三维激光扫描技术在地形测绘中的应用
2019-01-07 00:58:54汪仁银李开伟
测绘通报 2018年12期
汪仁银,李开伟,陈 锐,叶 波
(1.四川水利职业技术学院,四川 成都 611231; 2.武汉海达数云技术有限公司,湖北 武汉 430023)
采用三维激光扫描技术进行地形测绘是对传统方式的重大变革。三维激光扫描技术结合了RTK技术,在测定扫描仪测站点定位和后视标靶坐标定向后,获得全景范围内可见面域空间点连续的三维坐标和影像,在视线不可及的地方再设站扫描,以致整个测区有重叠无漏洞。
1 作业流程
作业流程如图1所示。

图1 作业流程
1.1 外业数据采集
首先对测区周围环境进行踏勘,确定扫描仪和标靶的位置。一是要保证数据完整性;二是要尽量减少数据量;三是拍照便于数据处理、编辑修改。
1.2 点云数据配准
由于每次扫描只能得到测站为原点定义的一个局部坐标系中,在扫描区域中设置一些控制标靶,从而使得相邻测站至少有3个同名控制标靶,通过同名控制标靶对多测站数据统一坐标系。
1.3 地物的提取与绘制
地物特征点是在配准好的点云数据中提取的,如房屋角点、电线杆中心点等。可以利用后处理软件手工或算法拟合特征点,并以一定的格式输出到文本文件中。
1.4 地表数据获取
由于是对整个测区空间信息的扫描,包含了地表的所有信息,地表植被会影响等高线的自动生成,因此在生成等高线前需将非地表数据剔除,目前还没有相应的软件能做到完全自动化剔除。
1.5 等高线生成
扫描时距离设备较近时密度较大,对于地形测绘其点位太密且分布不均匀,需要抽稀处理。若直接用原始数据来构三角网追踪等值线,其细节信息过多,会导致等高线紊乱。因此,需剔除非地貌数据,按地形测绘要求的密度进行抽稀,最后导入对应数字测图软件中,自动生成等高线。
1.6 地形图编辑
将地物图形与等高线图形进行叠加、编辑,同时由于切除了地物部分数据,造成生成的等高线局部缺失、扭曲、不光滑等,需要对照照片及点云数据,手动进行修改,最后加上高程注记,生成图视图例图廓,进行局部修饰。
