
高架轨道式自动化集装箱码头仿真建模与分析
2019-01-08 03:28:02周鹏飞李玉登范璐璐姜萌
上海海事大学学报 2018年4期
周鹏飞,李玉登,范璐璐,姜萌
(大连理工大学建设工程学部,辽宁 大连 116024)
0 引 言
随着国际贸易和集装箱航运业的发展,集装箱船舶趋于大型化。码头吞吐量的增长和船舶的大型化都对码头装卸能力和效率提出了更高的要求。为适应航运业的发展需求和应对人力成本的不断攀升的现状,国内外许多大中型港口(如上海港、青岛港、鹿特丹港等)都在积极发展自动化集装箱码头。新型自动化集装箱码头是该领域的重要研究方向。
近年来,针对新型码头系统发展:宓为建等[1]提出了梭车式自动化集装箱码头系统,以减少集装箱在堆场海侧与陆侧之间的转运时间,研究表明梭车式码头作业系统能有效减少堆场翻箱作业,提高码头装卸效率;梁燕等[2]提出了一种立体轨道式自动化装卸系统,并与现有码头装卸系统进行对比分析,研究表明立体轨道式系统在装卸效率和节能环保方面具有明显的优势;刘广红等[3]对10种典型自动化码头的总体布局模式进行了定性对比分析;PETERING[4]分析了集装箱码头堆场容量、内集卡数量等因素对岸桥平均利用率的影响;LIU等[5-6]仿真分析了营运条件相同的不同自动化集装箱码头装卸工艺系统,对比分析了其作业效率和码头效益;DEMIRCI[7]针对土耳其特拉布松港建立仿真模型,分析了集装箱码头吞吐能力的瓶颈问题;周鹏飞等[8]仿真分析了自动导引小车(automated guided vehicle,AGV)码头系统、自动装载小车(automated lifting