液体火箭发动机多维力测量装置原位校准技术研究
2019-01-07 06:28:40李志勋王宏亮赵印明陈柯行
计测技术 2018年5期
李志勋,王宏亮,赵印明,陈柯行
(1.西安航天动力试验技术研究所,陕西 西安 710100;2.航空工业北京长城计量测试技术研究所,北京 100095)
0 引言
火箭发动机多维力测量技术一直以来是发动机测试领域所关注的重点[1]。近年来,六分力测试转台和六分力天平已成为火箭发动机试验领域广为采用的多维力测量方式,发动机设计过程中也已逐步将真空多维力测量列为常态化试验需求。其中文献[2-3]采用了六分力测试转台的测试方案,文献[4-5]采用了六分力天平的测试方案。受传感器安装状态、推进剂供应管路约束、现场环境温度变化等影响,多维力传感器出厂时的实验室校准系数,已不适用于液体火箭发动机试验现场测试使用。
目前,关于如何测准和测全发动机多维力已成为试验过程高度关注的问题。为提高多维力测量精度,针对发动机多维力测量装置开展试验现场原位校准技术研究,建立了一套多维力测量与现场原位校准一体化装置,重点解决真空环境远程控制、精确自动校准问题,通过分析真空、温度、管路约束等对多维力测量的影响,提出相应的解决措施,降低试验系统各个环节对多维力测量所造成的不利影响,为发动机多维力测量提供了保障条件。
1 多维力测量与校准系统原理与组成
发动机多维力测量与校准一体化装置主要由推力测量系统、推力原位校准系统、数据采集与显示系统组成,系统原理如图1所示。多维力传感器作为被校准对象,标准力传感器用于溯源;力源加载装置用于提供标准力源,采用伺服电机与电动缸方式加载标准力源。

图1 校准系统示意图
多维力测量系统由定架、推进剂供应管路、控制气管路、测量线缆、力源加载转换器、多维力传感器、采集系统、采集计算机及解耦软件构成。力源加载转换器设计为圆盘形式,用于连接标准力源加载电动缸与多维力传感器将标准力源加载力传递到多维力传感器上。测量时,力源加载转换器则用于连接发动机与多维力传感器,其实物如图2所示。校准软件用于实现校准过程的自动化控制以及校准后的数据处理,实现X向、Y向、Z向、X轴扭矩、Y轴扭矩、Z轴扭矩的校准,测量与现场校准装置。

图2 多维力测量与现场原位校准一体化系统
多维力原位校准装置用于实现发动机点火前推进剂供应管路、控制气管路、测量线缆约束下的校准;多维力传感器是四柱式高精度电阻应变式力传感器,为被校对象[6],如图3所示。

图3 传感器样机及配套仪表样机
2 多维力测量装置自动快速精确校准技术
2.1 自动快速精确校准技术
发动机点火试验在高空模拟试验舱内进行,而真空舱为卧式结构,如图4所示。进行推力测量时,发动机安装状态为水平安装。发动机进行高空模拟试验时舱门封闭,扩压器后端蒸汽引射系统工作维持真空,由于蒸汽引射系统的工作时间有限,发动机必须在有限的时间内完成高空模拟试验的性能测量与校准过程。试验时间紧、成本高是发动机高空模拟试验的一个显著特点[7],这要求多维力原位校准系统具备真空环境下标准力源的精确加载、力源加载的快速、远程以及自动控制的特点。

