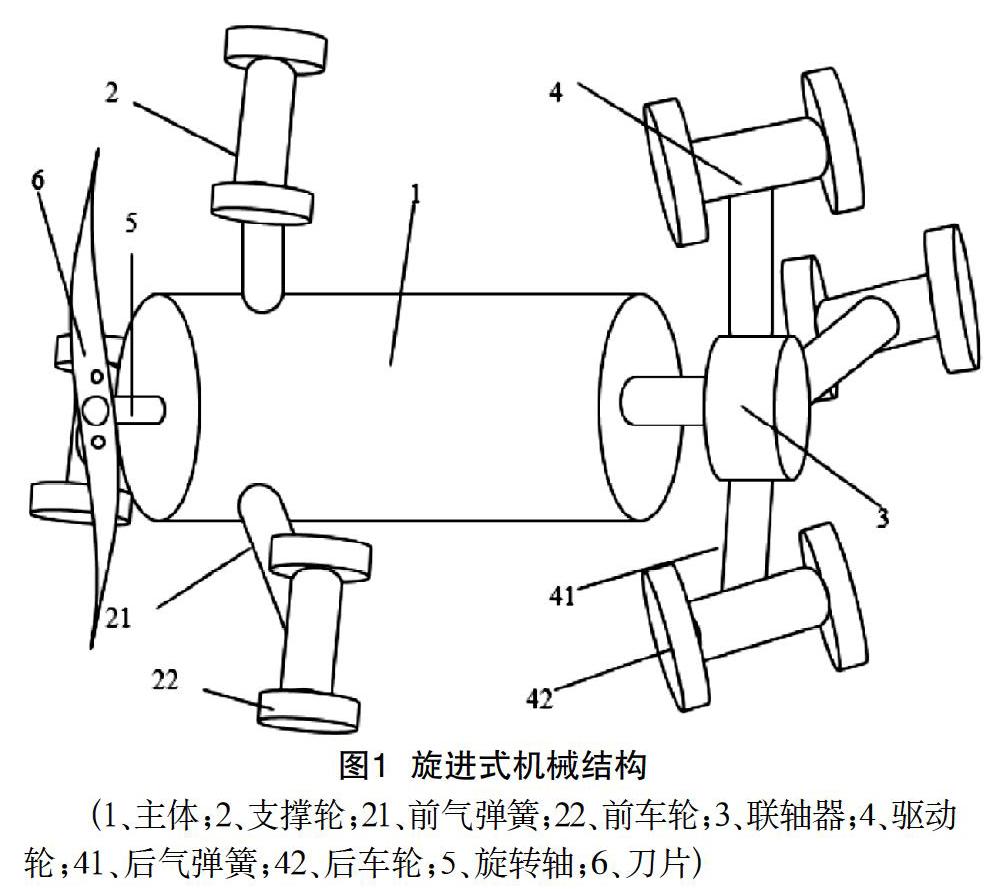
1.1 机器人推进机构
本推进机构采用一种具有清障功能的旋进式机械结构如图1所示,包括用于放置各类功能模块的圆柱形中空主体;用于清除机器人前进道路上小型障碍物的旋转式双叶锯齿形刀片,刀片通过旋转轴连接一小型直流电机固定在中空主体前端,可进行高速旋转以清除障碍物。推进机构主体外侧前部有三组支撑轮,后部有三组驱动轮,其均由气弹簧与主体或电机联轴器相连,气弹簧作为轮轴支架,能够起到避震效果提高机器人运动过程的稳定性。支撑轮均匀固定在中空主体前部的圆周面上,沿管道内壁径向运动;驱动轮与管道径向呈一10度至30度之间的夹角沿管道内壁径向倾斜运动,具体角度根据管道材质等因素进行调整,保证该推进机构能在管道内自由运动。该推进机构前进动力由位于主体后部的主直流电机提供,利用相应驱动模块控制机器人在管道内部进退[2]。
1.2 多种参数感知模块和拍照记录存储模块
机器人装载的参数感知模块包括检测温度和湿度的温湿度传感器、检测管道内气体浓度的气体浓度传感器、检测管道内气压的环境气压传感器、检测管道内是否有漏光现象的光照度传感器和检测管道倾斜度和较大异物的重力传感器,多种感知模块协同配合能够实现对检测环境现场的综合分析。
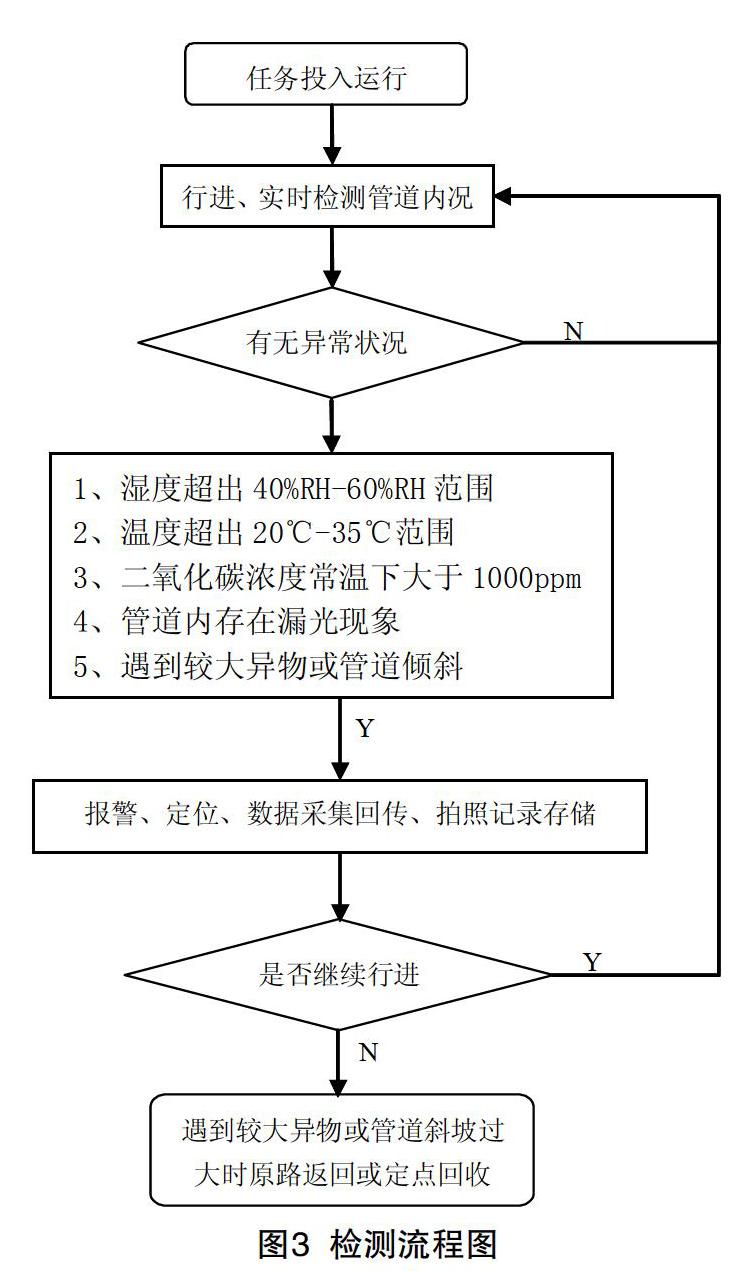
各检测模块采用总线式通用模块化控制方式,可在一定程度上自由组合,达到设备成本与检测目的的最佳匹配,方便检测机器人的技术升级。机器人在执行任务前,由工程技术人员依据管道种类配置设定好相应参数,将管道待测段节点打开放入本设备,固定好机器人与管道相对位置后,即可在相应管道内部进行自动化测量监控。检测过程中能实时对管道内的温湿度、特殊气体浓度、气压、光照度等参数进行测量。當遇到管道内囤积异物的情况,管道机器人会根据重力检测模块阈值报警,并启动摄像记录设备,对现场环境拍照定位,并与实时监测数据综合检测结果,存储备查,同时通过通信及数据传输模块向外部监测控制器反馈当前情况。