vehicle,ALV)码头系统和立体轨道式码头系统的作业效率和设备利用率,研究表明立体轨道式码头系统的应用性更强,BAE等[9]也做了类似的研究;梁燕等[10]利用Witness仿真分析了立体轨道式自动化码头的工艺系统及其设备的作业效率和调度策略。
周强等[11]提出了一种新型立体交叉高架轨道式集装箱码头装卸系统,能够很好地解决集装箱码头港内和港外车流的组织和干扰问题,有效减少集装箱堆取的垂直移动距离。该系统还处于概念阶段,未见对其性能和配置进行较系统的定量分析的研究。本文在分析高架轨道式自动化集装箱码头系统装卸工艺的基础上,应用Plant Simulation构建仿真模型,仿真分析该概念系统作业性能指标。
1 高架轨道式自动化集装箱码头分析
高架轨道式自动化集装箱码头系统主要包括岸桥、高架轨道式水平运输系统、地面集疏运系统、轨道龙门吊、闸口系统等,其中高架轨道式水平运输系统由高架轨道、高架小车、变道控制系统(控制小车路径选择和分叉变道)等组成,典型布置见图1。[11]码头作业可分为高架轨道装卸船作业和地面集疏运作业。前者工艺流程为岸桥↔高架小车↔轨道龙门吊,以卸船过程为例:船舶靠泊后,岸桥抓取集装箱放置于高架小车上,高架小车在变道控制系统导引下搬运集装箱到指定堆场箱位,龙门吊抓取高架小车上的集装箱到目标箱位。后者工艺流程为外集卡↔轨道龙门吊,以集运过程为例:码头根据船舶计划安排外集卡进港交箱,外集卡将出口箱运送到指定堆场龙门吊臂下交接区,龙门吊抓取外集卡上的集装箱堆放到目标箱位。

图1 高架轨道式自动化集装箱码头示意图
