
无人机单镜头倾斜摄影测量及三维建模技术方法研究
2019-01-02 09:01余章蓉,范鸿润,朱景辉,罗济彬,郭乾政
软件 2019年12期
余章蓉,范鸿润,朱景辉,罗济彬,郭乾政


摘 要: 无人机倾斜摄影测量技术以其高效、高精度等优势得到了快速发展。本文以具体项目为例,研究了无人机倾斜摄影测量外业测量工作的仪器设备、作业流程及相关的施测方法,并对外业数据进行处理获得三维模型的过程及达到的精度进行分析。实验证明,利用无人机倾斜摄影测量及三维建模,可快速获得测区的三维数据模型及地形数据等。
关键词: 无人机;倾斜摄影测量;三维建模
中图分类号: P231 文献标识码: A DOI:10.3969/j.issn.1003-6970.2019.12.012
本文著录格式:余章蓉,范鸿润,朱景辉,等. 无人机单镜头倾斜摄影测量及三维建模技术方法研究[J]. 软件,2019,40(12):5155
Research on UAV Single Lens Tilt Photogrammetry and 3D Modeling Technology
YU Zhang-rong, FAN Hong-run, ZHU Jing-hui, LUO Ji-bin, GUO Qian-zheng
(KunMing University of Science and Technology Oxbridge College)
【Abstract】: The measurement technology of the unmanned aerial vehicle (UAVs) has been developed rapidly with its high efficiency and high precision. Taking a specific project as an example, this paper studies the instrument and equipment, the operation process and the related application method of the measurement of the external industry of the unmanned aerial vehicle, and analyses the process of obtaining the three-dimensional model by processing the data of the external industry and the accuracy of the obtained three-dimensional model. The experimental results show that the three-dimensional data model and the terrain data of the measurement area can be obtained quickly by using the oblique photogrammetry and three-dimensional modeling of the unmanned aerial vehicle.
【Key words】: Unmanned aerial vehicle; Tilt photogrammetry; 3D modeling
0 引言
無人机倾斜摄影测量技术,打破了传统航测遥感影像只能垂直拍摄的限制,能从不同角度对地面数据进行采集,高效的获取数据,对地面情况进行真实可靠的反映,满足人们对地面三维信息的需要。目前,无人机倾斜摄影测量技术已开始在生产实践过程中应用,倾斜影像构建的三维模型已广泛应用于城市规划、公共安全、通信、军事等众多领域[1-2]。无人机倾斜摄影测量新技术将使测绘行业的作业方式、生产效率及产品使用等产生巨大的改变。
传统的地图可视化多采用二维形式,对测量区域的地面点的平面位置有较好的反映。而倾斜摄影测量技术,从多方位、多角度采集地面影像,可以从影像中确定空间地物的位置,还能获得建构筑物的建筑结构、色彩、纹理等。通过影像可建立实景三维数据模型,使用户能很直观的从三维模型上判读地面情况,同时地物纹理更丰富、效果更逼真。三维地理信息系统比二维地图更能全面、直观、真实地反映地物和地形的形状、纹理和环境信息,从而实现从空中到地面再到地下的数据一体化,是地理信息产品升级的重要发展方向[3]。