2 应用案例
2.1 山区丘陵地带野外地形
点云数据如图2、图3所示。
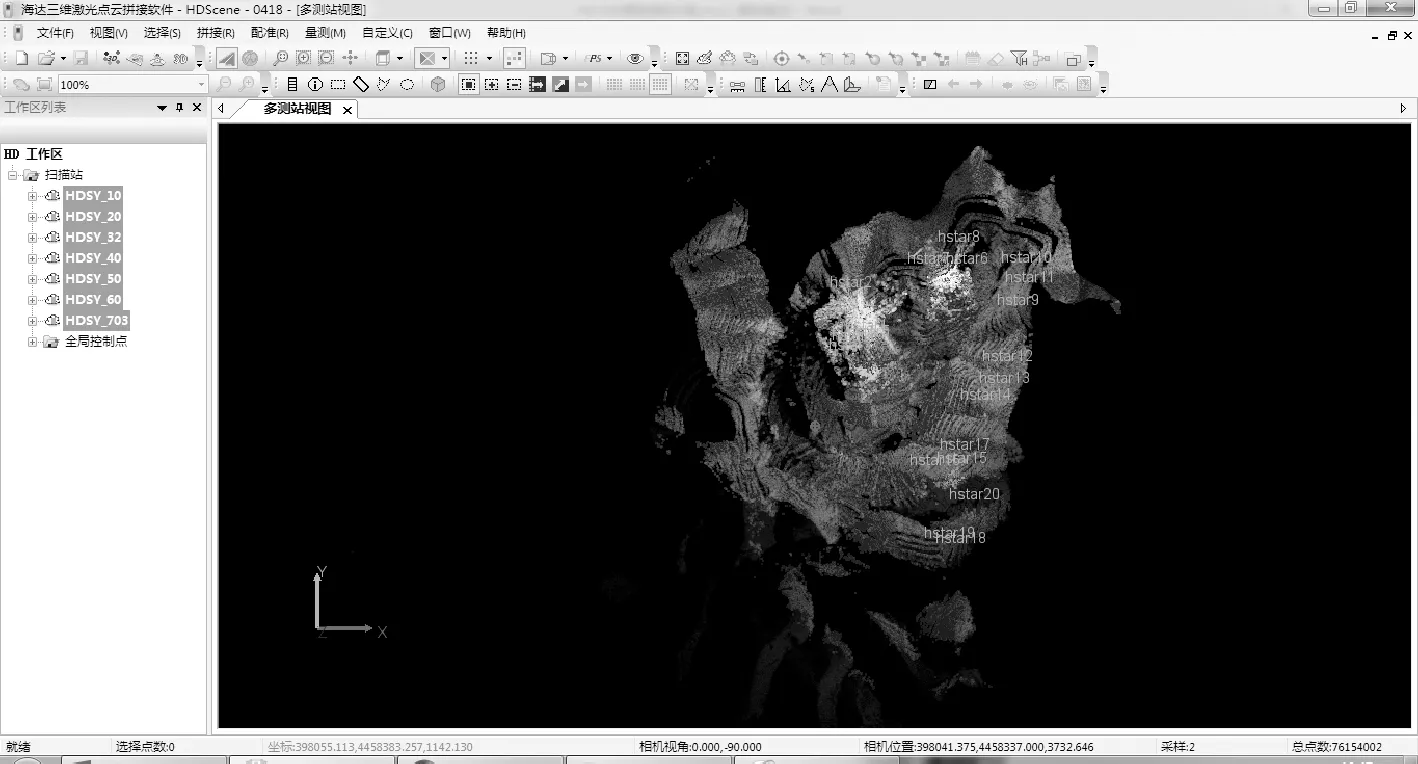
图2 每站点云用不同颜色显示

图3 距离扫描仪164 m处某棵树的两站点云效果
(1) 外业采集:架站10 min,采集13 min,运输7 min,平均每30 min一站数据。采集面积为0.883 km2。
(2) 内业处理:主要为拼接、坐标转换、去噪、等高线、地形绘制,10 min处理一站数据。
(3) 精度验证:由于多为山区地形,没有太多立面的房屋,不能很好地拟合交线与RTK打的房屋角点进行对比,因此在如下一个地方进行了精度验证试验。
2.1.1 坐标提取
在软件中提取特征点的坐标,将RTK坐标和点云坐标录入Excel中,对比分析3个方向的差值及三维距离,并分析均方差。
通过不同的颜色显示呈现两站点云,在不同距离上比较房屋角点与RTK实际测量的数值,进而统计出精度报表,如图4所示。