图4 发动机火箭试验系统
采用基于电动缸的力源加载方式,控制原理如图5所示。为实现标准力源的自动快速加载功能,主要采取精确加载、快速加载及远程自动控制技术。
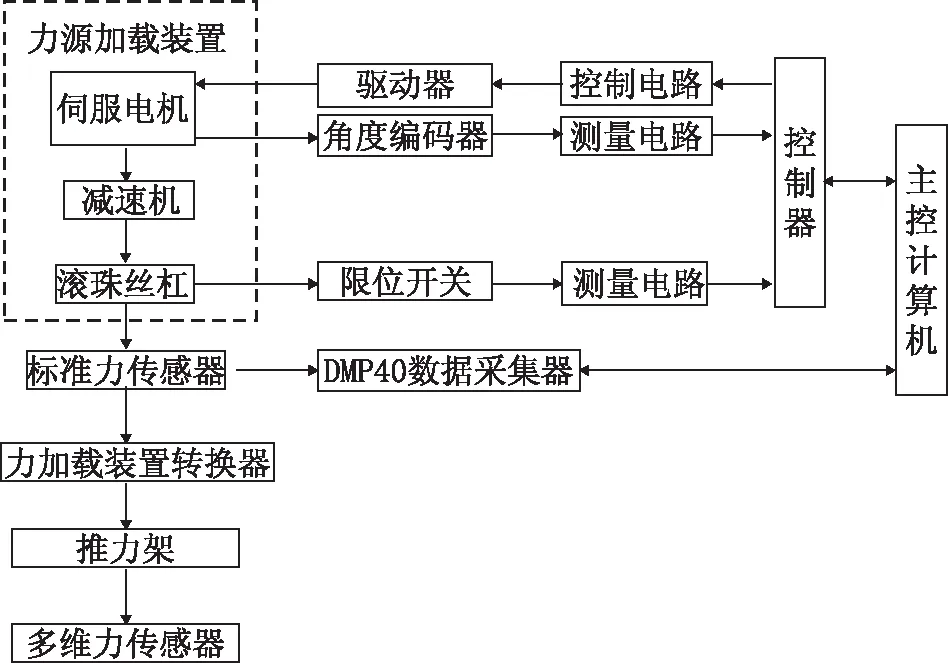
图5 自动快速校准力加载控制原理
1)精确加载技术
标准力传感器误差优于0.005%,DMP40测量误差优于0.003%,可确保标准力源的测量误差优于0.01%。标准力源加载通过对伺服电机的细分控制[8]来实现,当标准力传感器测量值与设定值的偏差小于0.3%时,停止电机转动并维持不少于5 s的稳定时间。
2)快速加载技术
采用模糊控制器技术对力源加载过程进行快速调节。按照标准测量力值与设定值的偏差大小,将力源加载过程分为两段:大偏差段和小偏差段[9],大偏差段大于等于80%,小偏差段小于等于20%。在大偏差段控制电动缸以较高的位移速度进行运动,实现短时间内小超调的条件下到达小偏差区。在小偏差段控制电动缸以低的位移速度进行运动,消除扰动及滞后的影响,实现对力源加载的高精度控制。
3)远程自动控制技术
真空环境下的推力现场校准必须解决远程自动加载力源的问题。主控计算机放置于远端测控中心,与DMP40数据采集器和控制器建立远程通讯连接,校准软件按照六档三遍[10]的预定程序控制电动缸进行力源加载,如图6所示,加载档位不少于33档,每档驻点时间可调(最长10 s)。
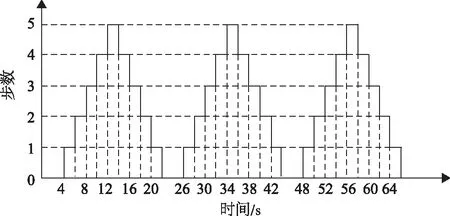
图6 典型控制程序图
2.2 自动加载性能测试
在100 Pa真空环境下,采用自动校准软件分别对Fx(水平),Fy(垂直),Fz(主推),Mx,My,Mz进行力源加载输出调试,其测试数据见表1。

表1 标准力源输出
由表1知,Fx,Fy,Fz标准力值的输出误差均优于0.03%,Mx,My,Mz扭矩的输出误差均优于0.05%。每一个方向按照三遍六档的加载时间由手动加载的40 min缩短为自动加载的12 min,实现了快速校准功能。
3 多维力测量不确定度影响因素分析及解决措施
3.1 温度影响分析
受发动机点火过程中热辐射及热传导的影响,多维力传感器各个测力组件的弹性模量特性发生改变,导致推力测量的零位及灵敏度出现偏差。为分析发动机多维力测量过程中的温漂影响,将整套多维力测量系统放置于高低温试验箱内,如图7所示,对其进行不同温度环境下的推力原位校准。

