
低频减载虚拟实验平台设计与实现
2018-12-27 03:28韦明杰张恒旭房田郁
电气电子教学学报 2018年6期
韦明杰, 张恒旭, 房田郁
(山东大学 电气工程学院, 山东 济南 250061)
0 引言
虚拟实验是借助于多媒体、计算机仿真或虚拟现实技术等产生并发展的一种实验模式,也是教育领域应用信息技术的创新式发展。它打破了传统的教学概念,对改善现有的教学实验环境、促进课堂教学的多样化、推动我国人才教育模式从培养经验型人才向培养创新型人才转变具有重大意义。
电力系统的低频减载是“电力系统自动化”课程中的重要教学内容。结合虚拟实验对电力系统低频减载过程进行展示,既丰富课堂教学内容,其直观清晰的演示过程也能加深学生对相关知识的理解;在实验教学过程中,结合虚拟实验可方便、安全地修改实验参数并分析不同的实验结果,有利于培养学生的科学意识和创新意识。
目前,我国高校电气学科普遍缺乏对低频减载有关内容的实验教学,少有的相关实验开展采用的实验平台也是以硬件设备为主,相对于虚拟实验方式,在安全、经济、维护、灵活性和拓展性上都存在不足。此外,目前广泛采用的低频减载仿真方法主要是在综合仿真软件如PSS/E或PSASP等商业程序中搭建模型,并编写考虑对应低频减载整定算法的自定义模块来实现的[1~2]。该过程操作复杂,对编程能力要求高,并不适合在教学实验中推广。
电力系统低频减载的整定方法主要包括传统法、半适应法、自适应法和以神经网络、遗传算法为代表的计算机辅助算法[3~8]。其中,传统法由于其原理简单,安全性高,因而在目前的电力系统中应用最为广泛。
本文以传统法作为低频减载整定方案,设计并开发了一款低频减载可视化虚拟实验平台。文中介绍了虚拟实验平台的仿真系统和仿真模型的建立、算法的实现以及基于Python的程序内核的设计开发方案;设计了基于PyQt软件的虚拟实验平台人机交互界面、与程序内核建立接口、实现可视化的虚拟实验仿真;以此为基础,针对本科期间的实验教学,提出了一套低频减载虚拟实验方案,从单机和多机系统两方面明确实验内容和目标。
