Job Shop作业车间物料配送小车定位方法研究
2018-12-29 06:36:10徐晓芳刘鑫
机械工程师 2018年1期
徐晓芳, 刘鑫
(合肥工业大学机械工程学院,合肥 230009)
Job Shop作业车间物料配送小车定位方法研究
徐晓芳, 刘鑫
(合肥工业大学机械工程学院,合肥 230009)
针对当前Job Shop作业车间物料配送小车利用不合理问题,提出一种基于RFID和超声波相结合的Job Shop作业车间物料配送小车定位方法。该方法利用RFID技术解决了超声波的发射与接收不在同一侧而带来的同步难题,且利用超声波到达时间TOA(Time Of Arrival)与到达角度DOA(Direction Of Arrival)相结合的方法计算物料配送小车与锚节点之间的距离。实验结果表明,文中所提出的定位方法的定位精度可以达到厘米级,满足Job Shop作业车间内对物料配送小车的定位要求。
Job Shop作业车间;超高频RFID技术;超声波技术;TOA;DOA
0 引 言
Job Shop作业车间内物料流转比例占整个生产制造过程的90%以上[1],常见的人工叉车和AGV配送工具往往存在人工参与程度高、全局性差[2]和运动轨迹固定[3]等问题。若能实现物料配送小车的实时定位与导航,可使生产管理者更加合理有效地利用物料配送小车,实现物料配送小车按时完成指定的配送任务,进而避免车间生产过程停产、停线、产品不能如期交货等系类问题[4]。
目前,室内定位技术主要有:视觉导航定位技术、电磁导航定位技术、激光定位技术、超声波定位技术、RFID定位技术等[5]。其中视觉导航定位技术受车间内地面清洁度与光线影响,在定位精度和速度方面存在缺陷[6];电磁导航定位技术在Job Shop作业车间内易受切屑等铁磁物质的干扰[7];激光传感器受室内光线影响较大且成本较高[8];超声波定位技术具有成本低廉、采集信息速率快、不受环境光照以及障碍物影响等优点[9],但超声波信号受距离影响较大,不适合远距离测距;RFID技术具有非接触以及无视线的优点,并能在几毫秒的时间范围内获得具有厘米级精度的目标定位,其适应性强、成本低、传输范围广,目前已成为室内定位的首选技术[10]。
综合分析以上各种室内定位技术的特点,以及考虑技术成本、可靠性和Job Shop作业车间环境特点,文中采用RFID与超声波相结合的定位方法实现物料配送小车的实时定位和导航。
1 定位系统及方法
1.1 定位系统
本文提出的Job Shop作业车间物料配送小车定位方法主要基于由MIT开发的可轻松随意部署的定位系统Cricket[11],并基于Cricket系统加以改进,图1为本文提出的定位系统硬件图,其工作原理如下:单片机控制RFID发射器分时向四周发射不同频率的RF信号并立即启动它的定时器,作为计时初始值,FRID读写器在接收到对应的RF信号后启动超声波发射器发射超声波信号,当超声波接收器接收到相应的信号时,单片机就立即将其定时器关闭,并把这个值作为计时终值。从而实现对物料配送小车的位置进行精确定位,并通过WIFI通讯模块将智能配送单元位置信息上传至主系统。RF信号的传播速度很高,大约是3×108m/s,而超声波的传播速度较低,大约是3.41×102m/s,因此在定位计算过程中,可忽略RF信号的传播时间,一定程度上可解决因为超声波的发射和接收装置不在同一侧而引起的同步难题[12]。

图1 硬件拓扑图
1.2 物料配送小车位置计算单元设计
在Job Shop作业车间物料配送小车实时定位系统中,将位置计算单元(Position Calculation Unit PCU)嵌入到物料配送小车上,PCU中的微控制器利用超声波到达时间参数与到达角度参数计算出物料配送小车至各锚节点的距离。文中将采用具有两个平行放置的接收器的PCU装置接收超声波信号,这两个接收器接收超声波信号的时间是不一样的。当传播距离差小于信号波长时,体现为某一相位差,因此可以通过检测两个接收器上获得的信号相位差值得到锚节点与未知节点的夹角θ,如图2所示。