高架轨道式自动化集装箱码头系统的特点:(1)装卸船作业采用的小车在高架轨道上行驶,与地面集疏运作业车流分离,可减少两种作业活动的干扰,提高码头装卸船效率;(2)高架轨道与岸桥和龙门吊距离较传统作业方式的更近,可缩短岸桥和龙门吊的吊具运行距离,进一步提高装卸船效率;(3)高架轨道伸入堆场内部,可有效缩短龙门吊大车移动距离,提高龙门吊堆取箱效率。
2 基于Plant Simulation的仿真模型
高架轨道式自动化集装箱码头系统是一个典型的离散事件物流系统,Plant Simulation是一个面向对象的图形化的仿真软件平台,对于解决大规模港口物流系统仿真问题具有很强的适用性。本文应用Plant Simulation构建高架轨道式自动化集装箱码头仿真系统,实现对码头装卸作业过程的模拟。在输入的基本参数一定的情况下,设计3种方案并获得不同方案下的输出数据,以此为基础分析高架轨道式物流系统的作业性能。
高架轨道式自动化集装箱码头作业系统涉及码头装卸船系统、堆场作业系统和高架小车水平运输系统,作业环节较多。为降低仿真模型的复杂性,必须结合建模的目标和原则,将码头实体和作业过程合理简化。本文对比分析高架轨道系统与传统码头系统的作业性能,以及高架小车数量与作业指标的关系。针对高架轨道式自动化集装箱码头各对象要素的特点选择主要仿真单元(表1),仿真流程见图2。主要事件仿真实现如下:
(1)船舶到离港和靠泊仿真。根据船舶信息表(TableFile),时间触发器Trigger调用Method单元生成船舶,用于模拟船舶到港。泊位空闲时船舶靠泊,否则船舶在锚地等待(Buffer)。船舶靠泊后更新泊位状态,并设置全局变量记录船舶剩余装卸任务。利用时间触发器Trigger调用Method单元判断船舶装卸作业是否完成,船舶是否满足离港条件。