1 低频减载虚拟实验平台
1.1 模型的建立
低频减载虚拟实验平台的功能实现分为单机系统和多机系统两部分。对于网络结构,单机系统统一采用图1所示的单机三负荷系统;多机系统可以实现对任意节点的小规模电网的仿真计算。系统忽略电压和无功的影响。对于负荷模型,单机和多机系统均采用静态负荷模型。对于发电机模型,可以进而忽略励磁系统的影响,仅需考虑原动机-调速器系统模型。低频减载可视化虚拟实验平台的原动机-调速器系统可采用经典模型、IEEEG1汽轮机模型和IEEEG3水轮机模型[9~10]。后两者的模型框图如图2(a)和图2(b)所示。
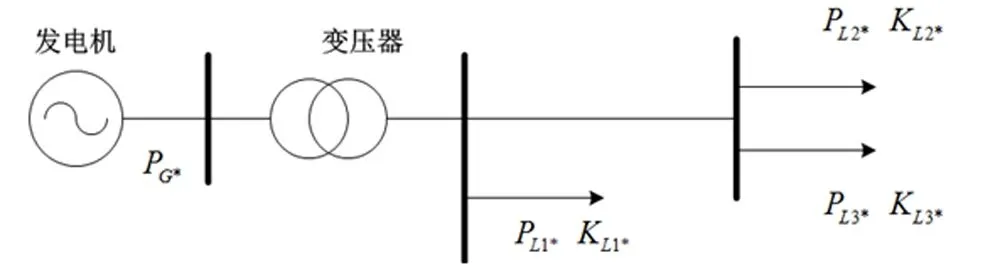
图1 单机三负荷模型
对单机系统的低频减载过程动态分析采用单机等值模型,示于图3(a)。采用经典原动机-调速器模型时,系统方程表示如下:
(1)
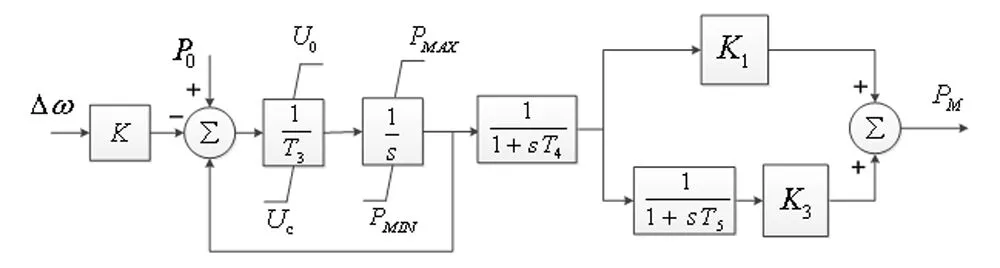
(a)IEEEG1汽轮机原动机-调速器系统模型
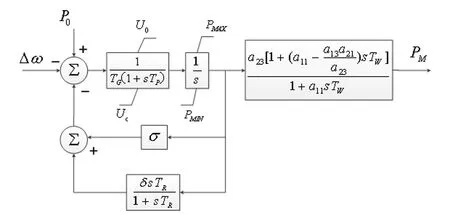
(b)IEEEG3水轮机原动机-调速器系统模型 图2 原动机-调速器系统模型框图
其中,ΔPL*、ΔPG*和ΔPLshed*分别表示在负荷频率静态特性、发电机一次调频作用和低频减载装置切除负荷影响下系统发电侧和负荷侧有功功率的变化量;ΔPD*表示系统初始时刻有功功率扰动。
对多机系统的频率动态分析采用多机平均频率模型ASF(Average System Frequency)如图3(b)所示,该模型重点在于研究频率响应的统一性和稳定控制的独立性,主要适用于不发生大的无功和电压波动的系统[11]。相对于全时域仿真,ASF模型在保证了一定仿真精度的同时,可以大幅度地减小仿真的计算量和仿真时间。
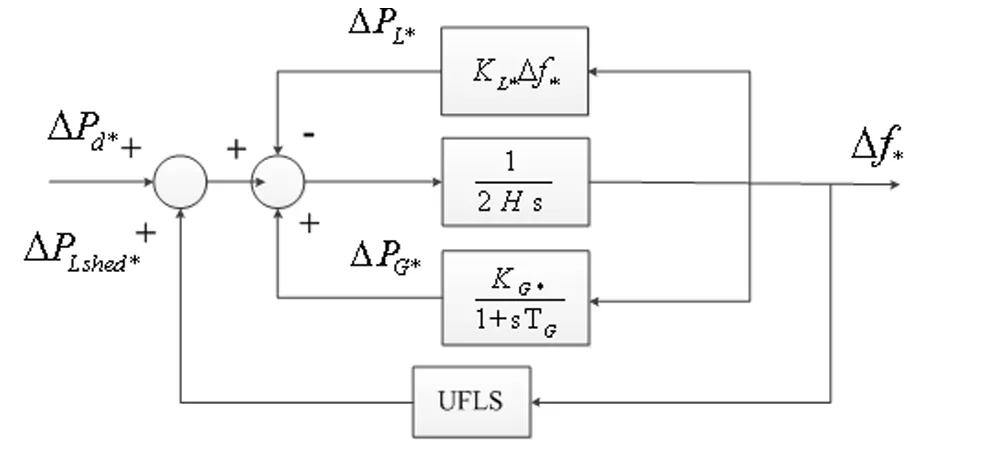
