
像素预测误差耦合极限学习机的图像水印算法
2018-12-22 07:40潘强,印鉴
计算机工程与设计 2018年12期
潘 强,印 鉴
(1.珠海城市职业技术学院 经济管理学院,广东 珠海 519090;2.中山大学 数据科学与计算机学院,广东 广州 510006)
0 引 言
如何保护图像信息的安全性,是当前各国的研究热点[1-4]。为此,各国学者提出了水印技术,它是将水印数据隐藏到载体信号来修改初始图像的内容,形成水印图像[4]。如李树全等[5]设计了基于彩色图像的新型LSB半盲数字水印方案,基于LSB机制,设计水印信息嵌入方法,并将置乱水印密文嵌入到彩色载体图像的R、G、B三分量中,获取最终的水印图像,但此方法是将水印信息随意嵌入到载体像素中R、G、B三分量,不能准确预测像素值,使其嵌入累积失真较大。SaeidFazli等[6]基于DWT、DCT与奇异值分解,提出了一种鲁棒图像水印方法,利用DCT机制,设计了水印嵌入技术,将水印数据嵌入到载体图像的频域子块中,同时,借助奇异值分解获取载体图的角点,建立了水印检测机制,提取水印信息,但角点的提取易受几何攻击的影响,使其算法稳定不佳,削弱了水印图像的不可感知性。Zhang等[7]提出了基于整数小波变换与位集的图像水印算法,利用Laplace算子与位集方法确定出稳定边缘轮廓中的单位圆,将单位圆分割为非重叠方形区域,利用嵌入机制,将水印信息植入到非重叠方形区域,但Laplace算子易受噪声影响,且其难以准确预测载体图像的像素,使其存在较大的嵌入失真。
为了降低水印信息的嵌入失真问题,本文设计基于像素预测误差扩展与优化的极限学习机的图像水印算法。构造像素交叉混淆技术,对水印信息完成加密;利用变尺度混沌来优化对极限学习机,提高其预测精度,并引入像素预测误差扩展方法,设计水印信息嵌入机制,将水印数据嵌入到载体图像中的像素误差值接近零的像素中,充分降低嵌入失真。同时,利用相应的水印提取技术,联合解密密钥,复原水印信息。最后,测试了所提水印算法的不可感知性与失真度。
1 本文图像水印算法设计
所提基于像素预测误差扩展与优化的极限学习机的图像水印算法如图1所示,主要有:①基于像素交叉混淆机制的水印置乱;②水印信息的嵌入;③水印信息的检测。