(2)装卸船作业仿真。卸船过程仿真:船舶靠泊后,MultiPortalCrane模拟岸桥将集装箱(Entity)从船上卸到高架小车(Transporter)上,然后高架小车沿高架轨道(Track)驶入指定堆场箱区贝位(Sensors控制点),利用Track的出口控制Method单元模拟高架小车在轨道分叉道口的变道,StorageCrane模拟堆场龙门吊从高架小车上抓取集装箱并卸载到指定堆场箱区贝位,完成一个卸箱任务。装船过程与卸船过程相反,仿真方法与其类似。
(3)重卡交箱和轻卡取箱。重卡交箱:首先利用两个Source单元依据TableFile中的出口箱到港时间(由车辆到港分布产生)分别生成外集卡和出口箱,然后利用TransferStation加载生成到港重卡,利用SingleProc模拟重卡通闸检查,重卡通过地面车道(Track)行驶到指定堆场箱区贝位,StorageCrane模拟堆场龙门吊抓取外集卡上的集装箱并堆放到堆栈(Store),最后重卡完成交箱驶离码头。时间触发器Trigger调用Method单元依据进口箱出港时间生成轻卡,模拟轻卡到港,后续仿真与重卡类似。

表1 仿真模型采用的主要仿真单元
3 仿真与分析
3.1 仿真基本参数与模型检验
依据北方某码头资料设计仿真工况,3个顺岸式码头泊位,岸线长度1 000 m,每个泊位后方均设10个箱区,堆场容量50 400 TEU,码头共配置9台岸桥、30台轨道龙门吊和36辆高架小车,闸口设置6条通道,到港船型容量为1 000Int(U(1,8.2))TEU,装卸箱量为容量20%~40%的均匀分布。主要设备参数见表2。仿真系统可视部分见图3。