(a)单机等值模型框图
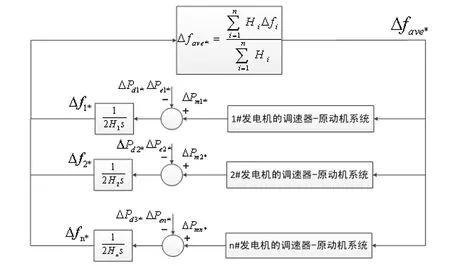
(b)多机平均系统频率模型框图图3 频率动态分析模型
1.2 模型的求解方法和程序实现
仿真的系统由于忽略网络参数的影响,其求解过程主要就是对微分方程组的求解。对微分方程组的求解采用改进欧拉法[12]进行迭代,迭代步长 取0.01 s。以公式(1)为例,设其对应参数初始值为Δf(0)和ΔPG*(0),则迭代公式可以写成:
(2)
其中:
(3)
低频减载可视化虚拟实验平台的程序开发是基于Python语言。其中,单机系统部分程序的运行流程如图4所示,包括参数读取部分、主程序部分和结果输出部分。多机系统部分所采用的ASF频率动态分析模型考虑的是频率变化的统一性,因而在进行微分方程组部分的求解过程中,相当于是对多个单机系统计算过程的叠加。
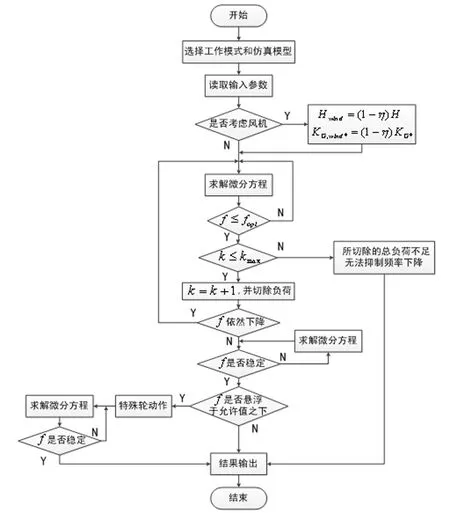
图4 低频减载虚拟实验平台单机系统部分程序运行流程图
2 平台人机交互界面的设计
低频减载可视化虚拟实验平台的界面设计利用PyQt软件完成,并且与采用Python语言开发的程序包建立接口,实现人机交互。实验平台界面的设计包括单机系统部分和多机系统部分两个子界面。图5是单机系统的仿真界面。

图5 低频减载实验平台单机系统仿真界面
界面左上角是菜单栏和工具栏,主要负责管理整个仿真过程和仿真结果。界面的主体部分包括参数设置模块、模型选择模块、工作模式选择模块以及结果输出模块。
对于单机系统的参数设置部分从左至右、从上至下依次是系统参数、负荷参数、发电机参数、风机参数、特殊轮参数、基本轮参数和扰动设置参数。
模型选择模块是对发电机模型选择,包括经典模型、IEEEG1汽轮机模型和IEEEG3水轮机模型。
