
一种天气雷达天线指向自动检测技术
2019-01-07 07:37张建云张垚
张建云 张垚
(1 中国华云气象科技集团公司,北京 100081;2 北京敏视达雷达有限公司,北京 100094)
0 引言
新一代天气雷达在国内经过多年应用,在台风[1]、龙卷风[2]、输电线路山火[3]等重大天气的监控、预警以及防灾减灾方面发挥了巨大作用。天线指向准确性是天气雷达发挥效益的基础。目前大部分国内外业务天气雷达指向精度为0.1°,通过定期执行一种基于太阳为辐射源的扫描方法来检测天线指向误差。该方法将太阳作为辐射源,太阳位置作为绝对参考点用于检测天线实际指向精度(以下简称“太阳法”)。虽然太阳法得到了国内外的广泛认可,但存在两个限制条件:1)用太阳法检测天线指向精度时雷达停止正常的业务运行;2)为了保证检测的精度,太阳法仅在晴天且太阳高度角适度的条件下有效并且需要精确时间。就天线指向精度要求而言,Asko等[4]提出在俯仰方向上,天气雷达可接受的天线指向角度误差是0.1°;而在方位方向上,一个有着200 km范围精确探测的天气雷达天线指向误差小于0.3°就够了。总之,俯仰较方位方向上的天线指向误差对天气雷达系统影响大,尤其是对雷达低仰角扫描影响更为严重。如0.2°的天线指向误差在200 km处会产生大约700 m的位移。波束高度误差对降水估测产生较大影响[5];用于冰雹概率评估的回波高度计算[6]、地形束阻塞校正[7]等也与俯仰高度相关联。此外,天气雷达使用不精确的时间进行太阳法标定,会造成地物回波中包含云的回波和超折射回波现象[8]。
随着电子科学技术的迅猛发展,电子器件不断升级换代,先进的技术和器件使雷达探测技术得以提升、雷达稳定性和可靠性得到进一步改善。在国内外天气雷达应用领域,业务中的雷达均以太阳法作为天线指向的绝对检测方法,雷达系统内没有用于检测天线指向的在线自动相对检测方法。因此,天气雷达天线指向角度的系统误差即便已经超出允许范围,用户并不知情,且雷达系统仍然处于工作状态,但观测的雷达数据已不满足业务需求,有时会造成较为严重后果和影响。为了进一步提升天气雷达的数据质量和应用效益,对于7×24 h自动无人值守的业务天气雷达需要天气雷达系统具有自动在线检测天线指向精度的功能,用于在线检测雷达天线角度的误差是否超过允许的范畴。本文提出一种基于先进的激光探测器,通过在雷达系统内设置参考位置,自动实时在线检测雷达天线指向误差的方法。
1 天气雷达天线指向误差检测技术现状和探索
1.1 太阳法的应用和限制因素
太阳法是目前国际上多数天气雷达采用的主要天线指向检测方法,该方法以离线的方式应用于天气雷达日常的技术维护中,其主要特点是,可靠、精度高,但费时费力。理论上,将太阳视为一个可靠且全球可用的外大气层目标作为雷达天线指向检测的绝对参考。太阳法以雷达扫描太阳噪声功率作为理论基础,将太阳噪声轮廓(图像轮廓)等效为一个太阳光盘,光盘中心的噪声功率(或信噪比)值最大。实际应用中,使用太阳法时雷达发射机不发射功率,雷达以被动方式接收太阳能辐射能量。首先用雷达站点的经纬度和当前时间计算出理论的太阳位置,控制天线运动到理论的太阳位置。然后控制天线围绕太阳先后执行从左到右和从上到下的扫描,在扫描的同时程序记录下太阳对应的天线角度和太阳噪声功率值,从而获得峰值太阳噪声功率(或太阳图像宽度)的估计值。通过比较太阳噪声最大功率位置(或太阳图像中心位置)的天线角度和得到理论太阳位置角度修正值——水平方向扫描得到方位角度的修正值,垂直方向扫描得到俯仰角度的修正值。在算法实施过程中,也有采用丢弃在峰值太阳功率下3 dB或更大信噪比值数据,以缩小太阳功率轮廓尺寸的方式减小算法误差。