图2 超声波测向原理
为了更加全面地接收超声波信号,文中将PCU装放在物料配送小车的正上方。由于物料配送小车不是一个点,而是有一定尺寸范围的移动机器,因此在定位前需先计算出物料配送小车相对于PCU的位置。在定位过程中,首先需计算出PCU在Job Shop作业车间的空间位置,然后通过该位置信息获得物料配送小车在Job Shop作业车间的空间位置,完成物料配送小车的实时定位。
2 定位算法
文中对物料配送小车定位算法的研究将从以下两个方面展开。
1)时间参数计算。文中基于超声波在空气中的声速v与从锚节点发射超声波到未知节点接收到相应的超声波所产生的时间差t之间的乘积[13],获得未知节点和锚节点的距离S为

文中考虑车间内空气中的温度对超声波声速影响较大[14],为了提高精度,需要对超声波的声速进行重新调整。

2)角度参数计算。假设锚节点与超声波接收器的距离远大于两个接收器之间的距离d,则两束声波传播距离之间的夹角是比较小的,因此当超声波信号与接收面垂直夹角为θ时,两束超声波传播的距离差为Δl=d×sinθ,由此得到两个接收器接收到的信号相位差:

常用40 kHz的超声波的波长λ一般取值为8.5 mm,采用40 kHz频率的超声波进行测量可获得较高的灵敏度[15],超声波方向角的计算公式为

通过以上公式可知,只要获得相位差Δφ,即可获得方向角θ。利用鉴相电路获得相位差Δφ与输出电压Uo的关系:Δφ=k×Uo,通过测得输出电压Uo,也就可以求出相位差Δφ的值。