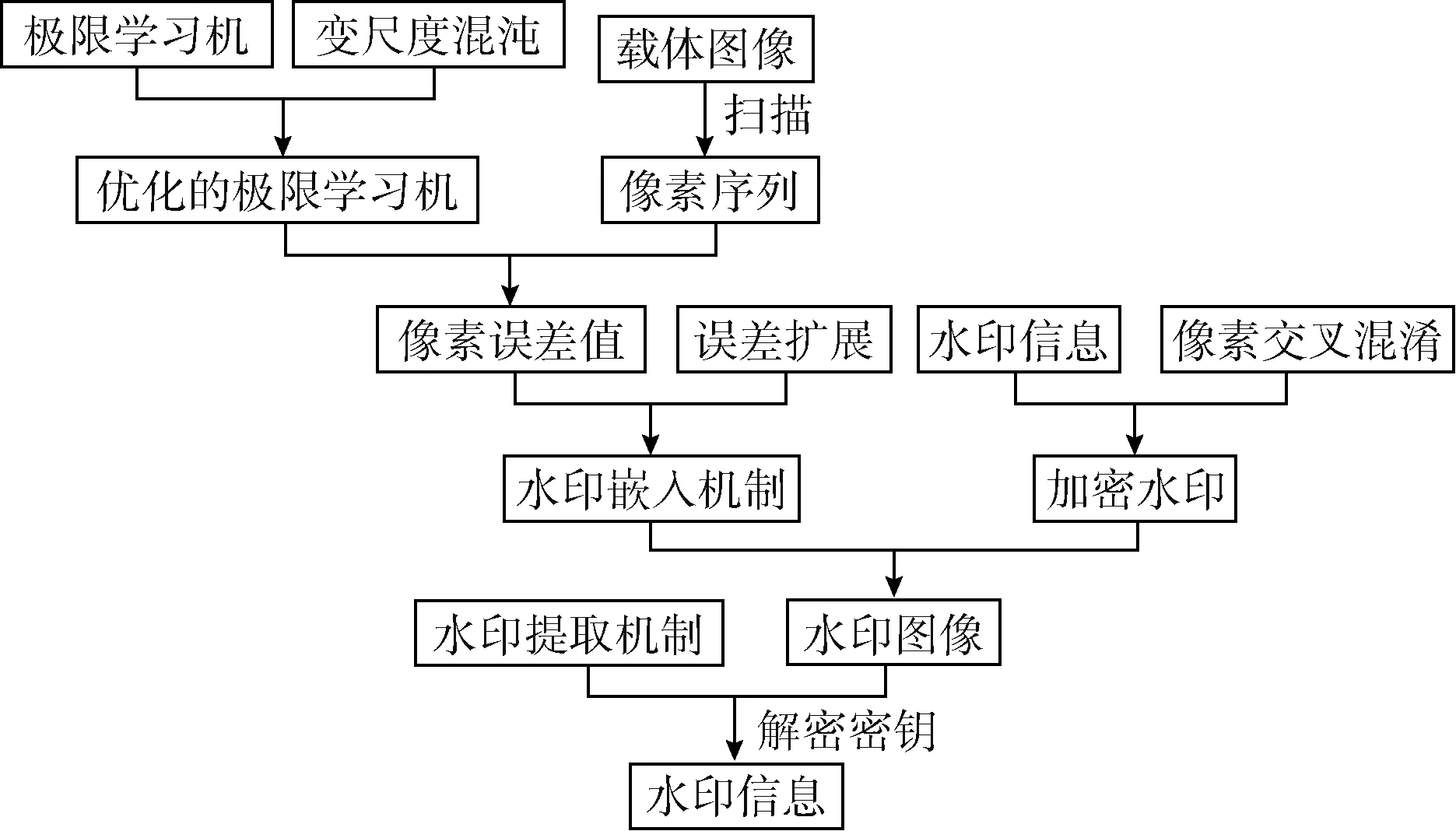
图1 本文图像水印算法过程
1.1 基于像素交叉混淆机制的水印置乱
为了改善水印信息在载体中的隐秘度与抗外来攻击性能,本文联合锯齿扫描技术[8]与Logistic映射[9],构建了像素交叉混淆机制来加密水印信息,将其信息彻底打乱。令水印信息图像的尺寸为M×N,利用锯齿扫描技术[8],将水印信息图像转换成像素序列P={P(1) …P(M×N)}。锯齿扫描函数为[10]
(1)
其中,a是曲线高度;T为曲线周期。
依据锯齿扫描技术,把水印信息图像将扫描为1D序列P={P(0),P(1), …,P(M×N-1)}。同时,令混淆图像的1D序列C=C(0),C(1), …,C(M×N-1)。若L是当前像素位置;L′是交叉位置。则其L′的计算函数为
L′=L+SPL+CL-1modM×N-L
(2)
式中:CL-1为像素灰度值;L是当前像素位置;L′是置乱后新位置;SPL是Logistic映射的序列值,其函数如下[9]
xn+1=λxn1-xn
(3)
其中,λ∈0,4为混沌参数。
再利用式(2)的像素位置L′来构造像素交叉混淆方法
C(L)=P(L′)=P(L+(SP(L)+
C(L-1))mod(M×N-L))
(4)
PR′=PR
(5)
为了清楚解释所提的像素交叉混淆技术,在明文中随机选取7个不同位置的像素,如图2所示。令图像中A之前的像素都已混淆,而其之后的像素B,C,D都是等待混淆的对象,如图2(b)所示;本文提出的混淆方法,是利用像素B,C,D来交换E,F,G的位置。由图2(b)可知,像素PC被交叉互换到PK的位置,初始水印信息中的其它所有未经混淆的像素均按照图2(a)、图2(b)进行置乱,获取水印密文。
通过利用上述像素交叉混淆方法,提高了水印图像中的每个像素的混淆程度,使其呈现一副与初始水印信息完全不同的水印密文,从而改善了算法的不可感知性与抗攻击能力。以图3(a)为例,利用本文像素交叉混淆方法对其加密,得到水印密文如图3(b)所示。由图3可知,初始水印的信息被充分打乱,较好地隐秘了其信息,显著增强了其不可感知性。
1.2 水印信息的嵌入


