
一种高效的自适应双边滤波方法
2019-01-08 08:37程卓越
数字技术与应用 2019年10期
关键词:图像去噪
程卓越
摘要:本文提出一种高效的自适应双边滤波方法。实验显示,本文所提出的方法在不同强度的噪声情况下要优于其他的改进型自适应双边滤波方法。
关键词:双边滤波;图像去噪;灰度方差
中图分类号:TN911.73 文献标识码:A 文章编号:1007-9416(2019)10-0121-03
在当今时代,图像处理因数码设备的普及而成为信息领域的热门研究方向,主要致力于解决人们在获取图像时所附带的噪声而降低图像质量的问题[1]。而双边滤波就是一个能在去除图像噪声的同时能较好地保留图像边缘细节的滤波方法。传统的双边滤波方法通过手动设置滤波参数的方法进行滤波,但仅凭经验人工设定参数的方法不能保证设定参数的合理性,且存在一定的随机性,于是有必要设计一种自适应双边滤波器[2]。文献[3]中提出了一种新的自适应双边滤波方法,但是该方法在对强噪声点的处理时通过强制增大空域标准差的方法减弱噪声影响,造成全局式的去噪,导致图像模糊。对于上述问题,本文提出了一种自适应双边滤波方法,使用中值滤波方法对强噪声进行处理,保证在滤除强噪声时不会损害原始图像。
1 改进型双边滤波算法
1.1 双边滤波算法原理
双边滤波是一种非线性滤波器,它可以达到保持边缘、降噪平滑的效果。双边滤波的两个权重概念就是空间域与像素范围域。以下是双边滤波的基本公式。