式中,k为转换的比例系数。
3 实 验
为了验证本文所采用的Job Shop作业车间物料配送小车定位方法的可行性与准确性,我们做了以下实验:实验场景为模拟Job Shop作业车间工作环境的室内实验室,室温28℃,实验空间1600 cm×1600 cm×400 cm;锚节点的空间坐标已知;物料配送小车的尺寸大小为150 cm×80 cm×100 cm,RFID标签安装在物料配送小车中间正上方,超声波接收器分别安装在车头和车尾正上方处。选取试验区域内8个固定坐标,物料配送小车以一定的速度在实验区域内匀速行进,并经过这8个已知点,物料配送小车空间坐标误差测量结果如表1所示。
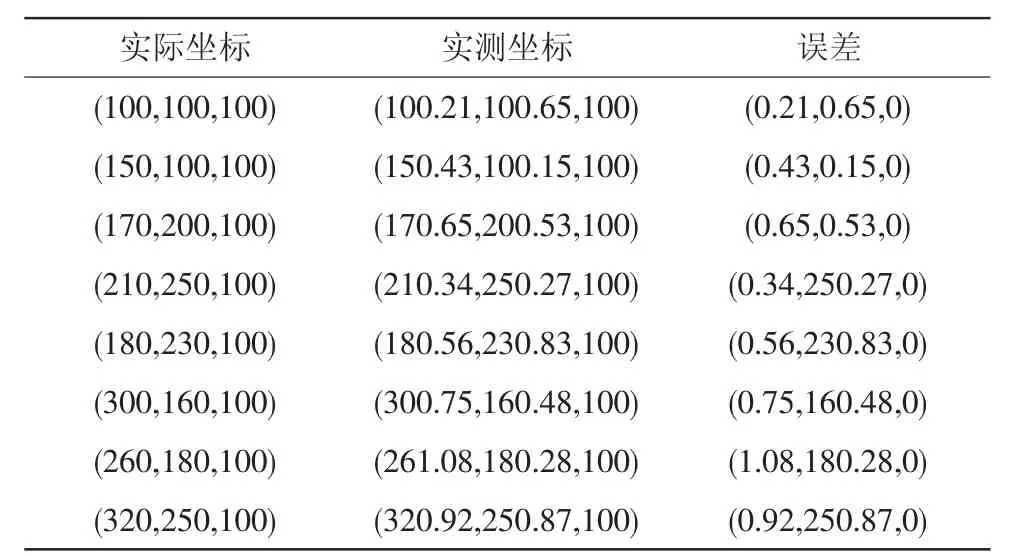
表1 空间坐标误差测量结果
4 结 论
文中采用了RFID与超声波相结合的定位方法,以实现Job Shop作业车间物料配送小车的实时定位与导航,并采用TOA与DOA相结合的定位算法进行求解获得物料配送小车的空间位置。最后进行相关实验,结果表明,文中所采用的物料配送小车定位方法具有精度高、成本低、稳定性好等优点,可以达到Job Shop作业车间物料配送小车自主定位要求。
[1] 刘书岩,梅中义.航空复合材料车间物料配送系统的研究[J].现代制造工程,2009(5):29-32.
[2] 张莉.离散制造企业生产物流系统设计研究[D].济南:山东大学,2012.
[3] SRIVASTAVA S C,CHOUDHARY A K,KUMAR S,et al.Development of an intelligent agent-based AGV controller for a flexiblemanufacturingsystem[J].InternationalJournalofAdvanced Manufacturing Technology,2007,36(7):780-797.
[4] 周光辉,张红州,张映锋,等.基于RFID的数字化制造车间物料实时配送方法[J].应用科技,2010,37(4):1-5.
[5] 汪苑,林锦国.几种常用室内定位技术的探讨[J].中国仪器仪表,2011(2):54-57.
[6] 齐立磊,梁智学,冯高峰.一种基于高频RFID的室内定位方法的设计与实现[J].计算机与数字工程,2013,41(4):673-675.
[7] 王皖君,张为公.自动导引车导引技术研究现状与发展趋势[J].传感器与微系统,2009,28(12):5-7.
[8] LEE J H,LEE C M,LEE K K.A modified path-following algorithm using a known algebraic path [J].IEEE Transactions on Signal Processing,1999,47(5):1407-1409.
[9] 洪林.移动机器人超声波室内定位系统研究[D].南京:南京理工大学,2012.
[10]KUNG H Y,CHAISIT S,PHUONG N T M.Optimization of an RFID location identification scheme based on the neural network[J].InternationalJournalofCommunicationSystems,2013,28(4):625-644.
[11]PRIYANTHA N B.The Cricket indoor location system[J].Massachusetts Institute of Technology,2005.
[12]YAYAN U,YUCEL H,YAZICI A.A Low Cost Ultrasonic Based Positioning System for the Indoor Navigation of Mobile Robots[J].Journal of Intelligent&Robotic Systems,2015,78(3-4):541-552.
[13]王富东.超声波定位系统的原理与应用[J].自动化与仪表,1998(3):15-17.
[14] 卜英勇,王纪婵,赵海鸣,等.基于单片机的高精度超声波测距系统[J].仪表技术与传感器,2007(3):66-6.
[15]李昌禄,苏寒松.超声波定位系统的研究[J].实验室研究与探索,2013,32(2):39-44
Research on Location Method of Job Shop Material Distribution Car
XU Xiaofang,LIU Xin
(School ofMechanical Engineering,Hefei UniversityofTechnology,Hefei 230009,China)
Considering the unreasonable utilization of distribution tools oriented to present Job Shop,this paper explores the location method of material distribution car by combining the RFID technology with the ultrasonic technology.This location method can solve the synchronization problem that the ultrasonic transmitting and receiving are not on the same side.Based on this,the distance between the material distribution car and the anchor node is calculated by combining the time of arrival of TOA(Time Of Arrival)with DOA(Direction Of Arrival).Finally,the experiment results show that the location accuracy of this location method can reach centimeter level,and can meet the location demand of the material distribution car in Job Shop.
Job Shop;RFID technology;ultrasonic technology;location method;TOA;DOA
TH 18
A
1002-2333(2018)01-0055-03
(编辑启 迪)
徐晓芳(1991—),女,硕士研究生,研究方向为制造过程监测与控制。
2017-03-30
猜你喜欢
智能制造(2021年4期)2021-11-04 08:54:28
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
小学生学习指导(中年级)(2018年11期)2018-11-29 08:56:18
文苑(2018年22期)2018-11-19 02:54:18
铁道通信信号(2018年8期)2018-11-10 05:15:48
电子制作(2018年8期)2018-06-26 06:43:02
农村农业农民·B版(2018年11期)2018-01-28 13:28:12
南方人物周刊(2017年25期)2017-08-25 06:06:50
中国老区建设(2016年12期)2017-01-15 13:54:08