图7 高温环境下的推力校准
采用高低温试验箱分别建立0,20,40,60,80℃等温度环境条件,开展多维力测量装置的校准工作,以获取不同温度条件下的多维力校准数据(表2)。由表2知,随着环境温度变化对传感器的系数有一定影响,最大影响量达到了0.5%。需要对多维力测量装置采取必要的防隔热措施,降低多维力传感器和标准力传感器受温度变化的影响。采用带水冷隔热装置后,再次对装置进行温度环境变化校准测试,结果显示采取隔热防护后(图8),测量装置受温度的影响降低。

图8 传感器水冷隔热罩

表2 不同温度下的校准测试
3.2 管路安装影响分析
推进剂供应管路是影响发动机推力测量不确定度的重要因素之一。受管路增压、高温及振动环境的影响,管路约束力呈非线性变化[11],在100 Pa,22℃环境下,分别对连接在测量装置上的氧化剂管路增压3 MPa、燃料管路增压3 MPa,并对多维力测量装置进行原位校准,获取相应的系数(表3)。采用硬管连接测量装置,因管路安装状态的影响,装置各向系数在管路增压后变化较大,尤其是在扭矩方向,需要对管路采取柔性设计以减低其安装误差造成的测量不确定度。
目前推进剂供应管路通常采用缠绕式结构来增加管路柔性、降低管路刚度,减小管路约束力。为满足管路“柔性+刚性”的设计要求,将推进剂供应管路设计成“Z”字型,如图9所示,在整体结构上保证入口管路垂直于主推力方向,并使氧化剂和燃料管道对称于主推力轴线。对于发动机入口附近的管路,设计为“U”型结构(近似为弹簧结构原理)[12],可将发动机点火所产生的微小位移消耗掉,减少入口管路带来的约束力。

图9 推进剂供应管路设计
采取柔性设计后,管路在增压后对Fx,Fy,Fz的系数影响明显小,对Mx,My,Mz力矩的系数影响有一定程度的降低。

表3 管路增压前后校准系数
3.3 真空环境影响分析
22℃条件下,分别在常压、50 kPa,1 kPa,100 Pa环境下对多维力测量传感器进行原位校准,由表4知,真空环境对校准系数影响较小。

表4 不同真空环境下的校准系数
4 结论
随着多维力测试技术在液体火箭发动机试验领域的逐步应用,真空环境下的原位校准工作显得尤为重要,已成为提高多维力测量精度的重要措施之一。针对某型号试验所用的多维力测量装置,本文开展了现场原位校准技术研究,分析了多维力测量装置不确定度的影响因素。试验测试结果表明:
1)快速自动校准系统加载精度高,分力力值加载误差均优于0.03%,扭矩的输出误差均优于0.05%。每一个方向按照三遍六档的加载时间由手动加载的40 min缩短为自动加载的12 min,实现了快速校准功能。
2)真空气压环境对推力校准系数影响较小,可忽略不计。而环境温度对推力校准系数影响明显,最大影响量达到了0.5%,有必要对矢量力测量传感器采用隔热防护措施。
3)试验管路增压对Mx,My,Mz力矩的校准系数影响明显,最大影响量达到了4.5%,管路增压下的原位校准是有必要的。
猜你喜欢
幼儿100(2024年19期)2024-05-29 07:43:34
中国特种设备安全(2022年4期)2022-07-08 02:43:48
未来教育家(2021年9期)2021-12-24 08:24:22
Chinese Physics B(2021年12期)2021-12-22 06:49:04
民用飞机设计与研究(2020年1期)2020-05-21 07:24:30
软件(2020年3期)2020-04-20 01:45:48
山西冶金(2019年2期)2019-05-31 11:30:04
天然产物研究与开发(2018年5期)2018-06-13 03:23:54
美与时代·城市版(2017年12期)2018-01-25 22:41:57
太空探索(2014年4期)2014-07-19 10:08:58