双边滤波的核函数是空间域核与像素范围域核的综合结果:在图像的平坦区域,像素值变化很小,对应的像素范围域权重接近于1,此时空间域权重起主要作用,相当于进行高斯模糊;在图像的边缘区域,像素值变化很大,像素范围域权重变大,从而保持了边缘的信息。
在上面的式(1)中,σr和σd是平滑参数,他们的值随机给定,I(i,j)和I(k,l)是任意点(i,j)和(k,l)的像素值。最后,w(i,j,k,l)是权重值。括号里的第一个算式是求空间上任意一点到周边的点的距离的权重,第二个算式则是算任意一点和给定窗口内其他点的像素权重。式(2)表示的是去掉噪声后的图像,w为空间域权值和灰度域权值的乘积。
1.2 自适应双边滤波算法
首先,先读取视频图像的序列,然后将序列值赋给一个输入变量,确定取出的块的大小。空域方差随机给出,然后通过整个图像分块的for循环先计算出任意点的像素值,之后再使用一个单个块中的for循环计算块中所有像素值的方差,再由开方获得标准差,这也是像素域方差值。由于此次实验是取3乘3的空域空间进行滤波,我们使用for循环获得当前像素点x轴和y轴附近的值并代入计算像素域距离权重的公式计算权重,之后再用横纵坐标的差值计算空域的权重,最后得出了总的权重值。
此方法中的标准差参数需要手动调整,所以只能根据实际情况进行改动。因此本文提出了一种标准差自适应方法。
(1)空间标准差:因为函数包含了[-2,2]范围内95%的分量,所以空间标准差σ取值为R/2,R为滤波模板半径,用来限定σ的大小。