(6)

图2 像素交叉混淆机制

图3 基于像素交叉混淆的水印加密


图4 极限学习机的网络训练过程
再根据式(6)的输出矢量oj,计算其代价函数ES
(7)
S=wi,cii=1,2,…,M
(8)
由文献[13]可在,极限学习机的训练目标就是寻找最优的S;再根据最优S,得到网络输出值与真实值的最小误差minES

(9)
其中,H,β,T分别为隐层的输出矩阵、输出层的输出矩阵以及目标矩阵。

(10)
其中,H+是H的Moore Penrose广义逆矩阵。
但是,当前的极限学习机是随机选择网络输入权值和隐层节点的阈值[13],导致其泛化能力与回归模型的稳定性较差。为此,本文通过搜索与调整变尺度混沌来优化极限学习机,从而获取最优的输入权值与隐层节点的阈值。为此,根据式(7)~式(8),将式(9)简写为
(11)
其中,S=wi,cii=1,2,…,M;wi,ci分别是输入权重与隐层节点阈值。
为方便算法描述,引入两个变量ai,bi,ai≤wi,ci≤bi,将S=wi,cii=1,2,…,M记为S=(zi,i=1,2,…,L)。其中,ai≤zi≤bi。



(12)
(13)
(4)令k=k+1,继续执行xk+1=λxk1-xk。
(5)反复执行步骤(2)~(4),直到在一定步数范围内E*保持不变。随后,执行步骤(6)。
(6)随后,减小zi的搜索范围
(14)
(15)