图4 RTK点坐标导入
将转换过坐标的房屋拐点点云坐标量测出来与RTK坐标比对、统计,如图5所示。

图5
2.1.2 精度对比
将RTK采集的对应特征点,与点云进行对比计算,得出平均值与中误差,如表1、图6所示。
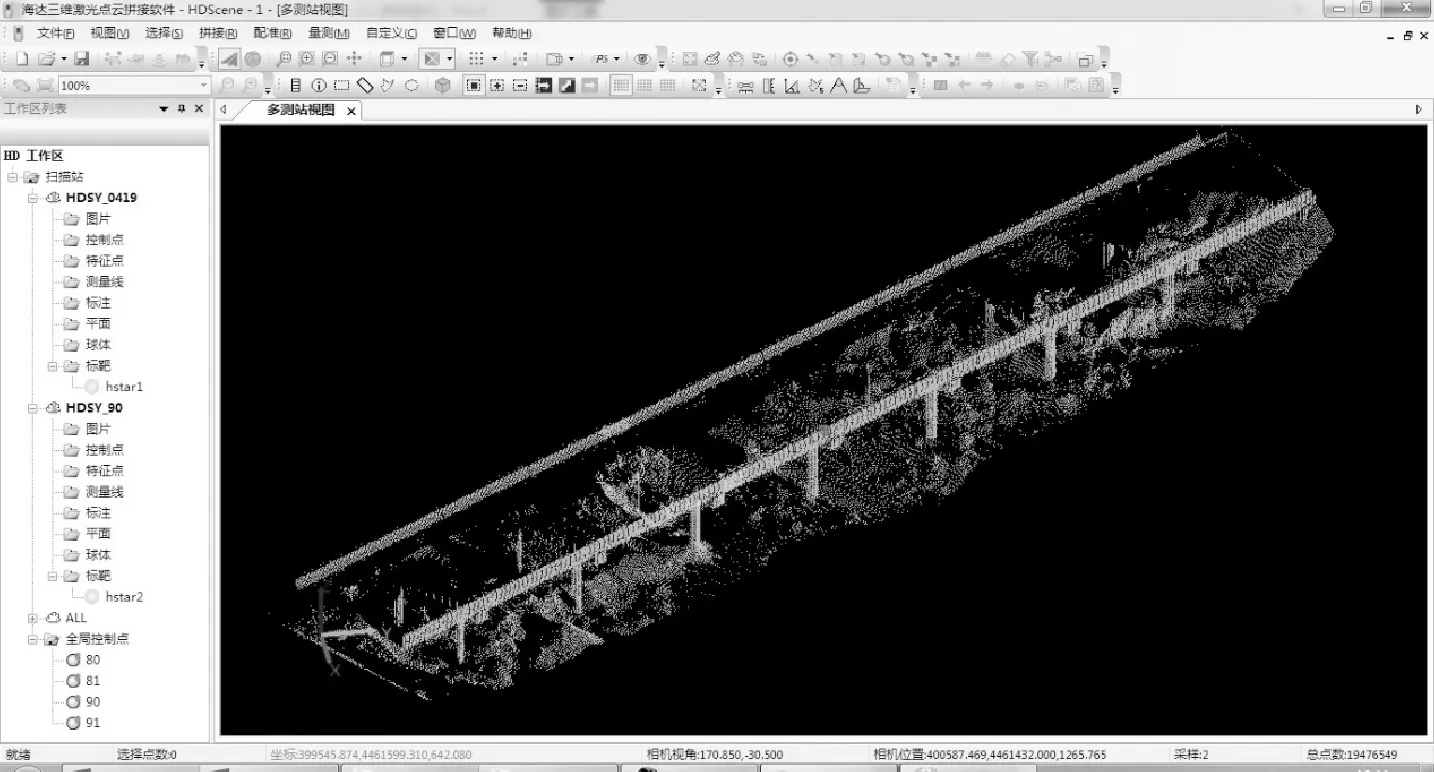
图6 桥面两站点云
由图6可知,在点云中两侧桥面的宽度为11.522 0 m,RTK数据在CAD中为11.521 3 m。差距为1 cm,足精度要求。

表1 精度验证
2.2 城市小范围测地形
(1) 精度验证比对方法:以实测坐标为基准,与点云中提取的坐标比对,统计其精度。
(2) 坐标提取:在软件中提取相应特征点的坐标,并分析均方差,如图7所示。
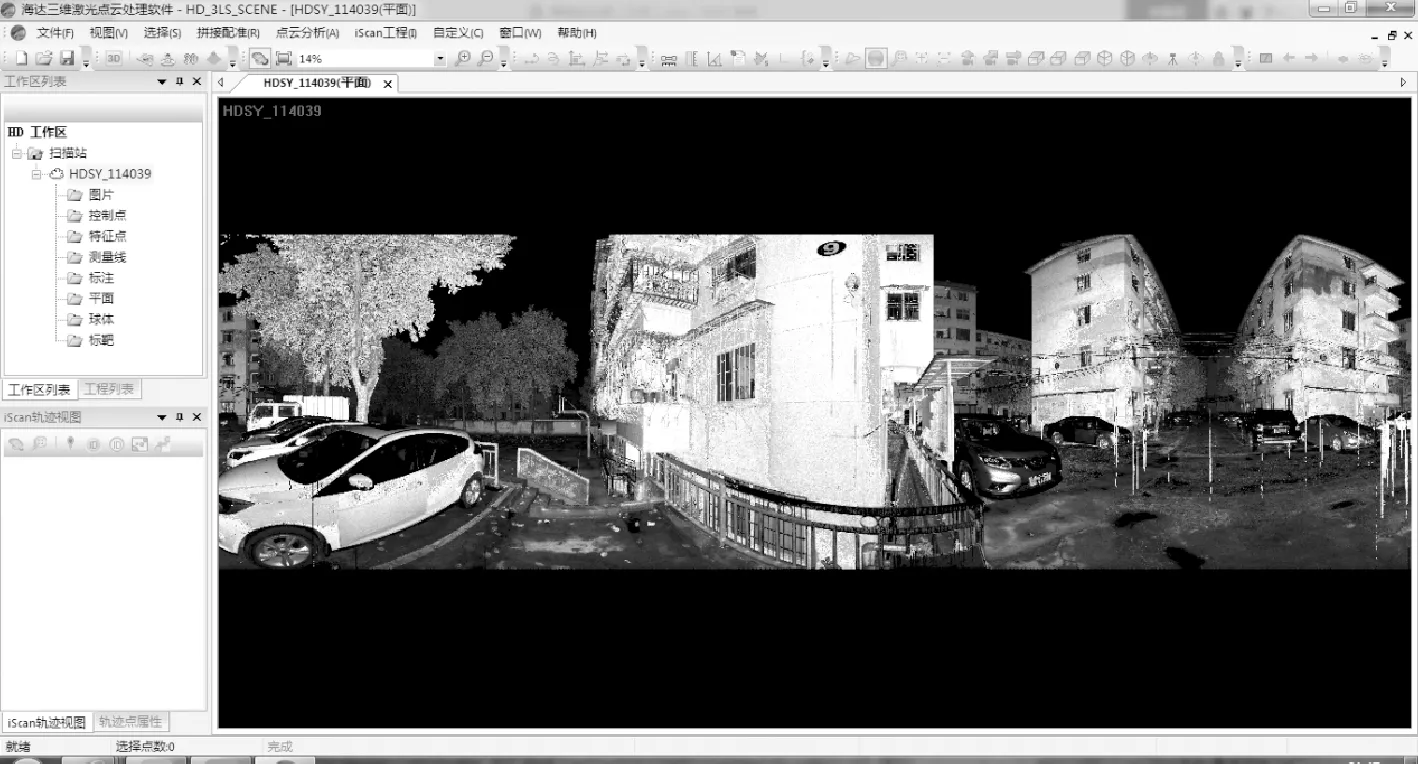
图7 全站仪测点与点云叠加(示例)
(3) 绘制地形图:在软件中绘制整个区域地形图,并量测对应两点间距对比点云间距,判定精度,如图8、图9所示。
