基于鼹鼠多趾结构特征的仿生切土刀片设计与试验
2019-01-05 07:43杨玉婉马云海蒋啸虎李金光
农业机械学报 2018年12期
杨玉婉 佟 金 马云海 李 默 蒋啸虎 李金光
(1.吉林大学工程仿生教育部重点实验室, 长春 130025; 2.吉林大学生物与农业工程学院, 长春 130025)
0 引言
土壤耕作中,水平阻力是评价农具耕作性能的重要指标之一[1]。基于摩尔-库伦力学理论建立了简单耕作部件切土力学模型[2-5]。而且按简单基本耕作部件工作深度与宽度的比值划分为3种类型,即:宽刀(耕深/耕宽比值小于0.5)、窄齿(耕深/耕宽比值大于1且小于6)、极窄齿(耕深/耕宽比值大于6)。GODWIN[6]研究了水平阻力与耕深/耕宽比值的关系,发现对于极窄齿水平阻力随耕宽的增加呈正比例增大;对于窄齿水平阻力随着耕宽的增加而增大,但增长率逐渐减小;宽齿的水平阻力随着耕宽的增加而缓慢地线性增加。可以看出,农具的几何结构影响着水平阻力的变化。
相关研究表明农作物生产过程中约有一半的能量用于土壤耕作[7]。如此高的能耗是由于农具在耕作中承受着极高的水平阻力,为了降低水平阻力,设计了许多新型农具结构。设计不同弧度的切土刀片[8],通过有限元法仿真试验发现,切土刀片弧度越大,在土壤中移动所受阻力越小;仿生非光滑切土刀片[9-10]是基于土壤挖掘动物的非光滑表面结构特征而设计的,试验表明,该仿生非光滑刀片具有减粘降阻的效果。基于鼹鼠爪趾结构特征的仿生旋耕-破茬刀片[11]具有较好的切土和破茬效果。对于农业耕作部件,减小土壤阻力的方式有很多,如电渗减阻、振动降阻、电磁降阻和仿生降阻[12-15]。
鼹鼠的每个手掌都有5个宽大而锋利的爪趾。当鼹鼠挖掘土壤时,5个爪趾张开并处于同一平面协同工作,从而实现高效切土,这种结构被称为多趾组合结构。这种多趾组合结构具有独特而高效的切土性能,可用于设计新型的耕作部件,以实现减阻降耗的耕作目的。本文基于鼹鼠多趾组合结构,设计具有仿生结构特征的切土刀片,通过土槽试验研究该多趾组合特征结构对水平切土阻力的影响。
1 鼹鼠多趾组合结构特征分析
鼹鼠及放大7.5倍的前肢手掌五趾组合结构如图1所示。每个爪趾尺寸和相邻爪趾间间距是多趾组合特征结构的重要参数,趾长L是指爪趾的纵向长度;由于爪趾在水平方向上尺寸差异较小,因而选择爪趾中间位置作为趾宽W;相邻趾间间距Δx,是相邻两爪趾中心线间的横向距离。鼹鼠多趾组合结构特征几何参数如表1所示。
为了便于分析鼹鼠前肢手掌多趾组合结构特征,定义两个比值
(1)
(2)
式中m——趾长与趾宽的比值
n——相邻爪趾间间距与趾宽的比值
鼹鼠前肢手掌多趾组合结构可表示为
(3)
式中w0——鼹鼠前肢手掌的宽度,mm
Li——趾长,mm,i=1,2,3,4,5
mi——趾长与趾宽比值
npq——相邻爪趾间间距与趾宽的比值
由表1(其中q=p+1;p=1,2,3,4)可知,m值范围为2.63~3.41,n值范围为1.12~1.60,由于鼹鼠挖掘过程中趾间距因实际情况而调整,因此n取值不固定,变化范围较大。由此可知,鼹鼠前肢手掌多趾组合结构是一种多窄齿组合结构,且相邻齿间间距可调整。