检测模块采用数字传感器进行数据采集,从而保障整体系统的精度;气压、光照与温湿度的配合检测可综合防范易燃易爆气体的在管道运输中可能产生的危害;通过重力传感器获得的数据来掌握机器人行进过程中的实时姿态,借此判断是否遇上管道内存在的异物或管道自身的倾斜方向,同时决策进一步的行进方案。拍照记录存储模块由固定在推进机构前端的摄像头、照明设备及位于机器人内部的数据存储卡和显示器组成,可对行进过程中遇到的异常情况拍照记录并能加载到显示器,该模块采用协处理单元的模式,与数据综合处理模块通过通讯方式关联,共同完成检测任务[3]。
2 机器人控制系统
机器人的控制系统设计主要是为了实现对检测机器人的运动控制和环境信息采集传输过程的综合处理,其硬件设计如图2所示[4]。
数据综合处理模块采用MSP430系列单片机作为主控芯片,对电源、驱动模块、通信及数据传输模块、多种参数感知模块显示及拍照记录存储模块集中管理。机器人与外部监测控制器通讯因受具体管道环境影响,采用无线与有线两套方案,执行任务期间采用自动控制运行,通过设备间通信方式可实现人工辅助操作[5]。机器人检测流程如图3所示。
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年11期)2019-07-04
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
电子制作(2017年9期)2017-04-17
电子制作(2017年19期)2017-02-02
电子制作(2016年21期)2016-05-17
电子设计工程(2015年15期)2015-02-27
电子设计工程(2015年8期)2015-02-27