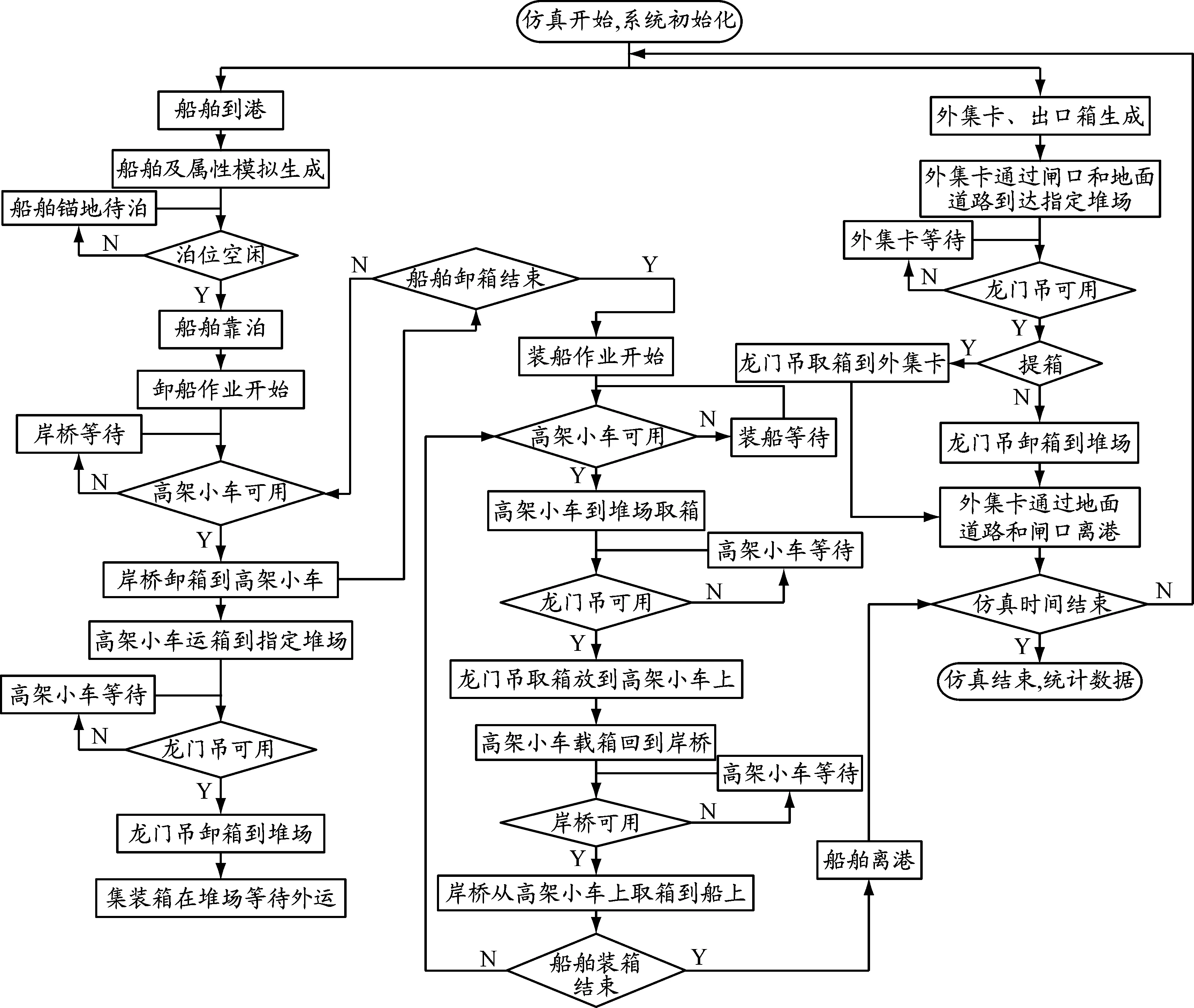
图2 高架轨道式自动化集装箱码头仿真流程

表2 高架轨道式自动化集装箱码头仿真系统参数
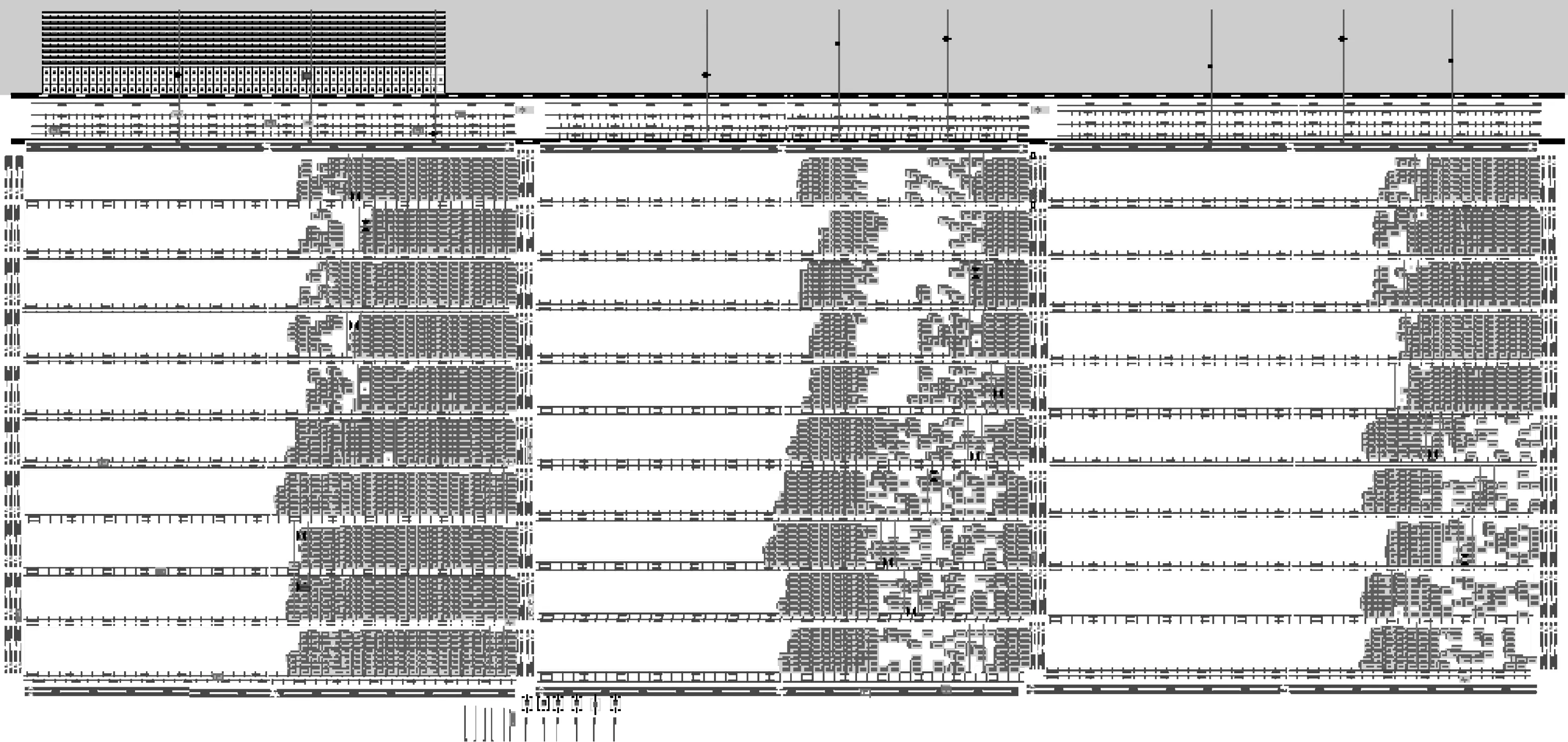
图3 高架轨道式自动化集装箱码头仿真系统截图
仿真系统的检验:通过检查仿真系统动态运行可以看出,过程仿真模型与概念系统流程吻合,且未发现仿真系统中岸桥、高架小车、集装箱位置、外集卡和闸口等模块运行异常;对输入分布进行假设检验,得到进出口箱在港堆存时间分布的检验结果(见表3)和堆场箱量分配的卡方检验结果(见表4)。表3中的显著性检验P值(双侧)为0.421(大于0.1),表明仿真试验的进出口箱在港堆存时间分布与假设无显著性差异。表4中的显著性检验P值远大于0.1,表明各堆场箱量分配无显著性差异。
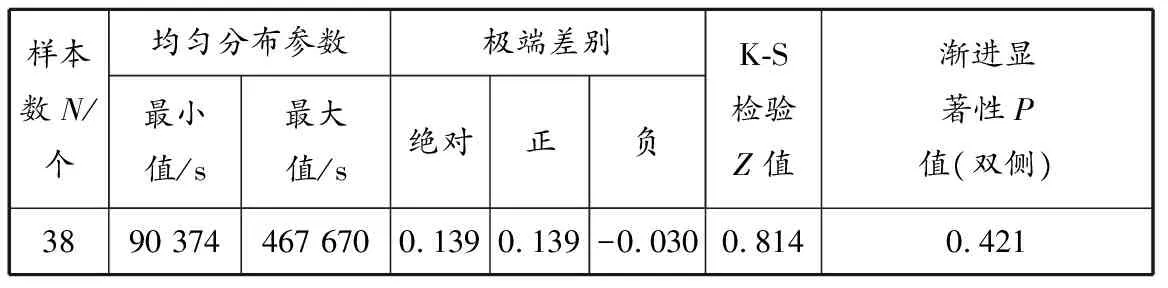
表3 进出口箱在港堆存时间分布的K-S检验

表4 堆场箱量分配的卡方检验
3.2 仿真分析
为了对比分析高架轨道式自动化集装箱码头性能和车辆配置影响,设计多组仿真工况(见表5),其中方案A和C为高架轨道式系统,方案B为传统地面AGV系统,仿真参数设置相同,仿真时长为1 a。

表5 仿真工况参数设置