(2)灰度标准差:相比于空间标准差,双边滤波的效果更易受灰度标准差的影响并且灰度标准差越小,所滤波出来的图像细节就能更好的被保留。根据文献[4],灰度标准差的取值和添加了噪声后图像的噪声方差有关,该文献讨论了在不同噪声方差取值的情况下灰度标准差的最优值并对两个参数的取值作图,得到了σr和σn的线性关系,最后我们取σr=2σn。
1.3 强噪声的滤除
传统的双边滤波方法无法去除强噪声,因为强噪声的像素和图像的所在区域内的其余像素值差别较大且滤波时受到灰度域权值的限制,强度较大的噪声在被滤波后效果不明显。
2 实验结果
本文的实验是在Matlab2015b上进行仿真实验的,同时也将文献[3]中的方法进行仿真对比以验证本文算法的效果。在实验中,原图像,添加噪声后的图像,文献[3]中的圖像和本文方法的图像会同时给出。传统双边滤波方法的预设值参照文献[3]设置为σs =8,σr=0.1。
2.1 主观分析
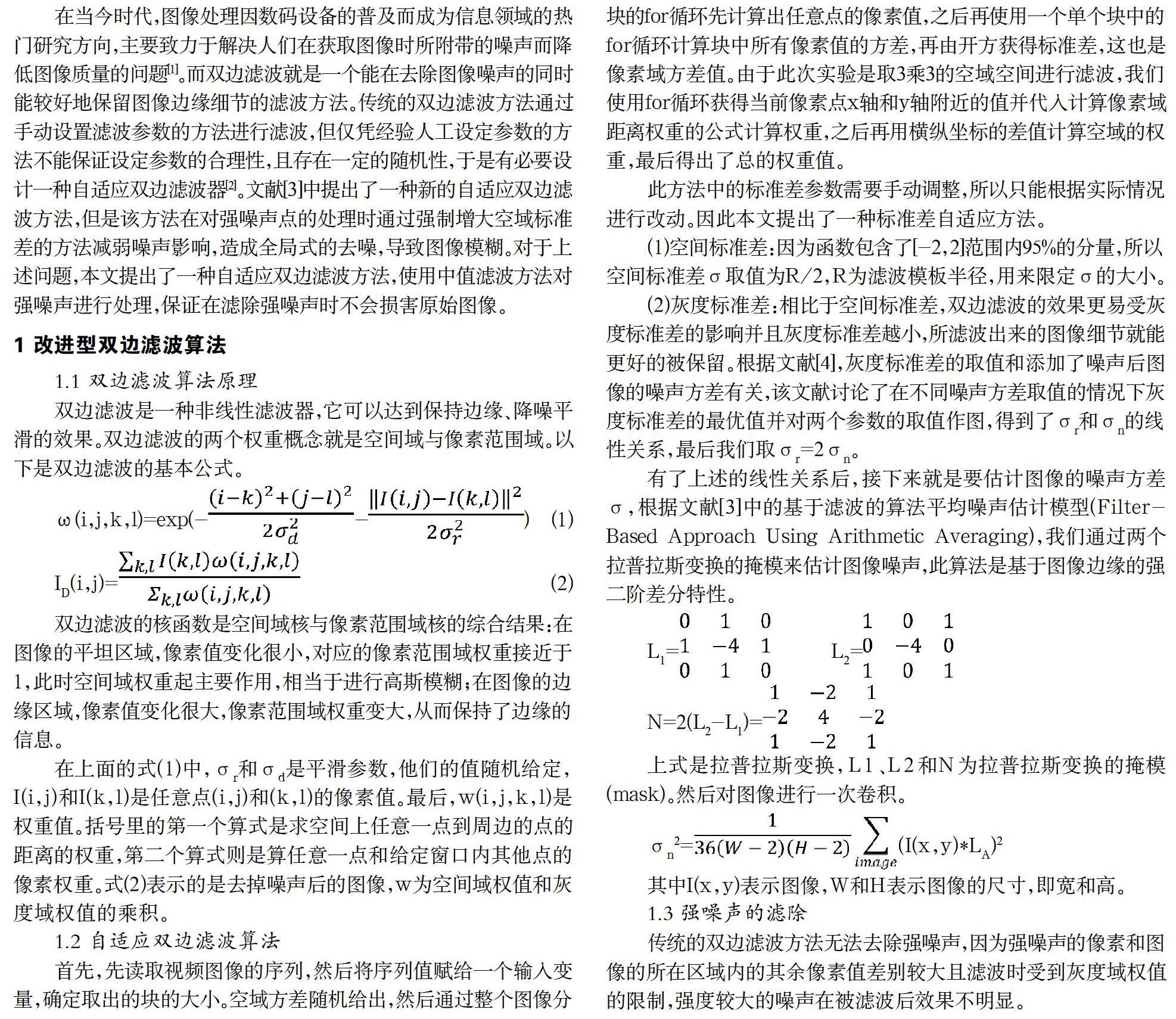
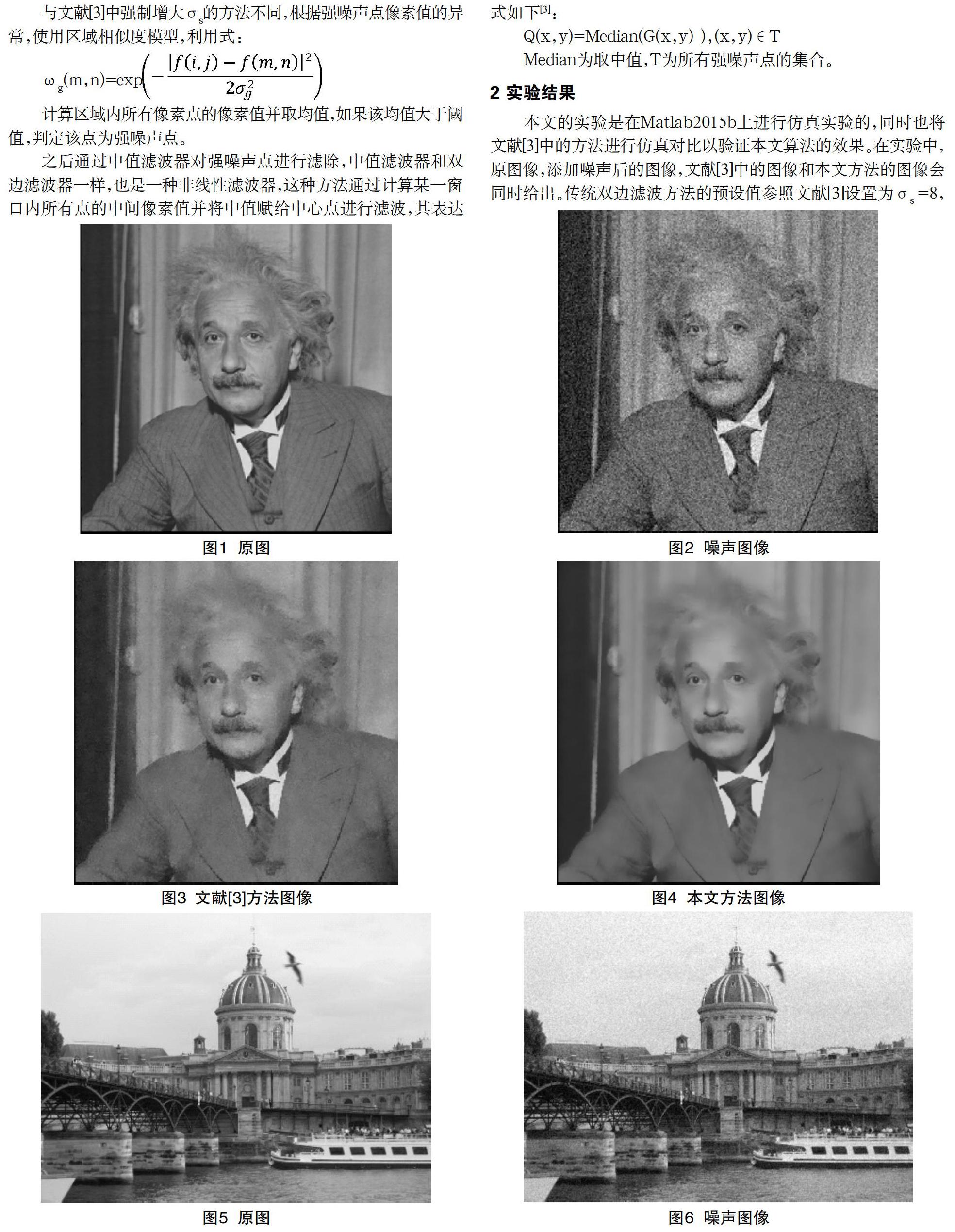
本实验中选用了256X256的Einstein和academy图像。在两幅图像中都加入标准差为10的高斯白噪声。两幅图像的原图,添加噪声后的图像和使用两种滤波方法后的图像如图1-8所示。
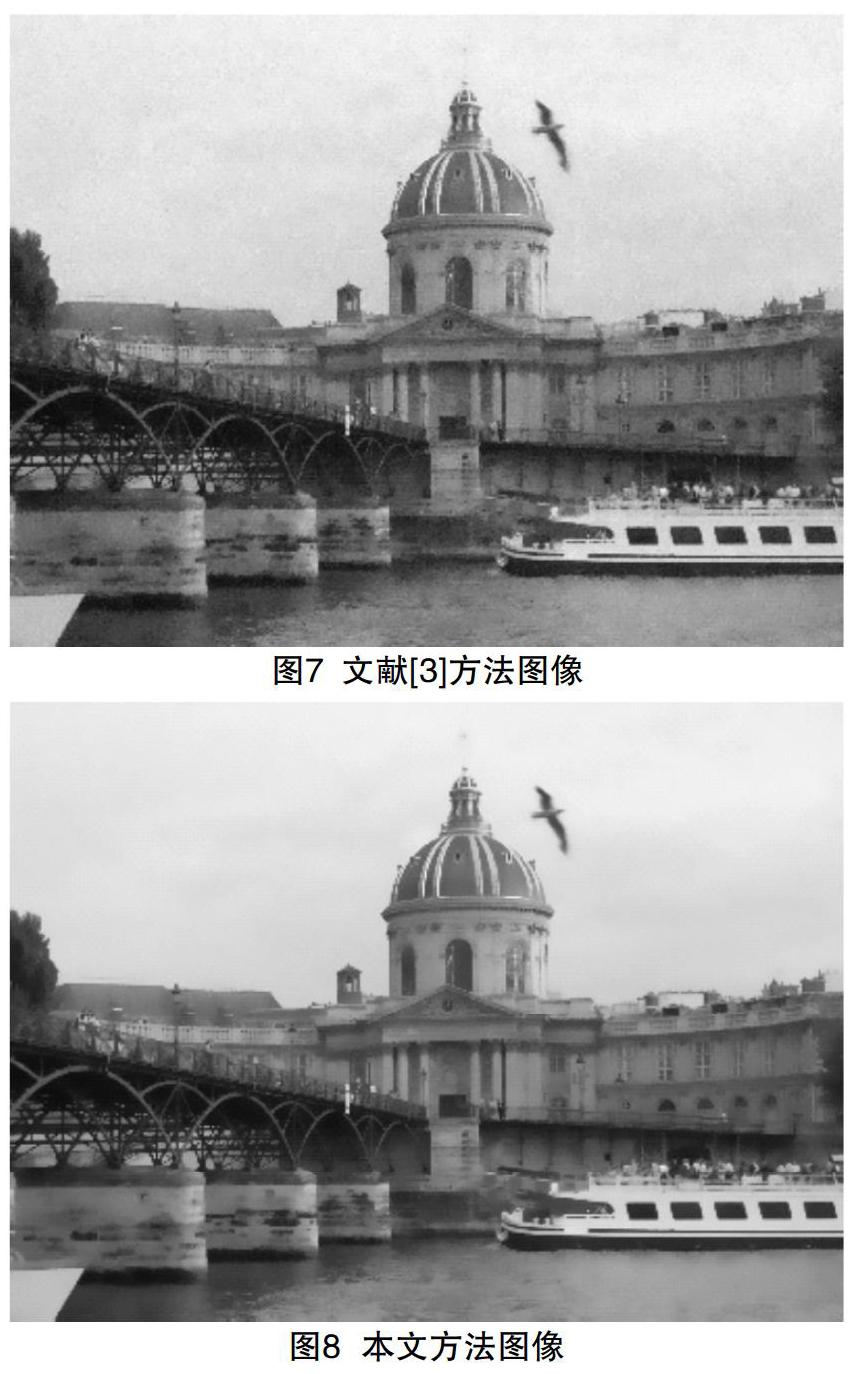