本文以具体项目为例,研究了无人机倾斜摄影测量外业测量工作的仪器设备、作业流程及相关的施测方法,并对外业数据进行处理获得三维模型的过程及达到的精度进行分析。
1 研究项目概况及软硬件情况
1.1 项目概况
实验项目对昆明理工大学津桥学院高新校区进行三维可视化研究,采用的建设步骤为先进行无人机倾斜摄影测量,然后利用Smart3D软件进行建模,生成三维模型。
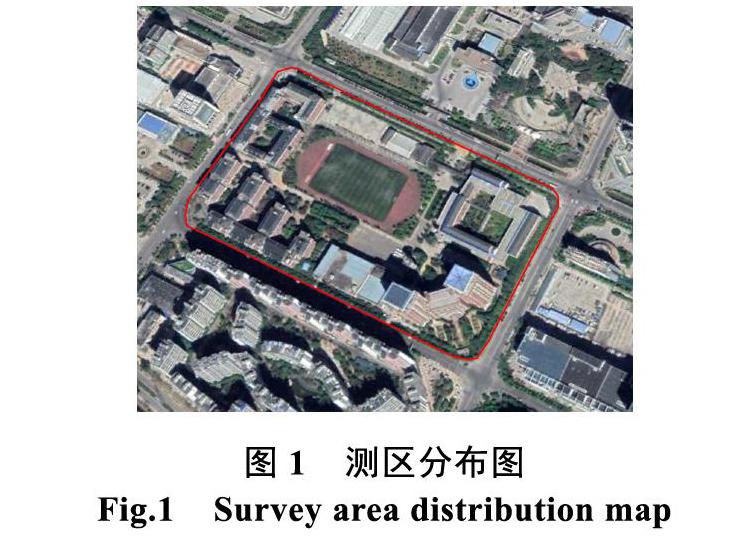
本次测区位于昆明高新区,中央子午线经度102°,纬度25°。地块工整、地势平坦,地块整体呈西偏北约25°方向,东西向长约400米,南北向宽
图1 测区分布图
Fig.1 Survey area distribution map
约250米。地块周边均为城市市政道路。地块内最高建筑为西南角的双子楼,高度约70米。地块东南方向约90米处有高100米建筑,西南方向约120米处有高100米建筑,周边其他建筑均为低层及多层建筑。
1.2 软硬件情况
倾斜摄影测量多采用旋翼或固定翼无人机搭载五镜头相机进行[3-5]。本项目位于城市建成区域,周边建筑密集,且是学校,考虑到搭载五镜头的无人机一般机型及噪音较大,且飞行费用昂贵,从降低飞行难度、减小对周边环境的影响及降低费用出发,外业摄影测量采用大疆Mavic Pro2四旋翼无人机+Hasselblad能够调整姿态的单镜头相机为硬件,搭载GPS卫星定位系统及IMU传感器。单镜头相机与常用的五镜头相机相比,具有飞行器小、操作简单,噪音小等优势,在数据精度上较五镜头相机相对低,但实验证明,通过布设井字形的多条航线及提高航向及旁向重叠度等,最终成果可达到国家相关规范所要求的精度。
内业三维建模采用Smart 3D软件,它是基于图形运算单元GPU的快速三维场景运算软件,无需人工干预,可从简单连续的影像中生成最逼真的实景真三维精细模型[6]。
表1 大疆Mavic Pro2无人机技术参数
Tab.1 Technical Parameters of Mavic Pro2 Unmanned Aerial Vehicle in Dajiang
型号 飞行时间 最大续航
里程 最大上升
速度 最大下降
速度 最大水平
飞行速度 最大可
倾斜角 最大飞行
海拔高度 最大可
承受风速
飞行器 Mavic Pro2 21分钟 10 km 4 m/s 3 m/s 10 m/s 35° 5000 m 5级风
型号 像素 镜头视角 镜头焦距 光圈 对焦点 照片最大分辨率 图片格式 支持文件系统
相机 Hasselblad 1200万像素 85° 24 mm f/2.8 0.5 m至无穷远 4056×3040 JPG/DNG FAT312
图2 大疆Mavic Pro2无人机
Fig.2 Dajiang mavic pro2 UAV
2 具体的实施过程
2.1 倾斜摄影测量
利用无人机进行外业的倾斜摄影测量,其主要步骤为:
(1)摄影测量方案设计。
对进行倾斜摄影测量的区域进行现场踏勘,了解现场情况,根据现场情况选择航摄时间,设计航摄路线等[7-9]。
(2)航摄技术参数设定。
地块建筑主要为多层建筑,高度适中,且建筑密度不高,地块东南方向约90米处有高100米建筑,西南方向约120米处有高100米建筑,周边其他建筑均为低层及多层建筑。测量比例尺定为1∶500。为提高精度并满足空域安全要求,飞行高度设置为130米。倾斜摄影测量航线采用专业软件设计,航带布设平行于东西向及南北向,航线数共29条,其中东西向17条,南北向12条,交叉飞行,航线间距30 m,拍照间距20 m。飞机飞行速度设置为10米/秒。為提高航摄精度,航向重叠度和旁向重叠度均设置为85%。
另进行了正射影像测量,航线沿东西向布设13条,航向重叠度及旁向重叠度均设置为80%。航线间距33 m,拍照间距22 m。飞机飞行速度设置为10米/秒。
倾斜影像及正射影像均用于三维建模。
(3)倾斜摄影测量。硬件设备条件允许情况下可搭载POS直接获取像片中心点坐标,较少像控点数量。飞行时间定在下午2点半开始,起飞点位于地块中心,即学校的足球场,场地开阔,便于操作及视线良好。
(4)像控测量。选择分布合理的像片控制点。为提高像控测量的效率和精度,采用GNSS RTK技术进行像控点测量。根据研究区域的范围及地理特征,布设了8个控制点,其主要分布于测区内部及周边比较明显的特征点上。采用GNSS RTK技术测量像控点坐标时,利用昆明市连续运行GPS参考站系统,即采用CORS的方式进行GNSS RTK测量,直接获取控制点的CGCS2000坐标成果。