太阳法一般有两个要求:1)太阳处于低仰角8°~60°的位置,即限定上午或下午的某些时间段;2)执行太阳法的计算机系统时间至少要精确到1 s以内,以获得精确的太阳理论参照位置。Patricia等[9]发现该方法不易受到降水和非气象回波的影响,在方位和俯仰两个方向上均可实现0.05°~0.1°的精度;实际使用中还发现执行太阳法天线指向检测的时间对精度也有影响,譬如上午时段的测量误差较下午要小,且一般上午时段为下午时段实际应用误差的80%左右。例如,C波段天气雷达使用太阳法检测指向精度,上午约为0.05°,下午约为0.1°。
太阳法能够帮助雷达定北,实现雷达天线较高的角度定位精度,并且拥有不易受降水和非气象回波影响等诸多优势,使其得到广泛的应用。但由于该检测方法不能实时自动检测,因此国内外天气雷达的技术人员一直在探索在线检测方法。
1.2 地物在线天线指向检测方法
地物在线天线指向检测方法,是以雷达地物作为参考的检测方法。天气雷达完成安装架设调试后,地形较高的山地、建筑物等,其经纬度参数、高度参数和外形轮廓是相对固定的,雷达在低仰角扫描得到的地面杂波位置也是固定的。利用这一特征,使用高分辨率的数字地面高程模型(Digital elevation model,DEM)[10]数据和天气雷达地物杂波数据进行对比检查,通过判定方位角滞后量的方式得出天线指向在方位上的角度误差。基于地物检验天线指向的方法[11],可实现0.1°~0.3°的雷达方位角检测精度,但在雷达俯仰角度上检测能力较差。另外,该类算法是基于晴空和标准大气传播条件理论模型实现的技术,容易受到降水、大气异常传播的影响。因此,地物在线天线指向检测方法,在应用中仍然有众多局限性。
1.3 太阳回波在线天线指向检测方法
太阳回波在线天线指向检测方法,是以太阳信号功率理论模型为基础,其技术路线与太阳法类似。通过雷达扫描时自动检测反射率数据中来自太阳的辐射(太阳干扰),使用峰值太阳功率和太阳图像扫描宽度的估计值反演出太阳的方位角和俯仰角,用天线位置读数和太阳回波等效光盘中心之间位置的相对位移计算出方位角和仰角的天线指向偏差[12-14]。这种方法与太阳法的核心差异在于发射机是否发射电磁波,太阳干扰夹杂在雷达回波中。一般太阳干扰回波出现在日出或日落时分,雷达天线仰角处于0.6°~8°范围,而通常这些回波会被作为非气象回波而被质量控制算法滤除。该方法在一定程度上会受到降水和非气象回波的影响,大气异常传播也可导致太阳相对于天线的定位不准确。实际上,在业务天气雷达运行条件下接收到太阳辐射还是比较困难的,因此该太阳干扰法实用性有待提高。
2 基于激光探测器的天线指向检测方法
2.1 相对检测方法
基于激光探测器的天线指向检测方法是通过在雷达系统内设置角度参考,以对比预设参考位置与天线实际位置的差异来检测雷达天线指向偏差。用于设置角度参考的位置传感器是一种以激光为检测媒介的激光收发探测器。传感器选用单色准直较好收发一体的激光收发器,激光收发端几乎重叠可按同一点进行分析和处理。在雷达天线上固定一反射体,该反射体可实现来自90°以内任意角度的激光反射回归到接收端,实现发射出的激光原路返回,由此可判定反射体与激光在同一直线上。另外,该激光对金属、普通镜面等均不会产生有效反射,从而保障该反射体的有效性和唯一性。该方法还具有体积小、重量轻、功耗低、不干扰天气雷达等特点,且已获得知识产权[15]。