在图1-4中,可以发现在使用文献[3]的方法后,噪声图像的强噪声点大幅减少但细看后还是有零散的强噪声点,并且在头发的边缘区域出现了平滑现象,不少边缘细节有模糊现象。在噪声图像使用了本文的算法后,相比于文献[3]的图像,几乎看不见强噪声点,边缘细节特别是头发边缘的图像保留完整且清晰,并且脸部和衣服区域的图像更为平滑。在图5-8中,虽然效果不太明显,但可以发现,相比于文献[3]的结果,图8中的桥墩,游船和建筑物保留了更多的图像细节与原图像素点并且图7少量的强噪声点也在图8中被滤除。综上所述,本文所采用的双边滤波算法有更好的保边去噪效果,所以整体上优于文献[3]的算法。
2.2 客观分析
在比较图像效果的同时,本文也使用PSNR(信噪比peak signal to noise ratio)和SSIM(结构相似性structural similarity index)来客观的评价两种滤波方法。信噪比是图像信号与噪声的功率之比,但因为功率很难计算,可用方差比近似。信噪比越大,则表示图像的失真程度越小,细节保留的更完整。结构相似性是衡量两幅图像相似度的指标,其范围从0到1,当两张图像完全一样时,SSIM值为1。下表表示在加入不同噪声后,Einstein和Academy图像的PSNR和SSIM值。
从表1中可知,在σr =10时,对于两幅图像,本文实验的PSNR和SSIM值均高于文献[3]中的对应值,Einstein图中PSNR约高出0.5,SSIM高出0.016,Academy图中PSNR约高出0.9,SSIM高出0.04。σr=20时,Einstein图中PSNR约高出1.2,SSIM高出0.06,Academy图中PSNR约高出1.1,SSIM高出0.05。根据表中数据,可以说明本文的算法要好于文献[3]的算法。