(4)精度对比:由图8、图9可知,大楼的宽度(靠篮球场一侧)在点云距离为7.926 7 m,CAD中距离为7.916 7 m,差距为1 cm,满足精度要求。
2.3 带状地形
2.3.1 河道类型
为避免地质环境或工程建设诱发加剧地质环境问题,利用激光对景区河道进行扫描,后期进行数据处理,绘制地形图完成对河道的地质环境调查,判断地质灾害类型,为河道治理、景观设计提供依据。
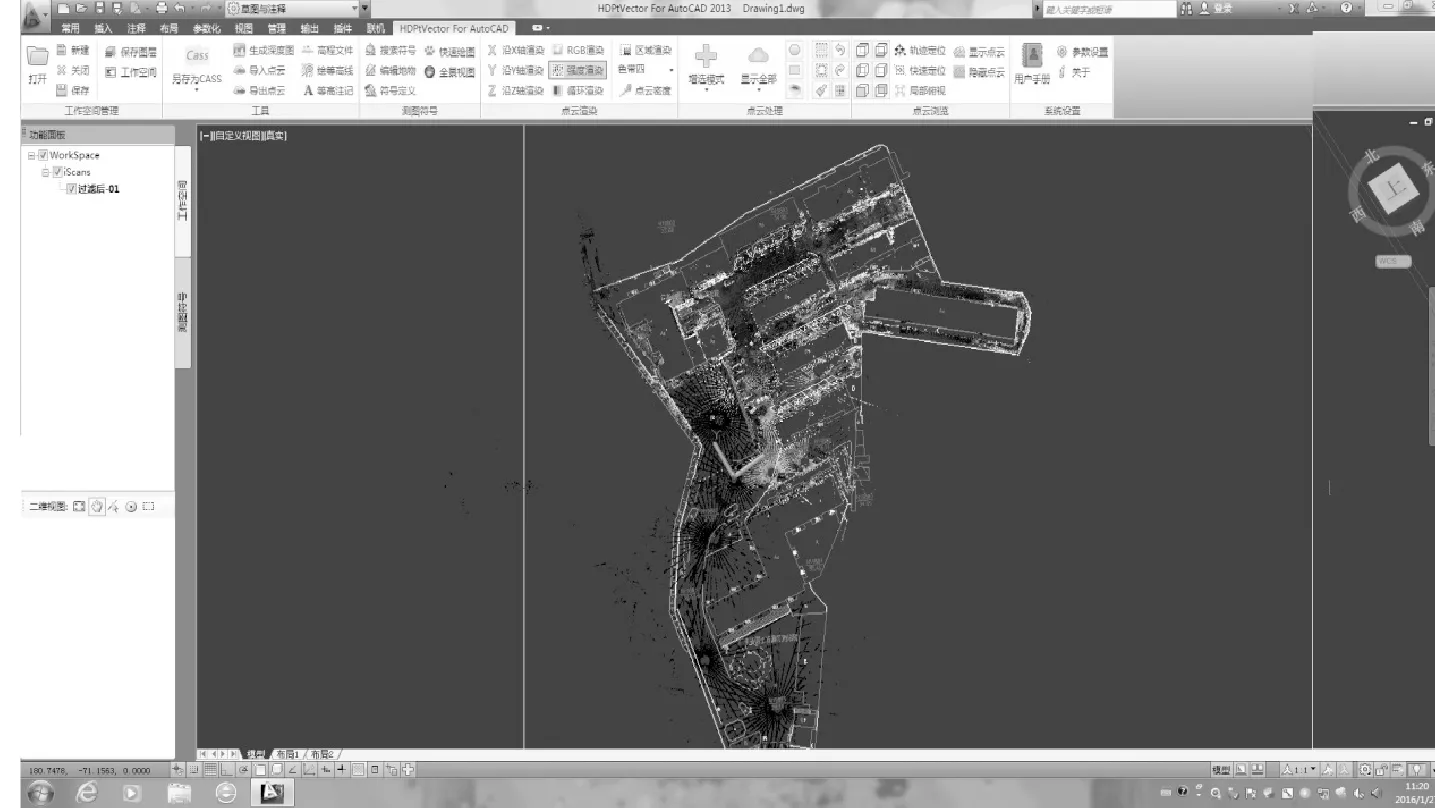
图8 在点云中绘制地1∶500形图(示例)
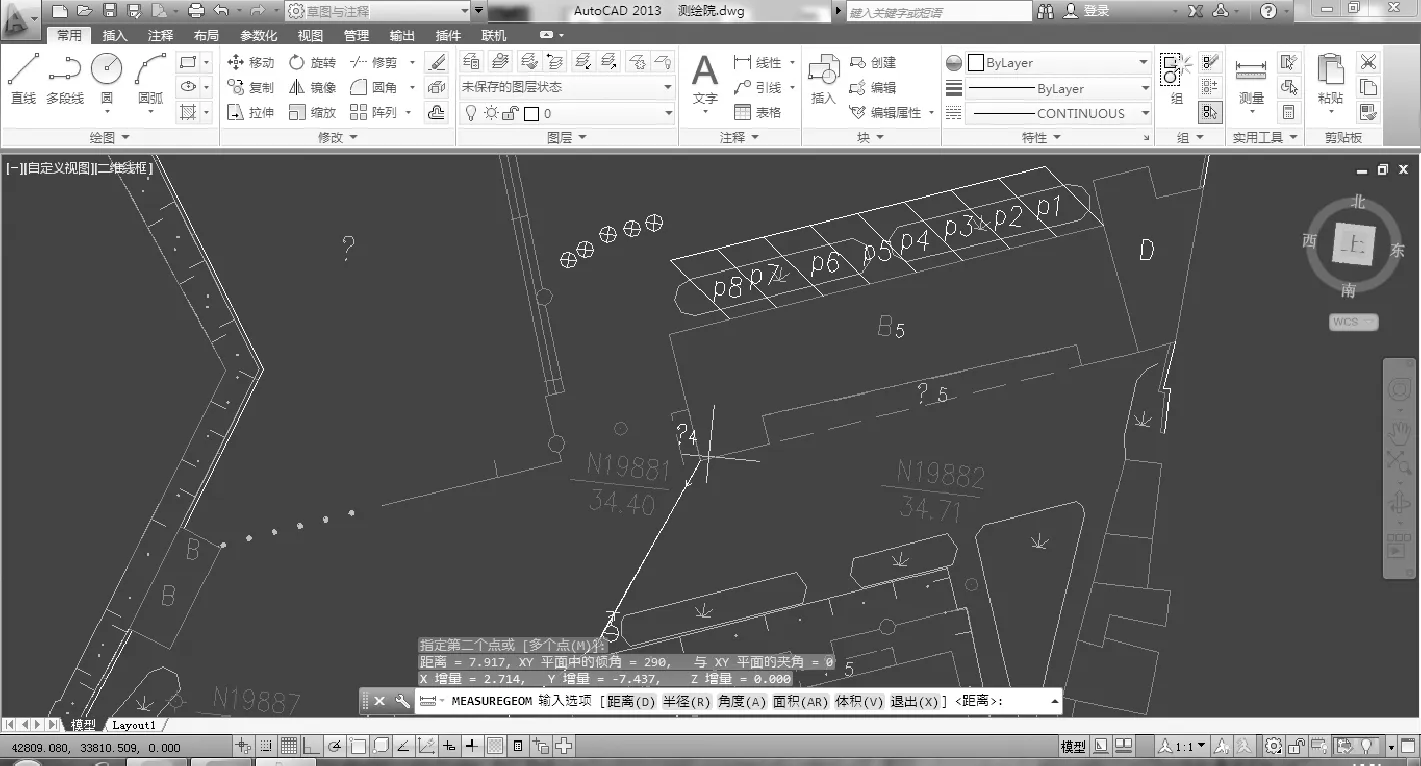
图9 在CAD中测距示意图(示例)
2.3.2 点云数据
点云数据如图10、图11所示。
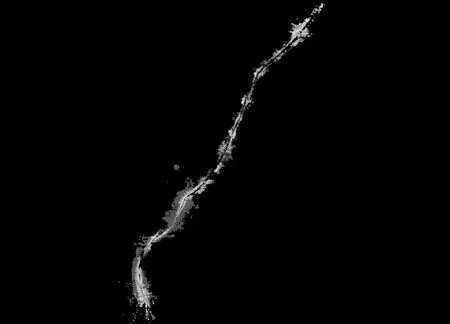
图11 河道整体点云数据
2.3.3 测图成果