工作模式选择模块是选择实验平台的仿真模式。为了便于实际的实验操作,低频减载可视化虚拟实验平台设计了两种工作模式:单系统仿真模式和双系统对比模式。前者是针对单个系统的整个过程进行仿真,包括低频减载基本轮和特殊轮的动作,重点在于分析低频减载的整体动态过程;后者是通过添加新的系统并设置相关参数来对比两个系统的仿真结果,仿真过程不考虑特殊轮的动作,且仿真图像只反映频率的变化,其重点在于认识某个或某些参数的变化对低频减载过程频率特性的影响。
当所有参数设置完毕后,点击“计算”按钮或工具栏中的“开始”键即可开始仿真。仿真结果包括图形和文本两部分,其中图形在仿真结束后会以弹窗形式出现,文本则会直接在界面上“结果输出”框中生成。图像参数的动态过程数据会保存至默认地址,图形可以通过菜单栏“编辑”中的“图像保存”保存至相应的位置。
多机系统部分的仿真界面主体结构与单机系统部分基本相同,只是在一些仿真参数和模型的设置上存在差异,两个界面可以通过单击右上角的箭头按钮进行切换。
3 低频减载虚拟实验方案设计
低频减载虚拟实验平台针对的是本科阶段的实验教学,为了便于规范实验内容,本节提供了与实验平台功能相配合的低频减载虚拟实验方案,并结合实际算例对部分方案进行说明。实验方案的设计框架如图6所示,总体分为单机系统和多机系统两个部分,并以单机系统部分的实验内容为主。
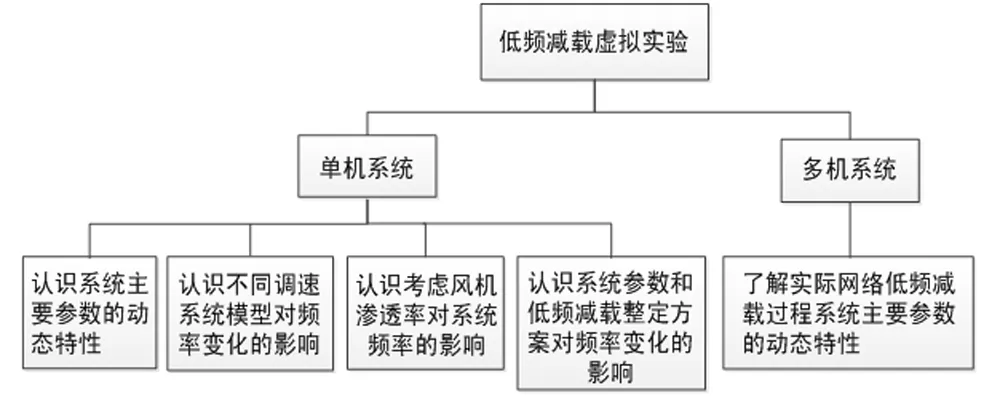
图6 低频减载虚拟实验方案总览
3.1 认识低频减载过程中系统的参数特性
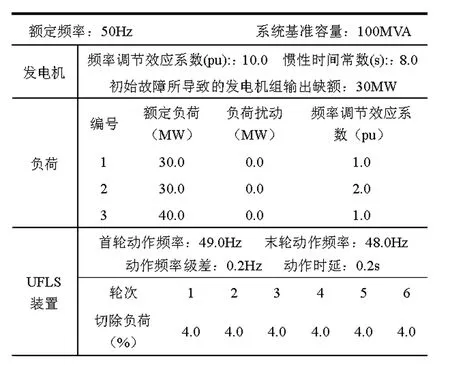
在单机系统中采用单系统仿真模式,并设置好系统参数,在同时考虑基本轮和特殊轮参与切除负荷的情况下,得到考虑特殊轮时仿真图像如图7所示。
此外,仿真结果还包含文本形式的输出如表1所示。表中包括系统参数和仿真结果两部分。
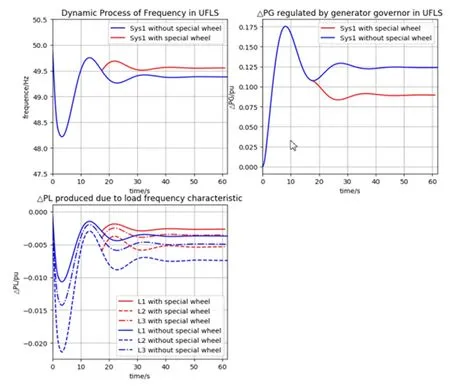
图7 考虑特殊轮时仿真图像示例
表1考虑特殊轮时仿真结果文本输出
(a)系统参数部分
(b)仿真结果部分

3.2 认识不同调速系统模型对频率的影响