(16)
其中,α是一个很小的正整数,本文取α=0.01。
(8)令r=r+1;若r>P,或者E* 随后,利用优化的极限学习机来预测载体图像的每个像素值。其过程如下: (1)按照从上到下、从左到右的顺序,将载体图像的每个像素的指定邻域像素作为优化的极限学习机的训练集的输入部分; (2)再对这些指定邻域像素值完成归一化处理,使其位于-1,1内。通过对其完成训练与学习过程,可获得优化极限学习机的回归模型; 根据优化的极限学习机输出的像素预测值,引入预测误差扩展技术[11]来设计水印信息嵌入过程。水印信息嵌入到载体图像中近零像素中,能够大幅降低嵌入失真。其嵌入过程如下: (1)令尺寸为M×N的载体图像为Ixy,再引入光栅扫描排序机制[14],将其变为一个像素序列{p1,p2,p3,…,pM×N}。对于任意的像素pi,利用上述优化后的极限学习机对其预测,获取其预测值为p′。 (17) (3)然后,利用如下预测误差扩展机制,将水印密文b嵌入到误差di中 (18) 其中,b∈0,1为水印信息位。 (4)根据上述误差扩展机制,形成含水印信息的水印像素 (19) (5)选择一个阈值T,若预测值di (6)利用载体图像中前SL个像素的最低有效位LSB[16]来构成一个新序列R,依据式(18),将水印信息与R嵌入到扩展像素中。 (20) (4)通过步骤(3)处理后,得到水印密文。然后,再利用解密密钥a,T,λ,对水印密文进行复原,获取清晰的水印信息。 为了验证本文水印技术的不可感知性与嵌入失真,在Matlab软件中进行实验,同时,并将文献[5]与文献[6]作为对照组,以反映所提算法的优异性。实验环境是:DELL, 2.5 GHz,双核CPU,400 GB硬盘与4 G RAM。从USC-SIPI测试集中[17]中挑选4幅图像作为载体图像,如图5(a)~图5(c)所示,其大小都是512×512;另外,图5(d)~图5(f)是待嵌入的水印信息。执行水印嵌入的部分参数为a=4,T=8,λ=3.5,α=0.01;输入层、隐层、输出层节点数量分别为m=32、M=8、n=32。 图5 载体图像与水印信息 算法的量化指标为:①不可感知性;②抗失真性能。 利用本文算法、文献[5]、文献[6]这3种技术将图5(d)~图5(f)分别嵌入到图6(a)、图7(a)、图8(a)中,得到的水印结果如图6~图8所示。根据输出水印图像可知,3种算法都具备良好的不可感知性,所有水印信息都成功地嵌入到载体图像中,三者只呈现载体图像的相关信息,攻击者难以从水印图像中获取任何水印数据,如图6~图8所示。但是,视觉评估是难以具体量化这3种技术的隐秘性差异,故本文引入差分图[18]来体现所提技术的优异性。将图7(c)~图7(e)作为实验对象,设置0.4 bpp的嵌入率,获取三者对应的差分图结果如图9所示。根据实验曲线可知,所提水印技术的水印图像的隐秘性最佳,具备更高的不可感知性,其水印图像的像素灰度分布与载体图像的拟合度最高,无阶梯效应,如图9(a)所示,但是,文献[5]、文献[6]虽然具有良好的视觉不可感知性,但是其水印图像的差分图都存在一定的阶梯效应,其像素灰度分布与载体图像的拟合度均要低于所提技术,如图9(b)、图9(c)所示,特别是文献[6],其水印图像的阶梯效应最大。原因是本文技术构造了像素交叉混淆方法,高度置乱了水印像素信息,充分提高了水印图像的不可感知性,且利用了变尺度混沌来优化极限学习机,改善了其回归模型的稳定,提高了载体图像中每个像素的预测精度,将水印信息嵌入到近零像素中,从而使其水印图像的隐秘性最高。而文献[5]虽然也对水印信息进行了混沌置乱,将水印密文嵌入到载体图像中的LSB中,但其是将水印信息随意嵌入到载体像素中,使其嵌入过程存在较大的失真,且单纯的LSB技术的隐秘性不高,从而使其水印图像的不可感知性要低于所提技术。文献[6]算法主要是直接将水印信息嵌入载体图像中,缺乏对水印信息的安全处理,导致其水印图像的隐秘性最低。 图6 Lena图像的水印嵌入测试 图7 Mandrill图像的水印嵌入测试 图8 House图像的水印嵌入测试 图9 3种算法的水印图像的不可感知性测试结果 衡量水印算法的评估指标除了不可感知性外,其提取水印信息的失真程度也是重要指标[3]。故本文以图7(c)~图7(e)为对象,利用本文算法、文献[5]、文献[6]相应的水印信息检测方法来提取初始水印,同时,借助峰值信噪比PSNR、相关系数NC[19]来反映提取水印的失真度,所得数据见表1。根据表1中的测试结果可知,3种算法的提取水印都存在一定的失真,然而,所提水印算法的复原水印的失真度最小,所输出的水印信息和初始水印非常相似,其PSNR、NC值都是最大,分别为46.28 dB、0.995。而文献[5]、文献[6]算法的提取水印质量不佳,其失真度较大,所对应的PSNR、NC值都要小于本文技术。原因是本文算法利用了变尺度混沌来优化极限学习机,提高了其泛化能力与回归模型的稳定,从而提高了载体图像中每个像素的预测精度,通过将水印信息嵌入到近零像素中,有效降低了嵌入失真。而文献[5]、文献[6]两种技术都是将水印信息任意嵌入到载体图像像素中,使其嵌入过程存在一定的失真;虽然文献[5]的不可感知性要高于文献[6],但是由于通过将水印信息直接嵌入到载体图像的低频子带中,通过奇异值分解来实现水印嵌入,在一定程度上可以有效降低视觉失真,使其抗失真性能要高于文献[5]。 为了量化在不同嵌入率下的水印提取失真度,本文以图6(a)、图7(a)、图8(a)为对象,通过设置多个嵌入率,利用所提技术、文献[5]、文献[6]复原水印,形成 表1 不同算法的抗失真性能测试 的PSNR曲线如图10所示。根据PSNR曲线可知,当嵌入率不断增大时,3种技术的复原水印所对应的PSNR值均呈现下降趋势,然而,本文技术的复原水印的PSNR值最大,且对于载体图像中的近零像素,其允许的嵌入容量可超过1位;而文献[5]、文献[6]算法的PSNR值不但要小于所提技术,同样,其每个像素所允许的水印容量都要低于1位。这显示所提水印算法具备更低的水印嵌入失真与更大的水印容量。 图10 不同嵌入率下的各算法水印提取PSNR曲线 为了改善水印图像的不可感知性与抗失真性能,本文提出了基于像素预测误差扩展与优化的极限学习机的图像水印算法。利用Logistic映射来设计像素交叉混淆技术,高度混乱水印信息,对其实现加密,改善水印信息的隐密性;再利用变尺度混沌,来改进极限学习机,提高其回归模型的稳定性与泛化能力。随后,借助优化的极限学习机来预测载体图像中的每个像素,基于像素预测误差扩展方法,将每个像素值的误差与水印信息嵌入载体图像,输出水印图像。最后,利用相应的水印检测技术与密钥来完整复原水印信息。实验结果验证了所提技术的有效性与优异性。



1.3 水印信息的检测



2 仿真结果及分析

2.1 不可感知性能测试分析




2.2 算法抗失真性能测试分析


3 结束语
猜你喜欢
华人时刊(2022年9期)2022-09-06
小哥白尼(军事科学)(2022年2期)2022-05-25
华人时刊(2020年15期)2020-12-14
红领巾·萌芽(2019年8期)2019-08-27
自动化学报(2018年2期)2018-04-12
北京航空航天大学学报(2017年6期)2017-11-23
中国与非洲(法文版)(2017年10期)2017-11-23
制造技术与机床(2017年4期)2017-06-22
CHIP新电脑(2016年3期)2016-03-10
郑州大学学报(理学版)(2014年2期)2014-03-01