获得点云数据后,通过后处理软件,设置等高距,自动生成等高线,并联动CAD软件,绘制并保存,如图12、图13所示。
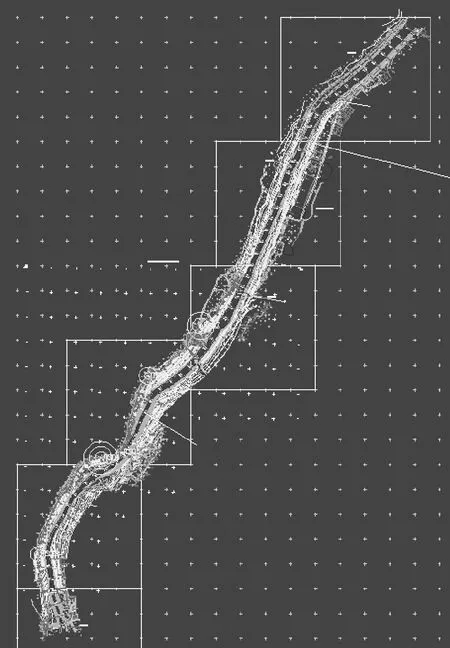
图12 河道整体等高线
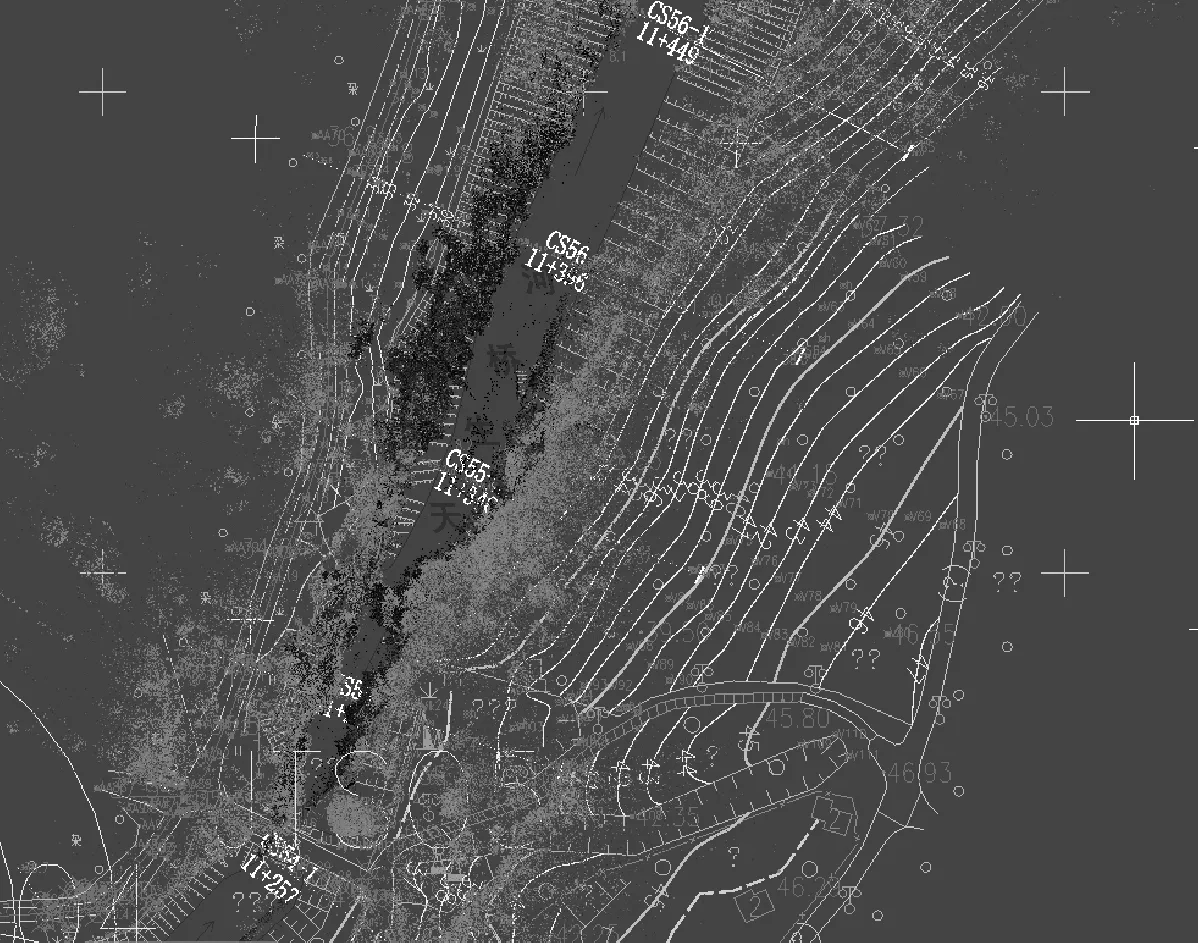
图13 河道局部等高线和点云
在软件中还可以绘制水位线,进行空间量测、软件实时联动显示到成图软件中,绘制完毕即可成图。
3 结 语
本文应用案例证实了地面三维激光扫描技术在大比例尺地形测绘中的应用,在测区面积较大时能够快速而精确地采集大量点云数据,有效节约人力物力,缩短工期,提高工作效率和经济效益;在复杂地形和危险测区,能够不直接接触危险目标,详细、快速地进行外业数据采集,既保证了人员和设备的安全,又保证了成图精度要求,并同时提高工作效率。
使用三维激光扫描仪,在山地丘陵区、城市地形测图、带状地形图都具有一定的优势和弊端。扫描技术在大比例尺地形测绘应用实践中,未来可以结合具体地形条件对以下问题进行优化:外业扫描前对测站和后视标靶的布局设计;内业点云数据的拼接和去噪可靠性;数据系统误差的来源和削减;数据质量的外符合评价。
猜你喜欢
西部交通科技(2021年9期)2021-01-11 12:55:36
广东教学报·教育综合(2019年87期)2019-09-10 07:22:44
测绘通报(2019年1期)2019-02-15 04:56:06
智能建筑与智慧城市(2018年11期)2018-11-28 09:04:14
测绘工程(2018年3期)2018-03-20 03:05:12
中国资源综合利用(2017年2期)2018-01-22 02:45:02
地理教育(2016年10期)2016-11-09 00:32:53
中国房地产业(2016年2期)2016-03-01 01:25:35
测绘学报(2015年4期)2015-01-14 03:01:28
地质找矿论丛(2014年3期)2014-02-27 09:31:52