系统仿真的结果一定程度上受到选取的系统模型的影响。当单机系统采用忽略无功、电压的简化静态负荷模型时,发电机原动机-调速器模型的选取对仿真结果的影响最为显著。在平台仿真界面上的模型选择模块分别采用经典模型、IEEEG1汽轮机模型和IEEEG3水轮机模型进行仿真,认识不同调速系统模型对频率变化的影响。
通过该部分的实验仿真,可以观察并初步归纳出三种调速系统模型对系统频率变化影响的规律,比如采用水轮机调速系统模型时,系统频率变化的惯性更大,导致频率下降的最低值更低,相对于汽轮机模型稳定得更慢;经典模型由于其本身的高度简化,忽略了许多实际调速系统的惯性调节环节,因此频率的振荡幅度更大等。
3.3 认识系统参数和整定方案对频率的影响
在电力系统低频减载过程中,频率曲线的走势大体上是一致的,但对于不同的系统,频率变化的速率、所达到的最低值、振荡幅度以及恢复稳定时的大小均存在一定的差异,这个差异主要是由系统的参数和低频减载的整定方案所决定的,包括发电机的类型和规格、负荷的种类、负荷切除顺序以及切除负荷量等等。
在单机系统部分,采用仿真软件的双系统对比模式,通过修改某一个系统参数,将修改参数后的系统与原系统低频减载过程的频率图像进行对比,以此来认识系统参数对频率变化的影响。此外,利用该模式也可以通过修改系统低频减载的整定方案来认识诸如采用不同负荷切除顺序、各轮动作频率以及各轮切除负荷量等对系统频率变化的影响。
3.4 认识考虑风机渗透率对频率的影响
风机渗透率是指风机容量在整个系统发电机总容量中的占比。考虑风机的单机系统模型参考于文献[13],即当不含附加频率控制策略时,双馈风机是采用PWM控制策略实现转子转速与电网频率的解耦控制,因而风机不参与调频,且转子转速不受频率变化的影响。进行仿真操作时,只需在界面上勾选“考虑风机并网”选项,并设置风机渗透率的大小即可。既可以选择单系统仿真模式来认识考虑风机渗透率后系统低频减载过程的动态特性;也可以选择双系统对比模式将考虑风机渗透率的系统与不考虑风机渗透率的系统或者将两个风机渗透率不同的系统进行对比,从而更为清晰直观地了解风机渗透率对电力系统低频减载过程中频率动态特性的影响。