图1 鼹鼠及其多趾组合结构Fig.1 Mole rat and its multi-claw combination structure
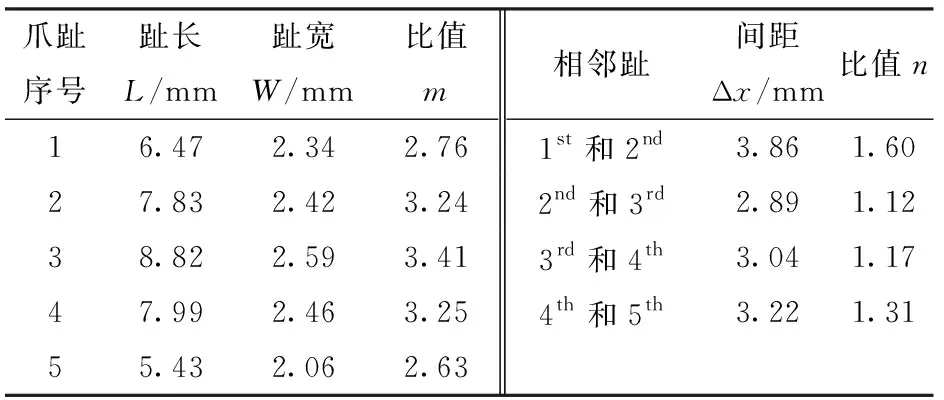
爪趾序号趾长L/mm趾宽W/mm比值m相邻趾间距Δx/mm比值n16.472.342.761st和2nd3.861.6027.832.423.242nd和3rd2.891.1238.822.593.413rd和4th3.041.1747.992.463.254th和5th3.221.3155.432.062.63
2 仿生切土刀片设计
根据窄齿耕深与耕宽的比值大于1且小于6,确定趾长与趾宽比值m的设计范围为1~6;根据GODWIN等[16-17]对多窄齿排列对土壤阻力和扰动的研究可知,多窄齿组合切土是通过多窄齿间的共同作用使得土壤破裂,齿间距是该共同作用中的重要参数,取值范围为1~2,因而确定相邻趾间横向间距与趾宽比值n的设计范围为1~2。本文基本型切土刀片尺寸为80 mm×50 mm×10 mm,双刃口,刃口角α均为15°,如图2a所示。基于鼹鼠前肢手掌多趾组合结构特征,以m和n作为仿生结构元素,根据多趾组合结构(式3)设计具有仿生多趾组合结构特征的切土刀片。为简化设计,仿生切土刀片中每个窄齿的m值和相邻齿间间距n值均相等,每个齿长L11均为35 mm,如图2b所示。仿生切土刀片结构可根据方程式(3)简化为
(4)
式中w1——切土刀片的宽度,mm
L11——窄齿长度,mm
N——窄齿个数

图2 切土刀片Fig.2 Soil-cutting blade1.刀柄 2.刀体

图3 土槽测试系统Fig.3 Soil bin test unit1.刀片 2.角度调节板 3.计算机 4.电机 5.丝杠滑板系统 6.拉力传感器
3 土槽试验
3.1 试验设备与试验方法
试验在吉林大学仿生教育部重点实验室的小型土槽内完成。土槽箱1 000 mm(长)×420 mm(宽)×400 mm(深)为试验提供一个可重复的土壤条件,土壤为沙壤土(46%砂土、33%壤土和21%粘土),是一种典型的东北耕地土壤。在土槽箱内,土壤层尺寸为1 000 mm(长)×420 mm(宽)×260 mm(深)。刀片材料为45钢,刃口通过打磨处理。
土槽测试系统由运动控制装置、角度控制装置和数据采集装置组成,如图3所示。运动控制装置由伺服电机(三相,200 W)、滑轮运动副和滑动板组成,用于带动刀片在土壤中水平移动。角度控制装置可调节刀片在倾角0°~90°范围内工作,由角度调节板来实现。数据采集装置由拉力传感器和计算机组成,通过数据采集器和数据接口将计算机与伺服电机、拉力传感器相连,用VB软件编写程序,软件主要可以控制电机转速和转向,进而控制触土部件的运动速度和方向,通过数据采集器接收力传感器采集的信息,可以得到部件的运动位移与拉力,进而控制系统。
在土槽试验中,刀片在3种不同土壤含水率和3种不同切土倾角下进行切土,其中土壤含水率分别为10%、20%和30%,切土倾角分别为30°、50°和70°。耕深和前进速度分别保持在35 mm和500 mm/min。每组试验重复3次,取平均值作为结果。为保证试验的可重复性,每次试验后都需人工翻土处理,并将土壤刮平和压实,用SC-900型坚实度仪测量坚实度,用TDR-300型水分仪测量土壤含水率,保证每次试验前的土壤硬度和土壤含水率的误差均在10%以内。
3.2 试验方案
通过正交试验的方法,分析仿生结构元素对水平阻力的影响。试验选择了影响切土阻力的4个因素:土壤含水率、切土倾角、仿生结构元素m和n,试验指标为水平阻力。每个试验因素各取3水平,在Design-Expert 8.0.6软件中,基于Box-Behnken[18]设计原理,通过二次正交回归试验方法分析仿生刀片的切削能力。试验因素编码如表2所示。
4 试验结果与分析
试验方案为四因素三水平试验,试验结果如表3所示,x1、x2、x3、x4为因素编码值。水平阻力反映了仿生刀片的切土性能,阻力越小,切土性能越好,反之,切土性能越差。表3中,最小的切土阻力为15.41 N,相应地m=3.5、n=1.50、土壤含水率为10%和切土倾角为30°。