图3 倾斜摄影测量航线布设图
Fig.3 Layout of inclined photogrammetry route
图4 正摄航线布设图
Fig.4 Forward route layout
图5 外业测量
Fig.5 Field survey
图6 像控点测量
Fig.6 Image control point measurement
2.2 利用Smart3D进行三维建模
与传统的手工建模相比,Smart3D建模具有周期短、效率高、费用低、模型效果更真实等特点[9-10]。在外业获取影像数据后,运用Smart3D软件进行三维建模。采用Smart 3D软件进行实体三维建模。建模过程首先建立工程文件,然后倒入影像,设置影像焦距、传感器大小等参数,导入影像pos信息,提交空三运算。空三运算介绍后查看报告,若每对连接点的误差小于1像素,则说明空三结果合格。若连接点误差偏大,则可在进行一次空三运算,进行影像偏差纠正。加入各种辅助数据:摄像头的属性(焦距、传感器尺寸、主点、镜头失真),照片位置,照片旋转度,控制点信息等,输出高分辨率的带有真实纹理的三角网络模型。生成的三维网络模型能够准确精细的表现出建模主体的真实色泽、几何形态及细节构成,从而完成三维模型。
三维建模具体流程如下图。
图7 Smart3D建模流程图
Fig.7 Smart3D Modeling Flowchart
(1)新建工程
利用Smart3D软件建模,首先需新建工程 文件。新建过程中需主要存放路径避免出现中文字符。
(2)影像数据导入
导入外业采集的影像数据,可单张导入,也可按文件夹导入。外业数据采集时,已经GPS定位,影像数据已携带经度、纬度、高度pos数据。导入完成后,自动生成感应器尺寸、焦距、位置和角元素等信息。完成之后可获得像点3D视图如下。
图8 Smart3D新建工程
Fig.8 Smart3D new project
图9 导入影像数据及像点视图
Fig.9 Import image data and image point view
(3)像控点输入
将外业测得的像控点坐标数据输入到Smart3D软件中,以便后期建立的三维模型具有实际的坐标位置。
(4)提交空中三角测量
(根据像控数据,引入影像数据,在室内进行控制点加密,并求得加密点的平面位置和高程。最终确定整个测区的定位,从而获得测区内任意点的绝对位置。)空中三角测量在Smart3D软件环境下进行,该软件可自动进行空三加密,计算出每张影像的位置、姿态角等信息以及确定影像间的相对位置关系。
(5)重新构建模型
空三运算完成后,可进行三维模型重建。Smart 3D软件自动化程度高,按要求输入相关参数并生成结果即得到浏览式三维模型、点云格式及可修饰的三维模型等。
2.3 利用清华三维EPS生成数字线划图
完成三维建模后,利用清华三维EPS软件,采集项目范围内的地物、地貌的特征点,经过图形加工,最终生成1∶500数字线划图。
2.4 成果数据精度分析
对生成的1∶500数字线划图与已有的1∶500地形图成果数据进行了比对,共设置检测点48个,检测点主要设置在建筑拐点,花台拐点等位置明确的地区特征点上[11-13],经比对坐标,各点的平面点位中误差在0.30 m范围内,整体平面中误差为0.21 m。《三维地理信息模型数据产品规范》(CH/T9015- 2012)对1∶500三维模型的精度要求为平面0.3 m;《国家基本比例尺地图1∶500 1∶1000 1∶2000地形图》(GB/T33176-2016)对1∶500地形图平面精度要求为平地0.3 m、山地0.4 m,可见,实验数据在平面位置上满足相关规范的要求。
图10 三维模型成果
Fig.10 3D model results
图11 数字线划图
Fig.11 Dlg, digital line graphic
3 作业过程中相关注意事项分析
3.1 外业测量需要注意的事项:
拍摄前需进行影像质量及飞行质量检查,检查的主要内容为:影像清晰度、色调及反差等,飞行质量检查主要内容为:相机镜头、曝光时间、航摄视角,航向及旁向重叠度、航摄环境条件等[14]。
像控点应选择在目标明显的特征点上,一般 选择道路的交叉点、路标的交叉点等。需注意以下问题:
(1)注意控制点是否会被遮盖,比如阴影处、房角、围墙等容易被遮挡的地方不宜选用控制点。