图1为激光探测器天线指向角度误差检测电路实现方案。在雷达天线罩内的天线扫描覆盖空间内精确牢固安装激光探测器,该位置在天线角度上的参考信息可准确获得且不变化,分别安装方位激光探测器和俯仰激光探测器。角度误差检测单元一边实时获取来自伺服控制系统的天线位置角码数据,一边获取来自方位和俯仰激光探测器的角度数据。然后将天线角码数据和该参考位置角度数据进行对比,从而计算出相对差值,当差值超过方位或俯仰角度误差允许范围时给出报警信号。报警信号发给雷达数据获取(Radar data acquisition,RDA)计算机,并由RDA计算机向用户发出请求维护信息,雷达维护人员应采用太阳法或地物在线等方法对雷达进行天线指向检测和标定。该激光探测角度检测误差,主要由天线扫描时转动到当前位置触发激光探测器的角度位置位移决定,精度可达0.05°。
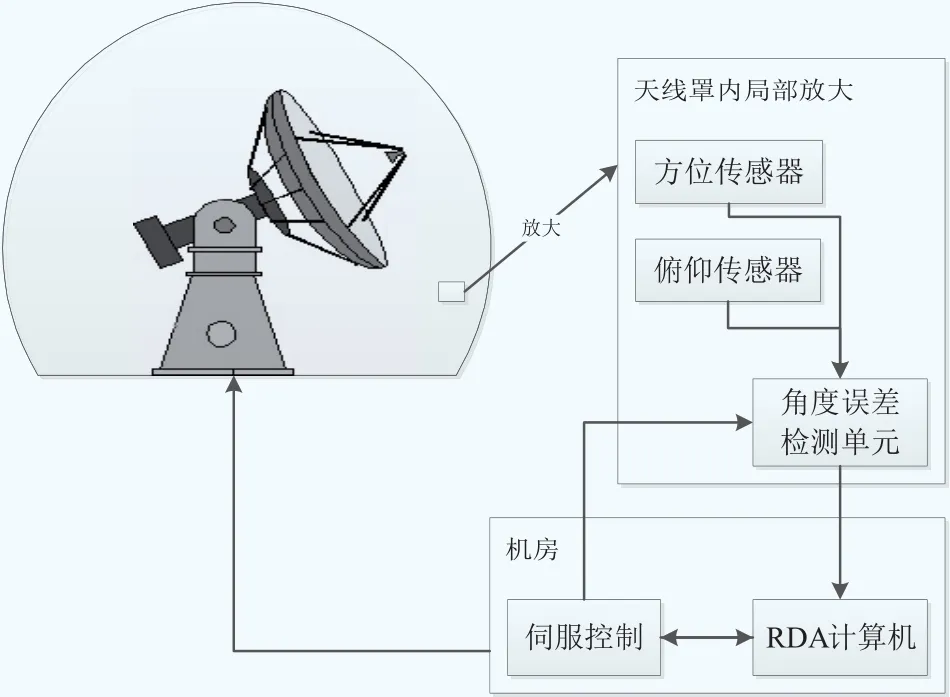
图1 天线指向误差探测原理框图Fig. 1 Block diagram of the detection system of antenna pointing errors
图2为方位角探测器误差检测示意图。在雷达运行扫描某一有效仰角上,选取方位角内某一固定位置,安装一激光探测器。当天线运行到此位置时,得到一个位置信号。与此同时,天线伺服控制系统也会获取到一个位置的角度信息。将两个角度信息进行对比,激光探测器的角度值是固定值,天线伺服控制系统测量到的角度是天线实际运行的角度位置值。当两者差值超过允许误差的时候,给雷达控制计算机发出报警信号,提示系统角度误差已经影响数据质量,需要维护雷达。
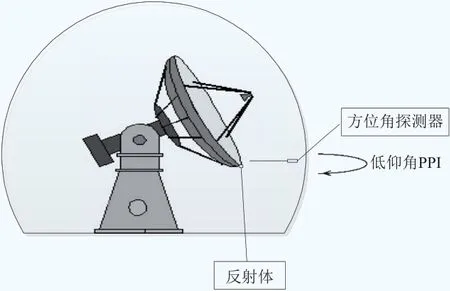
图2 天线罩内方位角探测器示意图Fig. 2 Diagram of azimuth error detector inside the radome
图3为俯仰角探测器误差检测示意图。由于俯仰方向上的天线指向误差对雷达系统产生的影响较方位方向上更大,该指向误差控制精度要求更高。如我国新一代天气雷达业务运行模式,天线在俯仰方向上通常处于0.5°~19.5°。如果只在角度范围边缘检测,那么俯仰角度误差的判定可以更加简单一些,也更加准确一些。工作扫描的最小仰角为0.5°,当天线在俯仰方向的指向误差超过±0.1°的允许范围时,天线的实际最小仰角要么高于0.6°,要么低于0.4°。基于上述情况,在0.4°和0.6°各设置一个激光探测器。正常情况下,雷达天线指向不在误差门限附近,此时天线在俯仰方向上是不能到达0.4°位置的。因此,如果0.4°位置处得到一个激光信号,说明天线的俯仰角度已经超出误差允许的下限。误差允许的上限为另一种情况,正常情况天线在每个扫描周期都会回到最低仰角0.5°位置,当然也会经过0.6°的位置。但是,如果超过误差运行上限时会使得天线不能回到0.6°的位置。那么只需要判断在一个扫描周期的时间内检测不到0.6°位置的激光探测信号,即可确定俯仰方向的角度已经偏离误差运行上限。

图3 天线罩内俯仰角探测器示意图Fig. 3 Diagram of elevation error detectors inside the radome
2.2 激光探测器检测方法技术原理