表2 因素编码Tab.2 Coding of factors

表3 试验方案和试验结果Tab.3 Test scheme and results of coded test


(5)
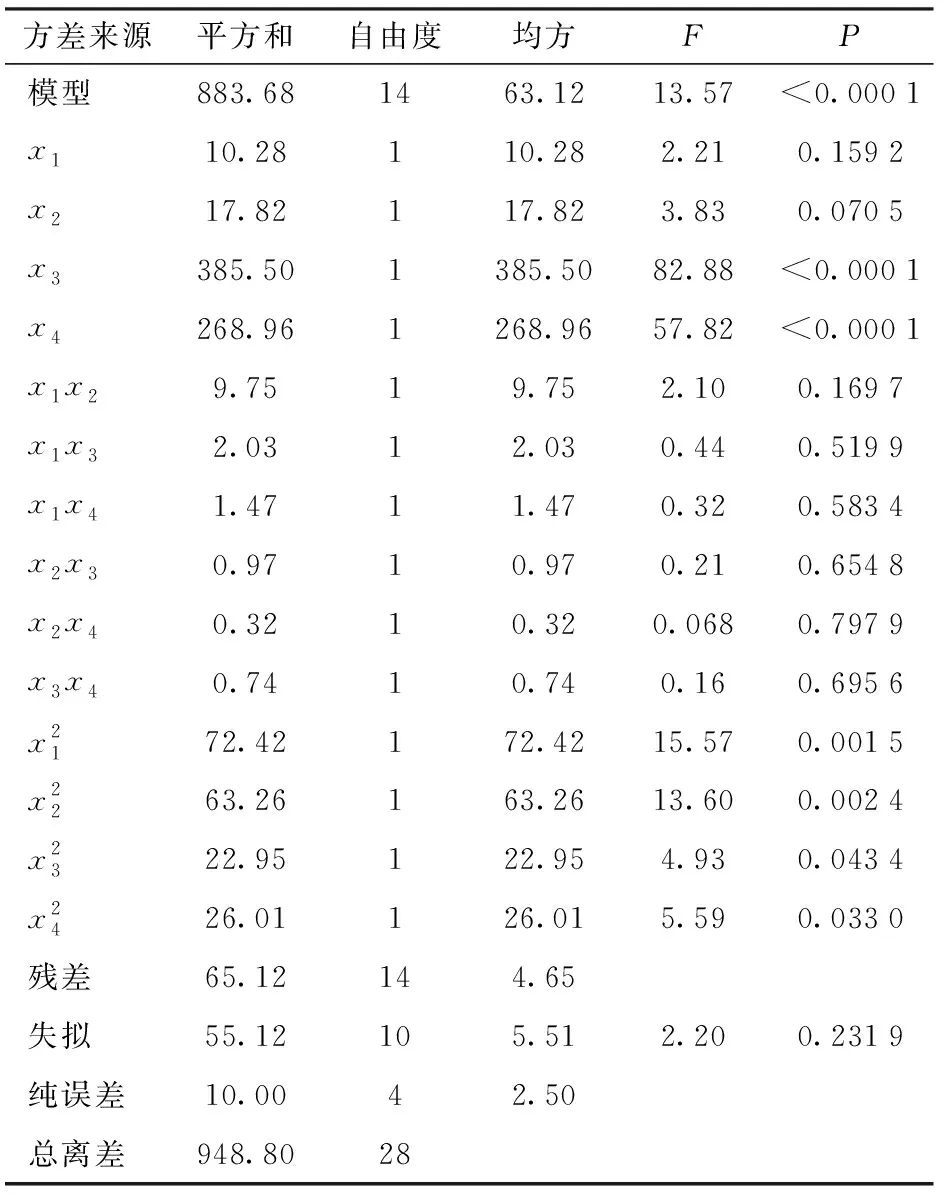
表4 试验结果的方差分析Tab.4 Variance analysis of draught forces
应用响应曲面法分析4种影响因素(土壤含水率、切土倾角、仿生结构元素m和n)及其交互作用对水平阻力的影响,如图4所示。在分析过程中,设置其中的2个影响因素为0水平,然后讨论其余2个因素对水平阻力的影响。
(1)仿生结构元素m和n对水平阻力的影响
仿生结构元素m和n对水平阻力的影响可表示为