3.5 了解实际系统低频减载过程的参数特性
通过对低频减载可视化虚拟实验平台的多机系统部分的仿真,可以使学生在实验过程中宏观了解实际的电力系统低频减载过程中主要参数与低频减载效果的关系。以IEEE3机9节点系统的仿真为例。其中,三台发电机分别有一台采用IEEEG3水轮机调速模型,另两台采用IEEEG1汽轮机调速模型,仿真结果如图8所示。
从仿真图像的频率曲线中可观察到频率变化的统一性;从发电机机械功率变化量曲线中观察到各台发电机稳定控制的独立性以及由于水轮机的水锤效应引起的功率变化短暂的惯性现象。
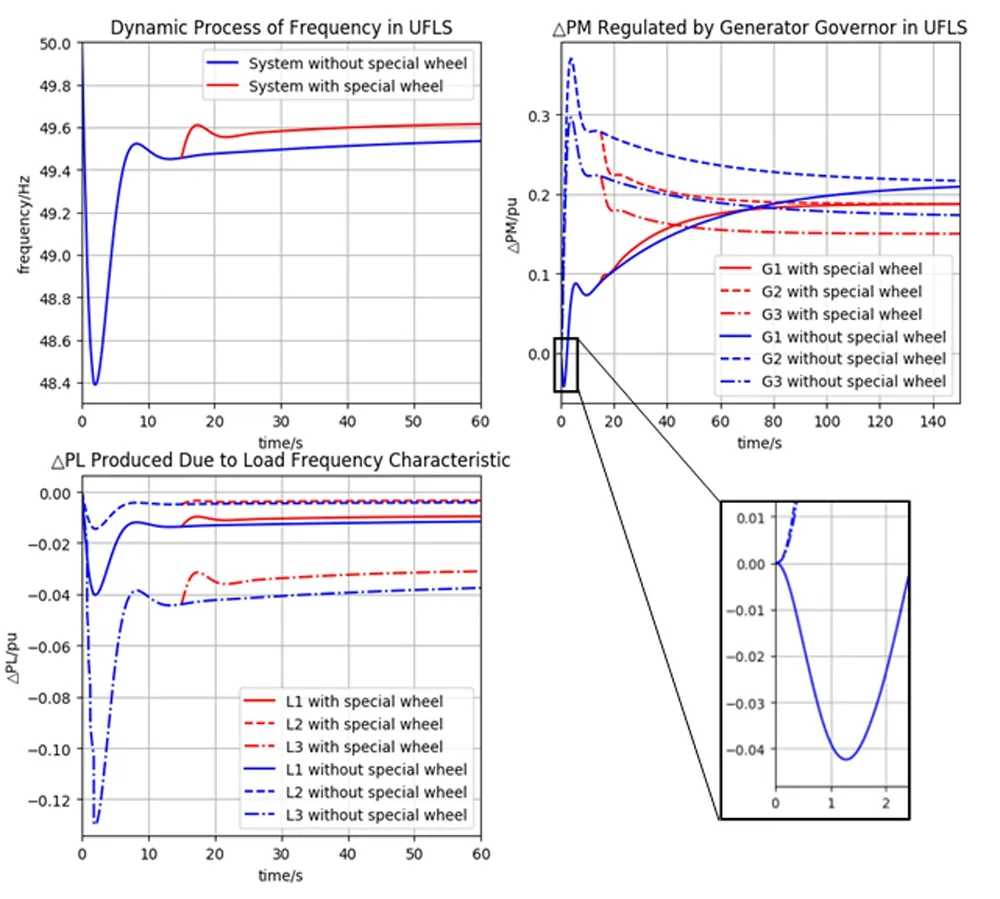
图8 对IEEE3机9节点系统的仿真图像
3.6 程序正确性校验和ASF模型仿真精度检验
低频减载虚拟实验平台的程序正确性校验是通过在Simulink中搭建与软件仿真相对应的模型进行仿真,并将仿真结果与实验平台的仿真结果进行对比而实现的。
以对多机系统部分的程序进行正确性校验为例:选择IEEE3机9节点系统进行仿真,并在Simulink中搭建相应模型,将两者仿真结果对比,其结果如图9所示。同样地,对IEEE10节点、IEEE14节点等系统也进行了程序正确性检验,得到了类似的检验结果,验证了程序的正确性。
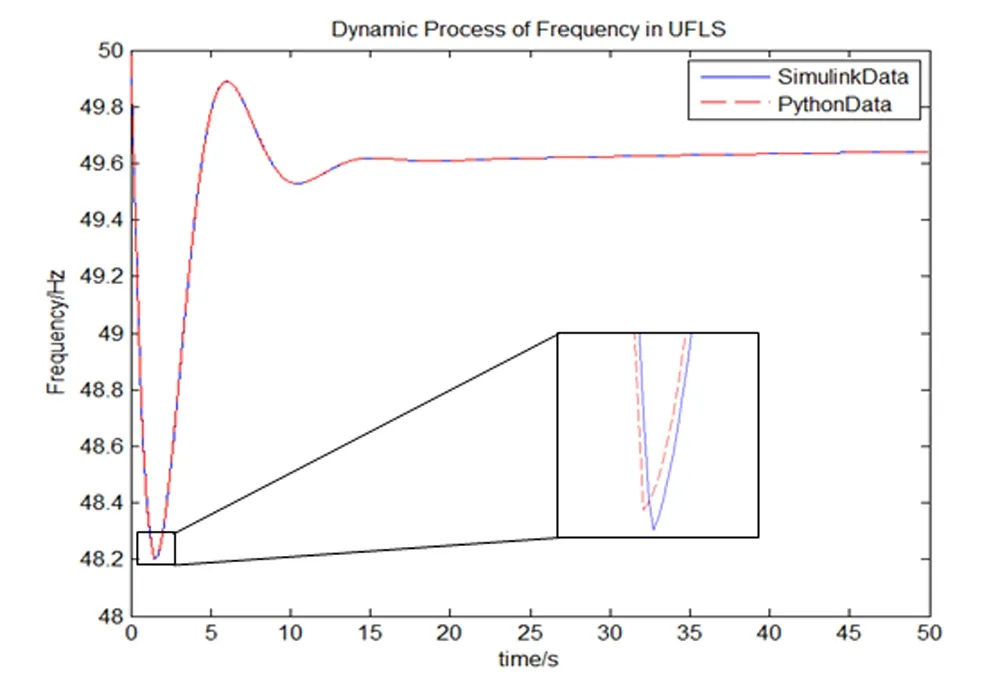
图9 程序正确性校验
低频减载可视化仿真软件的单机系统部分重点在于认识电力系统的低频减载过程以及参数特性,且不存在对实际系统的等值过程,因而无需进行模型仿真精度的检验;多机系统部分重点在于对实际系统的低频减载过程进行仿真,仿真结果的准确性与采用模型的精度有着密切联系,因而需要对其采用的ASF频率动态分析模型进行仿真精度的校验。