上述激光探测器角度检测误差与激光探测器在安装位置的模糊位移有关,就此对激光的模糊位移进行详细分析。表1为S,C,X三个波段天气雷达的天线罩参数和天线指向0.05°和0.1°误差在天线罩半径距离处的位移距离。以S波段天气雷达为例,对天线指向误差检验技术指标进行分析,计算天线指向误差对应激光反射允许的模糊位移。天线罩直径11.9 m,如在其半径位置安装激光探测器,则0.05°天线指向误差在天线罩半径的位移为5.19 mm,0.1°天线指向误差位移为10.38 mm。激光探测器在天线罩半径5.95 m处的可感知激光光斑尺寸约为表2中的13.91 mm,在进入反射体5.19 mm以内发出对准信号,即实现0.05°的检测误差。

表1 天线罩半径处的误差位移Table 1 Error displacements at the radius of the radome
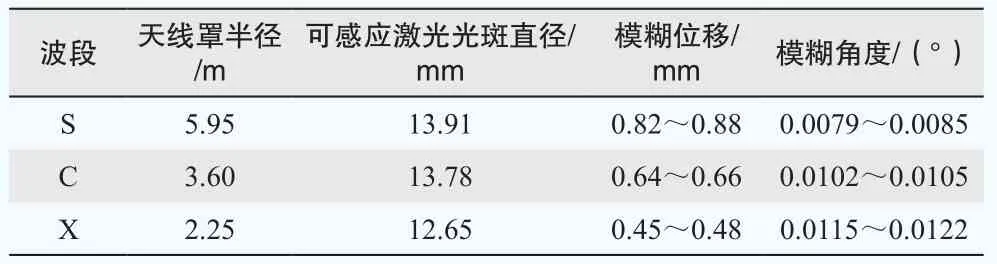
表2 探测器模糊位移测试Table 2 Fuzzy displacements of laser detectors

图4 激光运动模糊误差示意图Fig. 4 Diagram of the laser motion fuzzy error
激光光斑和反射体,一个固定,另一个运动,两者是相对运动的位置关系。假定激光按图4示意中由上向下运动时,以激光光斑的下边缘为探测起点,以进入反射体发生感知信号的纵向深度为探测灵敏度。在S波段天气雷达中,只要该深度值(模糊位移)小于5.19 mm就能保障0.05°的角度检测误差。
2.3 激光探测器检测方法测试评估
激光探测器检测能力测试评估方法具体如下:首先,分别固定激光探测器和反射体,其中反射体安装于可水平移动带有游标卡尺刻度的平台上;然后,微调反射体使其进入传感器发射的激光光斑面积区域,以进入光斑可触发激光传感器产生可感知信号的移动距离作为模糊位移;最后,反复测量,确定模糊位移并计算对应半径内的模糊角度。表2是根据不同频段天气雷达天线参数,在天线罩半径处测得的探测器模糊位移和角度数据。由此模糊角度数据可知,在俯仰方向上通过该探测器进行限位,可以实现0.05°以内角度误差检测。
只要探测器得到的位置角度数据与天线伺服得到的角码数据时间上一致,就能确保角度对比是有效的。国内CINRAD/SA、CA、X波段天气雷达的交流伺服控制系统采用14位量化360°角度码,最小分辨率为0.022°;直流伺服采用13位量化,电机控制精度0.044°。量化过程中小于1个有效位(Least significant bit,LSB)的角码按照一定的规则入位或舍弃,产生量化误差。该量化误差属于原理性误差,均小于0.05°。因此,伺服控制天线位置会产生小于0.05°的量化误差。目前天气雷达伺服控制角度传输间隔为45和11.25 ms两种模式,角度分辨率交流0.022°和直流0.044°。天线的角速度范围0°~36°/s,伺服控制系统的天线角码最小传输时间间隔为11.25 ms。因此只需在0.05°~0.1°误差角度范围内,同时得到天线角码数据和探测器位置角度数据,就可判定两者在方位角上的位置差值。经过计算,0.05°的角速度为4.44°/s,0.1°的角速度为8.89°/s。因此,在雷达体扫特定仰角(Plan position indicator,PPI)的扫描中,即可实现在方位上的对应天线指向误差的在线检测。同理可得在俯仰方向上也能实现天线指向误差的在线检测。
2.4 激光探测器检测示例