3 结语
本文对文献[3]中的自适应双边滤波算法进行改进,主要优化了强噪声滤除步骤的方法,采用强噪声判定和中值滤波的思路,滤除了更多的强噪声点,图像的细节更加平滑,边缘部分也得到了更多的保留同时也采用自适应σr取值避免了人工设置参数的不合理性。实验显示,本文的双边滤波算法的保边去噪效果要好于文献[3]的算法,同时该方法对于边缘细节较多的图像噪声值估计较大,滤波效果不太理想,这也是本文算法有待改进的地方。
参考文献
[1] 邱宇.基于双边滤波的图像去噪及锐化技术研究[D].重庆大学,2011.
[2] Bo YU,Guo L,Qian X L.A New Adaptive Bilateral Filtering[J].Journal of Applied Sciences,2012,30(5):517-523.
[3] 余博,郭雷,钱晓亮,赵天云.一种新的自适应双边滤波算法[J].应用科学学报,2012,30(5):517-523.
[4] ZHANG Ming.Bilateral filter in image processing[D].Baton Rouge:Louisiana State University,2009.
猜你喜欢
科技与创新(2016年14期)2016-07-23
哈尔滨理工大学学报(2015年5期)2016-01-19
现代电子技术(2014年8期)2014-09-27
现代电子技术(2014年8期)2014-09-27
现代电子技术(2014年13期)2014-07-09