(6)
如图4a所示,水平阻力随着变量x1和x2从水平-1变化到水平0均增大,而随着变量x1和x2从水平0变化到水平1均减小,因此在(x1,x2)=(0,0)位置处,水平阻力达到最大值28.57 N,并由方程式(6)可知,水平阻力在(x1,x2) =(1,1)位置处达到最小值18.40 N。相对于变量x1来说,变量x2对水平阻力的影响显著。
(2)土壤含水率和切土倾角对水平阻力的影响
土壤含水率和切土倾角对水平阻力的影响可表示为

(7)
如图4b所示,水平阻力随着变量x3从水平-1变化到水平0时变化不大,从水平0变化到水平1时迅猛增加;水平阻力随着变量x4从水平-1变化到水平0时增加较快,从水平0变化到水平1时增加较慢。因此水平阻力在(x3,x4)=(-1,-1) 位置处达到最小值。变量x3和x4对水平阻力的影响都显著。

图4 各个因素对水平阻力影响的响应曲面Fig.4 Response surface of effects of factors on draught force
(3)土壤含水率和仿生结构元素m对水平阻力的影响
土壤含水率和仿生结构元素m对水平阻力的影响可表示为

(8)
如图4c所示,水平阻力随着变量x1从水平-1变化到水平0均增加,而随着变量x1从水平0变化到水平1降低;水平阻力随着变量x3从水平-1变化到水平1均增加。变量x3对水平阻力的影响显著。相对于变量x3来说,变量x1对水平阻力的影响不显著。
(4)土壤含水率和仿生结构元素n对水平阻力的影响
土壤含水率和仿生结构元素n对水平阻力的影响可表示为

(9)
如图4d所示,水平阻力随着变量x2从水平-1变化到水平0均增加,而随着变量x1从水平0变化到水平1降低;水平阻力随着变量x3从水平-1变化到水平1均增加。变量x3对水平阻力的影响显著。相对于变量x3来说,变量x2对水平阻力的影响不显著。
(5)切土倾角和仿生结构元素m对水平阻力的影响
切土倾角和仿生结构元素m对水平阻力的影响可表示为

(10)
如图4e所示,水平阻力随着变量x1从水平-1变化到水平0均增加,而随着变量x1从水平0变化到水平1降低;水平阻力随着变量x4从水平-1变化到水平1均增加。变量x4对水平阻力的影响显著。相对于变量x4来说,变量x1对水平阻力的影响不显著。
(6)切土倾角和仿生结构元素n对水平阻力的影响
切土倾角和仿生结构元素n对水平阻力的影响可表示为