表6为两种不同工艺系统的码头服务水平(船舶平均在港时间、岸桥装卸效率)和资源占用率(泊位和岸桥占用率)指标的对比。由表6可以看出:(1)高架轨道式系统较传统地面AGV系统的船舶在港时间平均减少6.8%,船舶装卸时间平均减少6.3%,岸桥台时效率平均提高5.8%,显著改善了码头服务水平;(2)与传统地面AGV系统相比,高架轨道式系统的资源利用率有下降的趋势,如泊位利用率平均降低7.3%,岸桥利用率平均降低6.9%,小车利用率平均下降9.0%,明显节约了码头资源,提高了码头装卸作业能力。高架轨道式系统较传统地面AGV系统的优势在于该系统实现了码头装卸与集疏运的车辆分流,避免了交通拥挤和等待,并且由于高架小车位置高,可以节省场吊和岸桥的抓取移动距离。

表6 两种码头系统的作业指标对比
由图4可以看出:高架小车配置数量与码头主要指标呈近似二次关系(拟合优度检验R2均大于0.99);当高架小车配置数量较少时,增加车辆配置数量可显著提高码头服务水平,减少资源占用率,如高架小车配置数量从3辆增加到5辆时船舶平均在港时间缩短29.9%,岸桥台时效率提高25.0%,泊位占用率下降21.3%,岸桥占用率下降18.9%;随着高架小车数量的增加,相关指标改善程度越来越小,如高架小车配置数量从5辆增加到6辆时,各项技术指标改善很小。

a) 船舶平均在港时间
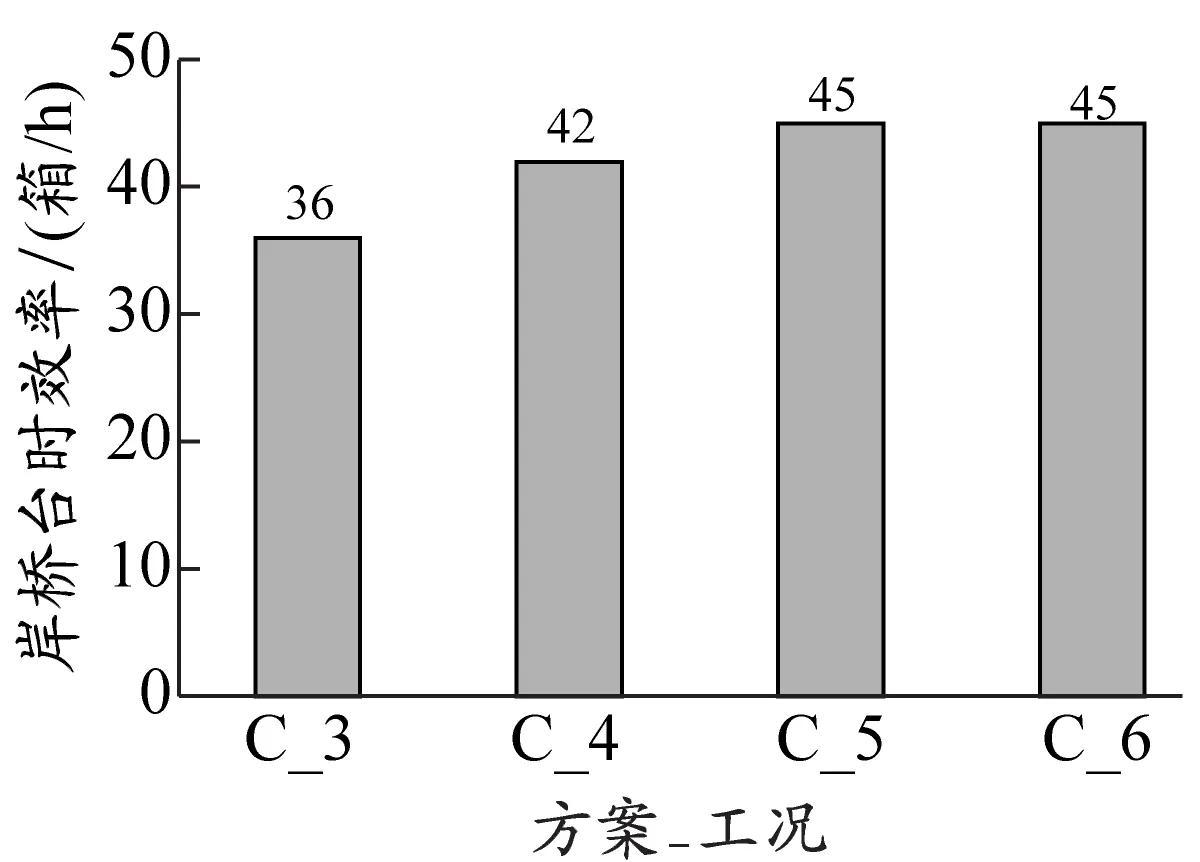
b) 岸桥台时效率
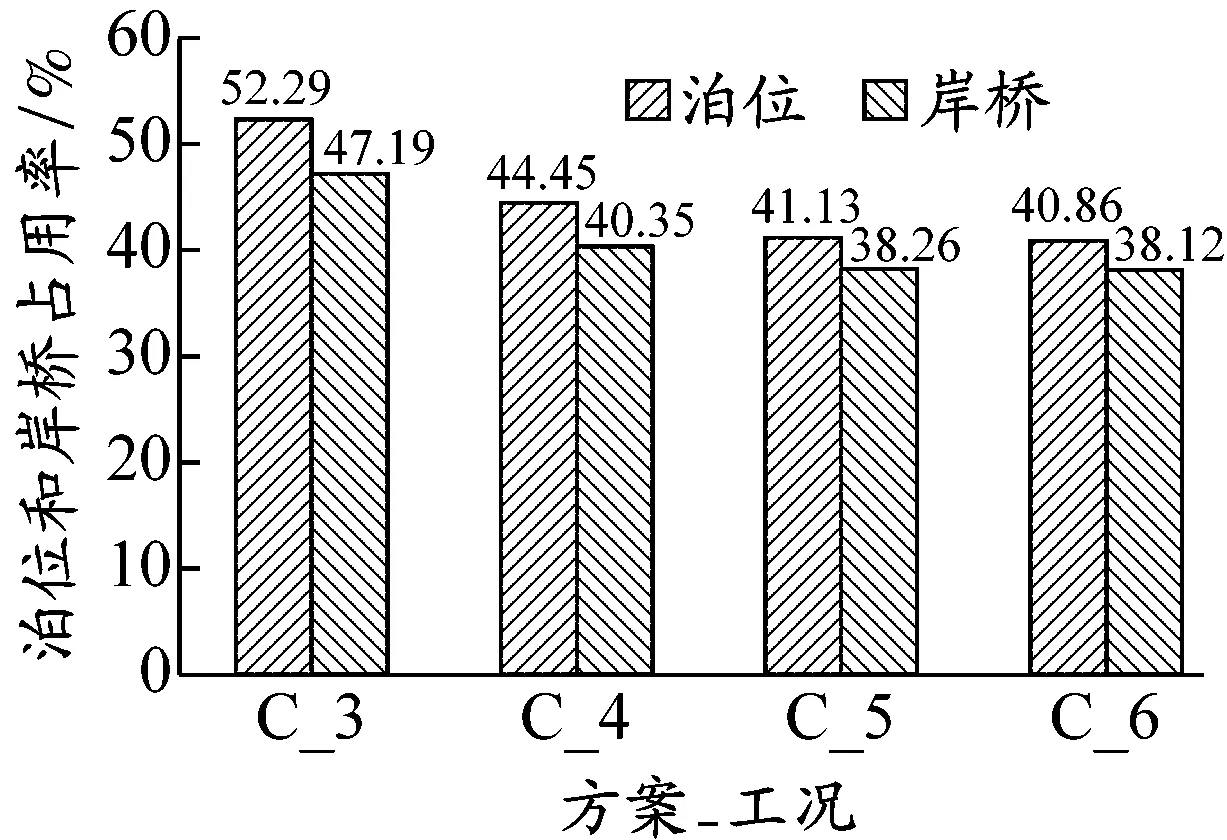
c) 泊位和岸桥占用率
4 结 论