模型精度校验利用PSS/E软件实现。在PSS/E中搭建IEEE3机9节点系统和NPCC-140节点系统,分别设置扰动进行仿真,并与低频减载虚拟实验平台的仿真结果进行对比,其结果分别示于图10(a)和图10(b)。根据校验结果,多机系统采用ASF模型进行频率动态仿真的精度可以满足教学实验的要求。
(a)IEEE3机9节点系统
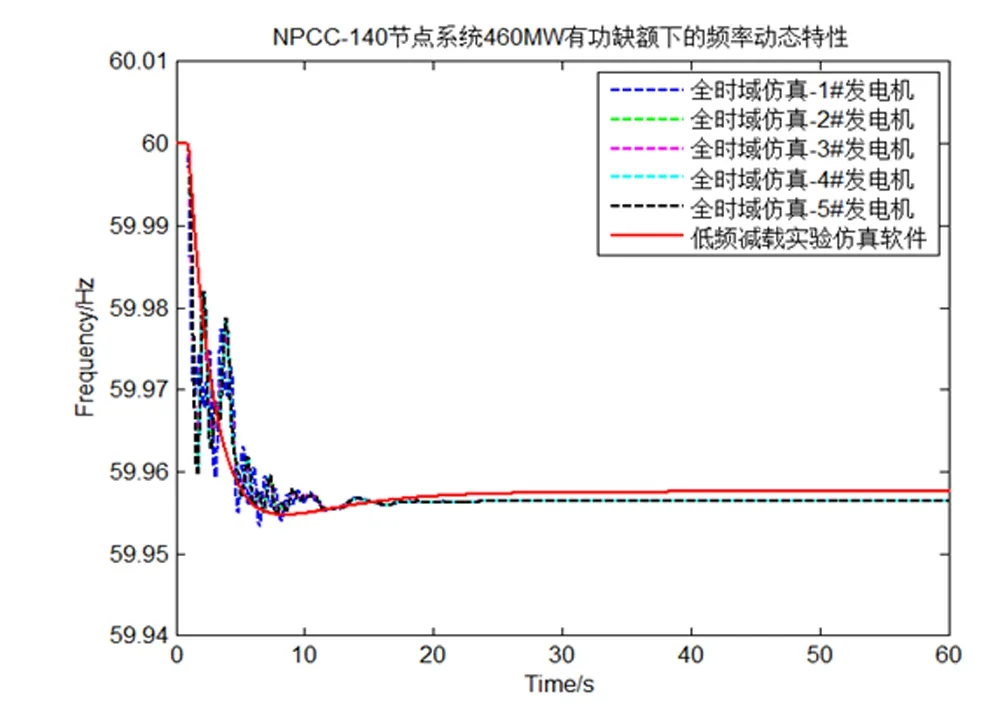
(b)NPCC 140节点系统 图10 软件仿真精度校验
4 结语
本文针对目前高校对电力系统低频减载实验教学的缺失以及综合型仿真软件操作复杂、编程要求高的现状,结合“电力系统自动化”课程的实际教学需求,设计并开发一款针对于本科阶段实验教学的低频减载可视化虚拟实验平台,并提出一套低频减载虚拟实验方案。实验平台根据实验教学的需求分别设计了单机和多机系统两个部分、四种模型以及两种工作模式。通过单机系统部分的实验让学生认识电力系统低频减载的工作流程和参数的动态特性;通过多机系统部分的实验内容让学生了解实际电力系统低频减载中主要参数和低频减载效果的关系。最后,通过Simulink和PSS/E进行了程序正确性和ASF动态分析模型仿真精度的验证。
多机系统采用的ASF动态分析模型仅适用于无功、电压不发生大的波动的系统,且由于忽略了网络参数,得到的除了频率之外其他两个参数变化曲线的仿真结果存在局限性。需要进一步将网络参数、无功和电压数据纳入软件程序的考虑范畴,提高模型的准确度和适用范围。
猜你喜欢
新疆钢铁(2021年1期)2021-10-14
航天工业管理(2019年11期)2019-04-20
铁道通信信号(2019年2期)2019-03-26
能源(2018年5期)2018-06-15
能源(2017年9期)2017-10-18
能源(2017年9期)2017-10-18
现代工业经济和信息化(2016年12期)2016-05-17
西部广播电视(2015年17期)2016-01-18
安徽冶金科技职业学院学报(2015年3期)2015-12-02
中国交通信息化(2015年1期)2015-06-05