选取CINRAD/SA雷达为试验平台,该雷达使用交流伺服控制系统,14位量化角码,角码最小分辨率为0.022°。激光探测器安装在天线罩内,通过RHI和PPI扫描对上述探测方法进行实际检验。按图3示意图方式,激光探测器1安装在任意选取方位角(本次试验随机选取的方位角为10.8°)和俯仰角0.6°共同确定的位置;激光探测器2安装在俯仰角为0.4°且在方位上与探测器1相差1.8°的位置。探测器1用于检验方位角方向和俯仰角0.6°位置的指向偏差;探测器2仅用于检验俯仰角0.4°的指向偏差,对其具体方位角位置不关注。另外,探测器1和探测器2在方位上1.8°的间隔实测距离约为100 mm,用于防止两激光光斑的边缘重叠造成互相干扰。为了在试验中便于调节激光反射体位置,将激光反射体粘贴在天线旋转抛物面底部最低位置的边缘。在保持方位角不变的情况下通过RDA计算机设置并转动到天线俯仰角为0.6°的位置,然后人工推天线使激光反射体与激光探测器正对时,测得激光探测器1与激光反射体之间的距离约为3.25 m。经过RDA计算机RHI控制天线分别置于俯仰角0.4°和0.6°位置,测得激光反射体在两位置间垂直距离约为30 mm。而激光反射体的有效反射区域大小为14 mm×14 mm,该边长小于俯仰角0.4°和0.6°位置之间垂直距离,因此可以确保激光探测器1和2用于检测俯仰位置的有效性。
俯仰方向天线指向误差检测,试验第一步采用RHI控制使天线处于俯仰角0.6°位置,然后PPI扫描,实测每圈扫描激光探测器1有对正响应,激光探测器2无响应;试验第二步RHI使天线处于俯仰角0.4°位置,然后PPI扫描,实测每圈激光探测器1无响应,激光探测器2有对正响应。表明俯仰角0.4°和0.6°位置激光探测器已正常发挥作用。
CINRAD/SA雷达的体扫模式VCP21(Volume coverage pattern 21)在俯仰角6°以下低仰角扫描角速度介于11°~12°/s。因此试验中采用俯仰角固定在0.6°天线做角速度为12°/s和8.8°/s的PPI扫描,其中8.8°/s扫描作为对比参照。表3为天线固定在0.6°俯仰位置做角速度分别为8.8°和12°/s的PPI扫描测得的俯仰角实测值。理论上每圈扫描测得的俯仰角应保持为0.6°,但是由于角度的14位数字量化和±0.022°的最小测量精度的原因导致实测的俯仰角有0.57°和0.62°两个。另外,伺服角码精确到小数点后两位导致14位数字量化后±1位LSB的±0.022°量化误差会由小数点后第3位进位舍位造成0.02°~0.03°的测量模糊,但同一角度测量值的大小值之间的差值应不大于0.05°(0.022×2=0.044)。同理,方位角测量值也存在最大、最小值差值不超过0.05°的测量数据模糊。因此,PPI扫描每圈天线上激光反射体运行到激光器1位置时,如果得到的方位角数据最小、最大值之间差在0.05°以内,则表明测量值是有效合理的。

表3 PPI扫描俯仰角0.6°的实测值Table 3 Measured elevation angles at the elevation of 0.6° in PPI scanning
表4为角度误差检测单元在PPI扫描时,获取到的天线伺服角码数据和激光探测器的传感器与激光反射体对正时刻的时间测量参数。角度误差检测单元给获取到的每个伺服角码数据和激光探测器正对数据打印时间戳,时间戳的最小单位精确到0.06 μs,计数器量程为0~25.6 s,计数溢出后循环。由于正常PPI扫描时激光探测器对正时刻的数据一定是介于两个伺服角码数据之间,因此激光探测器正对时刻与获取到当前位置伺服角码两者的时间差极限值仅为几十毫秒。如果该时间差超过1 s,角度误差检测单元可以判定雷达处于非正常工作状态,此时角度检测报警无效。