(2)主要目标与地面有明显的色差,容易分辨。
(3)影像边缘部分清晰度差,像控点不宜布设在测区边缘。
3.2 內业三维建模过程需要主要事项
内业三维建模完成后,一般会存在建筑顶面模型放大后小细节会出现扭曲、拉花等现象。地面植被存在与其他地物粘连、悬浮等现象[15-16]。在内业处理过程中,需注意一下问题:
(1)影像数据需进行预处理
需对影像进行匀光匀色、畸变差改正及POS数据整理。剔除无POS记录和有飞机明显掉头转弯的影像数据,并确保影像和数据有很好的匹配关系。
(2)自动建模时,若数据量大于电脑内存,需进行分区处理。
(3)注意数据组织及存储。数据文件的存储、组织需符合技术设计要求,数据文件格式及命名需满足软件要求,数据文件的完整性需进行注意等。
(4)建模完成后,需对模型完整性进行检查。重点检查建筑主体是否存在模型多余、遗漏等情况,模型扭曲情况及纹理变形情况等。检查场景是否完整,如水面是否存在漏洞、场景是否有接边错误等。
4 结束语
无人机倾斜摄影测量作为新的测绘技术方法及手段,以其高性价比、精度高、便捷高效等优势得到了快速发展。摄影测量数据经Smast3D等专业处理软件建模获得直观性强、效果好的成果数据,经过加工可获得数字线划图、三维实景模型等。
本文主要介绍倾斜摄影测量及三维建模的外业测量操作流程及内业数据处理的技术方法等,并对获得的数据成果质量进行了一定的分析,通过实例进行了演示及分析论证,以期对无人机倾斜摄影测量及三维建模的作业流程、技术方法及质量研究等提供一定的技术参考。
参考文献
[1]邱春霞, 董乾坤, 刘明. 倾斜影像的三维模型构建与模型优化[J]. 测绘通报, 2017(5): 31-35.
[2]闫东, 周乃恩. 彩虹无人机系列应用及展望[J]. 软件, 2018, 39(9): 117-122.
[3]孙杰, 谢文寒, 白瑞杰. 无人机倾斜摄影技术研究与应用[J/OL]. 测绘科学. http://kns.cnki.net/kcms/detail/11.4415.p. 20190412.0933.004.html
[4]毕凯, 赵俊霞, 丁晓波, 刘飞. 倾斜航空摄影技术设计与成果质量检验[J]. 测绘通报, 2017(4): 71-76.
[5]关丽, 丁燕杰, 张辉, 等. 面向数字城市建设的三维建模关键技术研究与应用[J]. 测绘通报, 2017, (2): 90-94.
[6]薄正权, 张宇. 倾斜摄影在长春市城市建模中的应用[J]. 城市勘测, 2016, (3): 93-96.
[7]张毕祥. 基于倾斜摄影测量技术在大比例尺地形图测绘中的研究[J]. 软件, 2018, 39(7): 146-151.
[8]李威, 李国柱. 基于倾斜摄影测量技术测绘地籍图的可行性研究[J]. 软件, 2018, 39(12): 181-186.
[9]梁静, 李永利, 戴晓琴, 等. 基于无人机倾斜影像的数字校园三维重建[J]. 测绘与空间地理信息, 2018, (8): 139, 141, 145.
[10]熊强, 王双亭, 王晓宇, 等. 基于Smart3D的倾斜摄影测量模拟系统三维建模[J]. 测绘工程, 2018, (7): 55-59.
[11]数字航空摄影测量空中三角测量规范: GB/T23236-2009[S]. 北京: 中国标准出版社, 2009.
[12]刘增良, 陈思, 陈品祥. 城市倾斜摄影实景三维模型数据质量检查方法研究与实践[J]. 测绘通报, 2019, (2): 108-112.
[13]柏宏强, 夏永华, 李泽邦, 等. 高海拔山区像控点分布对测量精度的影响分析[J]. 软件, 2018第39卷第9期: 144-148.
[14]张数, 杨德宏. 数字近景摄影测量的二维影像三维建模的关键技术应用[J]. 软件, 2018, 39(2): 133-138.
[15]艾嘉豪, 朱大明. 无人机倾斜摄影测量在三维建模中的应用[J]. 软件, 2018, 39(6): 192-195.
[16]王丙涛, 王继. 基于倾斜摄影技术的三维建模生产与质量分析[J]. 城市勘测, 2015, (5): 80-82.
猜你喜欢
科技资讯(2017年18期)2017-07-19
科学与财富(2016年36期)2017-07-09
中小企业管理与科技·上旬刊(2016年12期)2017-01-05
科学与财富(2016年15期)2016-11-24
人间(2016年26期)2016-11-03