(11)
如图4f所示,水平阻力随着变量x2从水平-1变化到水平0均增加,而随着变量x2从水平0变化到水平1降低;水平阻力随着变量x4从水平-1变化到水平1均增加。变量x4对水平阻力的影响显著。相对于变量x4来说,变量x2对水平阻力的影响不显著。
5 对比试验结果与分析
传统刀片和优化仿生刀片(m=5,n=1.75)在不同切土倾角和土壤含水率下切削土壤时,测量并记录各自的水平阻力,如图5所示。当切土倾角逐渐增加时,水平阻力先减小后增加,这意味着刀片在临界倾角时会有最小水平阻力。对于传统刀片来说,当土壤含水率为10%和20%时,临界倾角约为30°;当土壤含水率为30%时,临界倾角在40°~50°范围内。对于仿生刀片,也有同样的现象。这说明仿生结构元素不改变刀片切土时的临界倾角,然而土壤含水率对其有明显影响。

图5 不同切土倾角和土壤含水率下传统刀片和仿生刀片的水平阻力Fig.5 Draught forces of conventional and bionic blades at different rake angles and soil moisture contents
对于传统刀片来说,当土壤含水率从10%增大到20%时,水平阻力没有明显变化,这与GHOSH[19]研究旋耕刀在土壤含水率为10%~28%范围内切土时,扭矩没有明显变化的现象类似;当土壤含水率为30%时,水平阻力明显增大。水平阻力的变化与土壤机械性能具有着较大关系,根据STAFFORD[20]研究,土壤内聚力是引起水平阻力变化的主要因素,而其他土壤机械性能参数对水平阻力的影响不明显。通过三轴试验得到,当土壤含水率从10%增大到20%时,土壤内聚力从2.26 kPa增加到2.35 kPa;当土壤含水率为30%时,土壤内聚力为3.68 kPa。可以看出,土壤内聚力在土壤含水率为10%和20%时变化不大,而土壤含水率增大为30%时其值迅速增加,这说明了水平阻力的变化与土壤内聚力具有极大的关系,也暗示了农业耕作部件在合适的土壤含水率下耕作会有较小的耕作阻力,在本文土壤条件下,土壤含水率在10%~20%范围内时比较适合耕作。
仿生几何结构对刀片所受的水平阻力有显著影响。在相同的土壤含水率下,仿生刀片的水平阻力总小于传统刀片的水平阻力。当土壤含水率为10%、20%和30%时,仿生刀片的水平阻力分别减小11.48%~39.16%、17.81%~28.00%和11.19%~33.26%。可以看出,仿生刀片具有较好的切土性能。
6 结论
(1)对鼹鼠前肢手掌多趾组合结构特征进行分析,得到鼹鼠前肢手掌多趾组合结构是一种多窄齿组合结构,且相邻齿间间距可调整。定义趾长与趾宽的比值为m、相邻趾间距与趾宽的比值为n,并确定了鼹鼠多趾组合结构的数学模型。
(2)根据鼹鼠多趾组合结构的数学模型,以及仿生结构元素m的设计范围为1~6和n的设计范围为1~2,设计出了具有仿生结构特征的切土刀片。
(3)基于Box-Behnken设计原理,分析了土壤含水率、切土倾角、仿生结构元素m和n对刀片水平阻力的影响,得到了二次多项式方程来预测水平阻力的变化,且土壤含水率和切土倾角对水平阻力的影响更加显著。通过响应曲面法得到优化的仿生结构为m=5、n=1.75。
(4)比较了传统和仿生切土刀片在不同切土倾角和土壤含水率的水平阻力,得到仿生结构元素不改变刀片切土时的临界倾角,然而土壤含水率对其有明显影响;仿生刀片具有较好的切土性能,在相同的土壤含水率下,仿生刀片的水平阻力总小于传统刀片的水平阻力,且在土壤含水率为10%~20%时会更适合切土,水平阻力可达到较小值。
猜你喜欢
科学与财富(2022年3期)2022-06-01
娃娃乐园·综合智能(2022年2期)2022-04-19
保鲜与加工(2022年3期)2022-03-21
科学大众(2021年19期)2021-10-14
北京汽车(2021年3期)2021-07-17
科学大众·小诺贝尔(2021年10期)2021-01-22
湖北农机化(2020年21期)2021-01-11
少年科学(2015年7期)2015-08-13
航天器工程(2014年5期)2014-03-11
祝您健康(1985年6期)1985-12-30