表4记录了俯仰角固定在0.6°分别以不同角速度进行PPI扫描时,激光探测器与激光反射体对正时刻时间和邻近时刻的天线角码的获取时间。表中方位角表示激光反射体与激光探测器正对时刻获取的方位角角度值;方位角时间为获得该方位角的时间戳;激光传感器正对时间为激光反射体与激光探测器正对时刻的时间戳。激光探测器安装在10.8°,当天线运行到激光探测器位置时测得的方位角为10.81°和10.85°。本次测量先得到方位角位置信息,后得到激光探测器对正的时间,通过天线的角速度和时间差参数对方位角修正,修正后的方位角为激光探测器所在的方位角位置——表4中的修正方位角。在天线为12°/s角速度时,激光探测器的修正方位角位置分别为10.83°,10.85°和10.86°,最大、最小值差为0.03°;在天线为8.8°/s角速度时,激光探测器的修正方位角位置分别为10.83°和10.86°,最大、最小值差为0.03°。该最大最、小值差的0.03°与1个LSB进位后的量化误差一致,表明激光探测器位置测量非常准确。由于最初预设10.8°位置并没有精确到小数点后2位,因此可将表4中修正方位角的平均值10.85°作为参考点,一旦雷达配置VCP在0.6°低仰角扫描时出现超过±0.05°偏差的数据(10.79°和10.91°),则表明天线的方位指向偏差较大,并RDA计算机向用户请求太阳法标定。
3 小结
激光探测器天线角度检测方法,不受自然界的干扰和影响。其方法实现简洁明了、较为可靠,有较好的业务实用性。经过在CINRAD/SA雷达上实测检验,激光探测器不仅在天线俯仰方向上对指向超限限定位置检测响应较为灵敏,而且对天线的方位角可以实现0.05°以内精度的位置定位,位置检测较为准确。该方法可适用于CINRAD/SA、CA等多个带有天线罩的业务天气雷达型号,在体扫中自动实时监控天线方位和俯仰方向上同时实现0.1°以内的天线指向精度检测,解决了现有业务雷达不能在线检测指向偏差的问题。

表4 PPI扫描时方位角与激光探测器的测量参数Table 4 Parameters of azimuth angle and laser detector in PPI scanning
猜你喜欢
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
小学科学(2020年1期)2020-02-18
百科探秘·航空航天(2020年12期)2020-01-22
福建基础教育研究(2019年6期)2019-05-28
小学科学(2019年12期)2019-01-06
现代计算机(2018年19期)2018-08-01
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
科技创新与应用(2016年9期)2016-05-14
中国科技纵横(2014年15期)2014-12-11
太空探索(2014年9期)2014-07-10
 Advances in Meteorological Science and Technology2018年6期
Advances in Meteorological Science and Technology2018年6期
- Advances in Meteorological Science and Technology的其它文章
- 鄂中区域大雾天气中地基GPS监测的水汽总量及其演变分析
- 第三次“台站巡礼”策划研讨活动成功举办
- 江苏一次灾害性大风天气过程分析
- 榜单
- LMF雷电监测预警系统简介
- 上海佘山国家旅游度假区气象环境条件分析