在分析高架轨道式自动化集装箱码头装卸工艺系统(简称新系统)的基础上,应用Plant Simulation构建了集装箱码头仿真模型,对其进行了仿真分析。仿真表明:(1)应用Plant Simulation构建的仿真模型满足仿真验证条件,仿真模型具有可信性;(2)在相同岸线、岸桥和堆场资源条件下,新系统的服务水平和资源占用率指标均比基于地面AGV的自动化集装箱码头系统的好,船舶在港时间平均缩短约6.8%,岸桥台时效率平均提高5.8%,节约码头资源占用率约7.0%;(3)高架小车配置数量与码头主要指标呈近似二次关系,仿真工况中小车配置从3辆增加到5辆时船舶在港时间显著缩短,岸桥台时效率提高25.0%,当车辆配置数量大于5辆时码头主要指标基本没有变化,故各作业线上的高架小车配置不宜过少,建议5~6辆。研究成果可为高架轨道式自动化集装箱码头的后续研发和设计提供参考。
猜你喜欢
智能建筑电气技术(2022年2期)2022-02-06 02:30:50
铁道建筑技术(2020年11期)2020-05-22 06:26:38
工程与建设(2019年1期)2019-09-03 01:12:32
运筹与管理(2019年1期)2019-02-15 09:26:42
经济技术协作信息(2018年20期)2019-01-19 02:56:44
设备管理与维修(2016年6期)2016-03-16 02:21:57
石油化工建设(2015年6期)2015-12-01 04:17:27
石油化工建设(2015年6期)2015-12-01 04:17:27
集装箱化(2014年12期)2015-01-06 18:31:36
集装箱化(2014年10期)2014-10-31 18:28:10
